Быстрый старт
Краткое описание
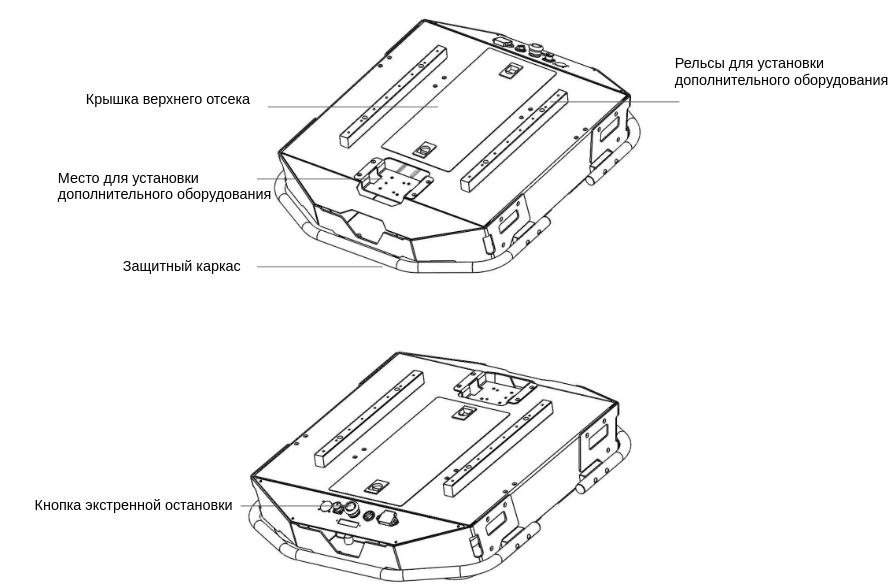
Модель представляет собой готовую платформу для различных сценариев применения, имеет широкий спектр возможностей для разработки, адаптации к различным сферам деятельности, например беспилотной доставки внутри помещений. Он имеет мощную моторную систему, способную выдерживать высокие нагрузки. Комбинация двухколесного шасси позволяет ему перемещать грузы весом до 100 кг. Дополнительные компоненты, такие как стереокамера, лазерный радар, GPS, IMU модуль, манипулятор и компоненты машинного зрения, могут быть установлены пользователем.
Интерфейсы
Коммуникационные интерфейсы расположены на задней панели.
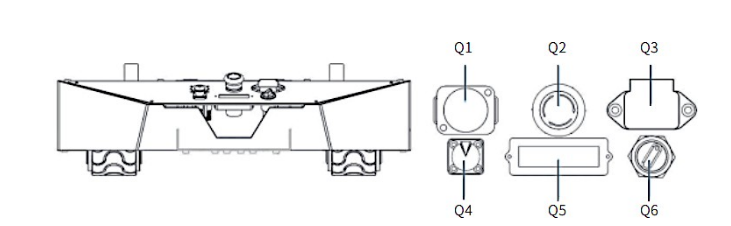
Q1 - Разъём DE-9
Q2 - Кнопка аварийной остановки
Q3 - Порт зарядки
Q4 - Интерфейс расширения для CAN и источника питания 24 В
Q5 - Индикатор заряда
Q6 - Тумблер включения питания
Распиновка Q1: 
Распиновка Q4: 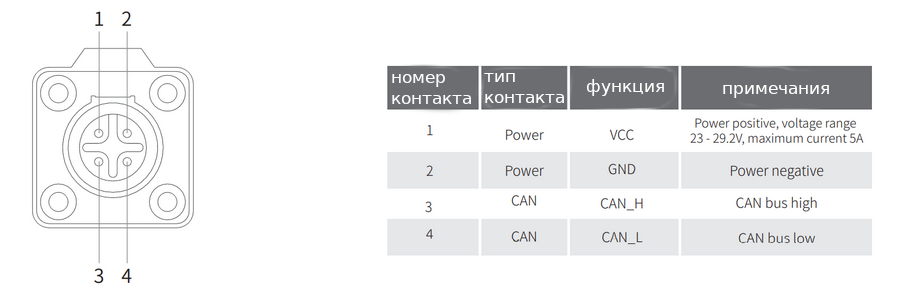
Начало работы
Для того, чтобы включить робота, необходимо повернуть тублер включения питания на задней панели, после этого загорится дисплей с уровнем заряда.
Убедитесь, что кнопка экстренной остановки отжата.
