Быстрый старт
Данное руководство дает базовую информацию по эксплуатации робособаки модели JY X20.
Начало работы
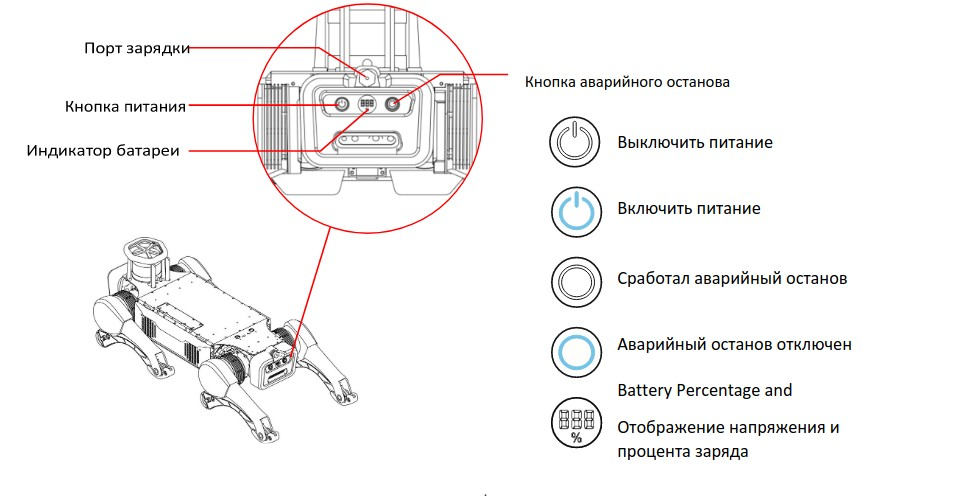
1) Проверка • Проверьте индикатор батареи. Рекомендуется использовать робота, когда заряд батареи составляет не менее 70%. • Убедитесь, что кнопка аварийной остановки не нажата. • Убедитесь, что снаружи робота нет видимых повреждений. • Убедитесь, что джойстик полностью заряжен. Если детали робота повреждены, пожалуйста, не запускайте робота и своевременно свяжитесь с отделом послепродажного обслуживания.
2) Поместите робота на ровную поверхность.