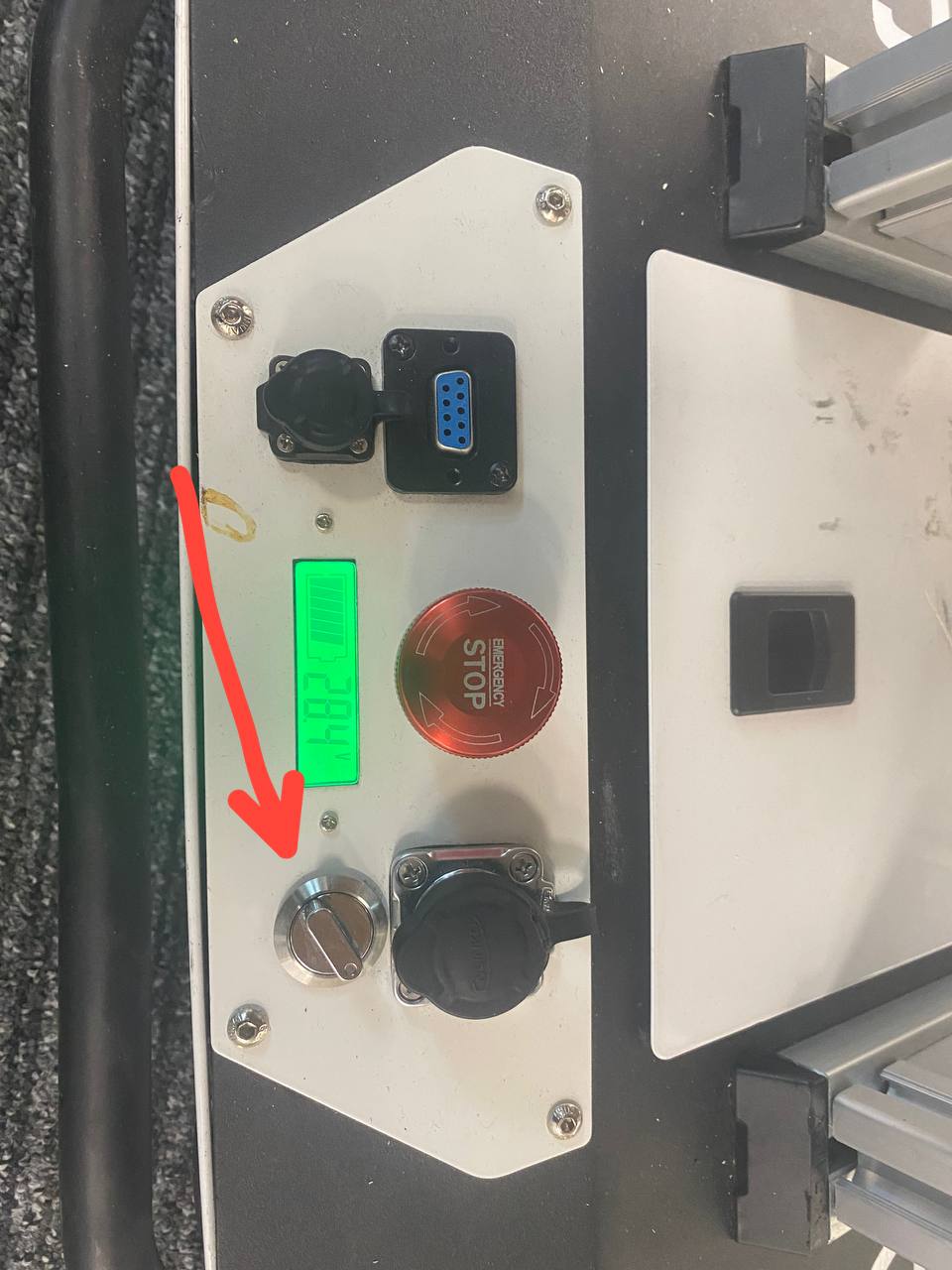
Робот готов к работе.
Обязательным пунктом на этапе эксплуатации служит предварительный внешний осмотр робота перед каждым включением на наличие дефектов: повреждение проводки, отсутствие защищающих элементов корпуса, раскрученных винтов и прочих моментов, отличающихся от первоначального вида робота (в случае обнаружения дефектов дальнейшая эксплуатация робота возможна, однако мы не сможем гарантировать дальнейшее обслуживание в рамках гарантийного договора). Если обнаружен дефект, требуется обратиться к нашим инженерам в службу поддержки через портал ROBOHELP, они смогут оперативно ответить на любые интересующие вопросы.
Дистанционный пульт управления
Пульт управления является универсальными и на нем предварительно настроена привязка, соответствующая используемой модели робота. Не изменяйте привязку в настройках, иначе нормальное управление будет недоступно.
Основное управление
Для того, чтобы включить пульт, необходимо на несколько секунд зажать две круглые кнопки с пиктограмами включения. Пульт запустится вместе со звуковым сопровождением. Для окончания запуска 4 переключателя в верхней части пульта должны быть в верхнем положении. Если это не так, пульт сообщит о необходимости перевести их в соответствующее положение.
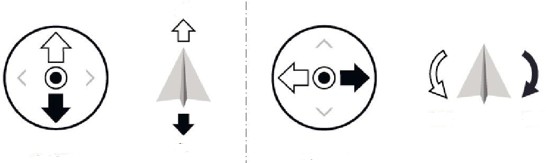
Левый стик управляет движением вперед и назад, правый стик управляет вращением влево и вправо. Скорость движения будет постоянной, пока стик находится в том же положении.
Схема расположения органов управления:
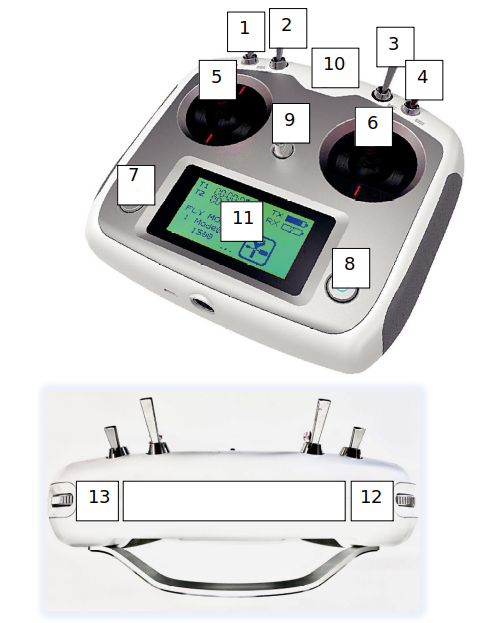
- Переключатель
SWA - Переключатель
SWB - Переключатель
SWC - Переключатель
SWD - Левый стик
- Правый стик
- Кнопка включения (питания) №1
- Кнопка включения (питания) №2
- Крепление для шнурка
- Крепление для дополнительных устройств
- Экран
- Левое колесо
VRA - Правое колесо
VRB
Переключатель SWB отвечает за переключение режимов управления:
- верхнее положение - режим парковки;
- среднее положение - режим управления с пульта
Переключатель SWC отвечает за включение/выключение света;
Как упоминалось выше, по-умолчанию пульт не требует каких-либо настроек, однако в случае некорректной работы пульта, рекомендуется выполнить следующие действия:
Настройка используемой модели
- Разблокируйте контроллер долгим нажатием на значок замка
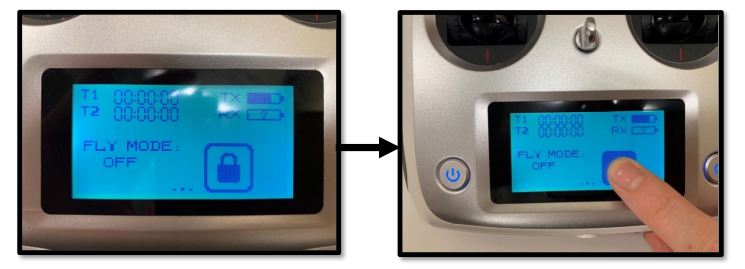
- Откроется меню Function
- Выберите System
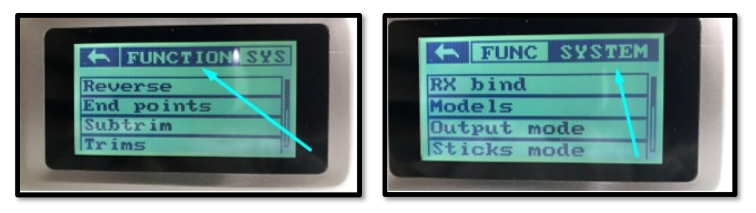
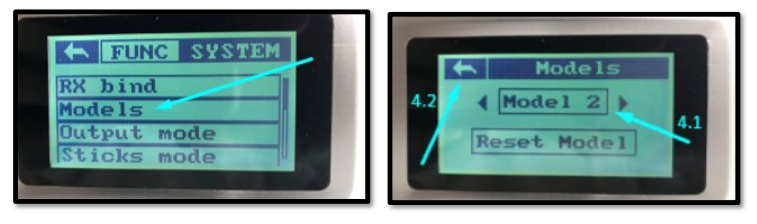
- Нажмите на Models
- Выберите “Model 1” (4.1) и нажмите стрелочку назад (4.2)
- Вернитесь в Function
- Выберите Aux. channels
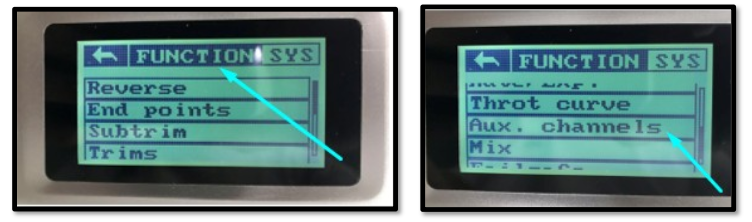
- Выберите Channel 5
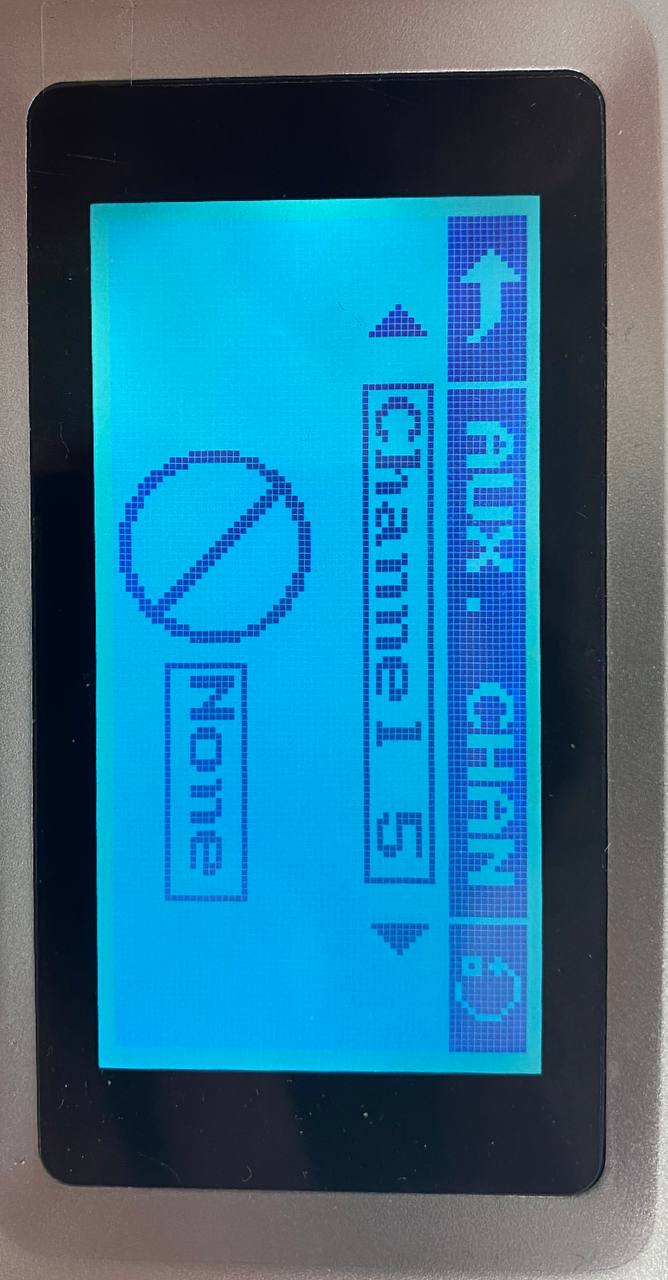
Настройка канала получения информации
Далее настройте каналы связи следующим образом: Channel 5 – VRx – Vr A
Пример настройки Channel 5 – VRx – Vr A:
- Нажмите на Значок селектора:
- Выберите VRx
- Нажмите на окно VrA
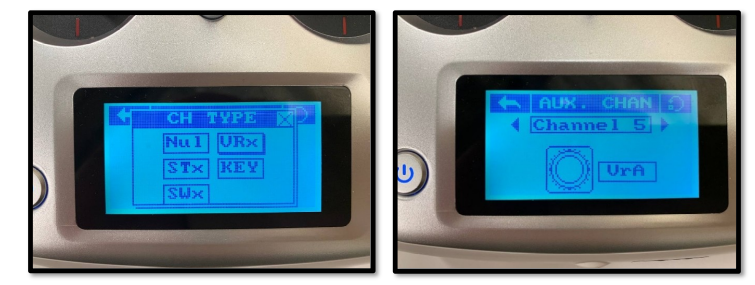
- Выберите
VrAиз установки выше, если значение не было установлено по умолчанию: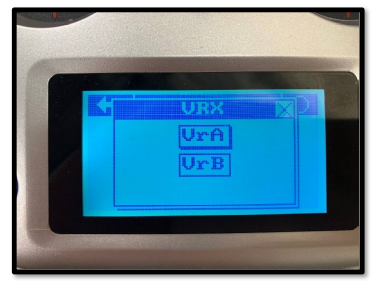
- Проделайте аналогичные операции с другими каналами связи, значения которых представлены ниже:
Channel 6: – SWx – SWC
Channel 7 – SWx – SWA
Channel 8 – SWx – SWB
Channel 9 – SWx – SWD
Channel 10 – KEY – KEY1
После этого нажмите на кнопку выхода и перезагрузите контроллер. 
Калибровка контроллера
- Разблокируйте стартовый экран
- Выберите вкладку System и нажмите на Stick adjust
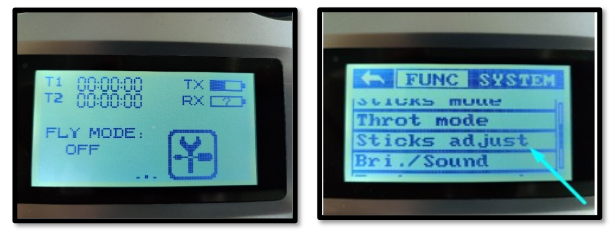
- Далее необходимо левым и правым стиком выполнить следующие действия (последовательность неважна):
Левый стик вверх (до упора)
Левый стик вниз (до упора)
Левый стик влево (до упора)
Левый стик вправо (до упора)
Правый стик вверх (до упора)
Правый стик вниз (до упора)
Правый стик влево (до упора)
Правый стик вправо (до упора)
Колеса VRA и VRB влево и вправо до упора
Результатом успешной калибровки служит заполненная индикация значений MR1, MR2, MR3, MR4, VRA, VRB (допустимы небольшие отклонения, как показано на рисунке):  После этого нажмите на кнопку выхода и перезагрузите контроллер
После этого нажмите на кнопку выхода и перезагрузите контроллер
Зарядка
Убедитесь, что робот выключен (тумблер питания Q6 выключен и экран с индикацией заряда Q5 не горит).
Вставьте вилку зарядного устройства в порт зарядки Q3 на задней панели робота:

Индикатором полного заряда служит датчик на блоке питания, который изменит свой цвет с красного на зеленый 
FAQ
Q: Tracer включен, но не реагирует на пульт дистанционного управления. Что делать?
A: Сначала проверьте, находится ли аккумулятор в заряженном состоянии, а так же не нажата ли кнопка аварийной остановки. Затем проверьте, выбран ли правильный режим управления с помощью переключателя SWB.
Q: Робот начал издавать звуковые сигналы при движении/ ожидании, как это исправить?
A: Этот звук сигнализирует о низком заряде батареи, необходимо проверить заряд на роботе и поставить его на зарядку. Если возникает другой похожий звук, то это могут быть внутренние ошибки. Вы можете проверить соответствующие коды ошибок через шину CAN или обратиться в службу поддержки.
Q: Сколько робот способен работать автономно?
A: В специфику продукта работа от одного заряда изменяется не временем, а пройденным маршрутом. По заявленным характеристикам: около 40 км. В режиме ожидания энергию потребляет только электроника, поэтому робот может быть включен достаточно долго. Эксперименты показывают, что время простоя может достигать до 8 часов.
Upd by Igor P. 03.09.2024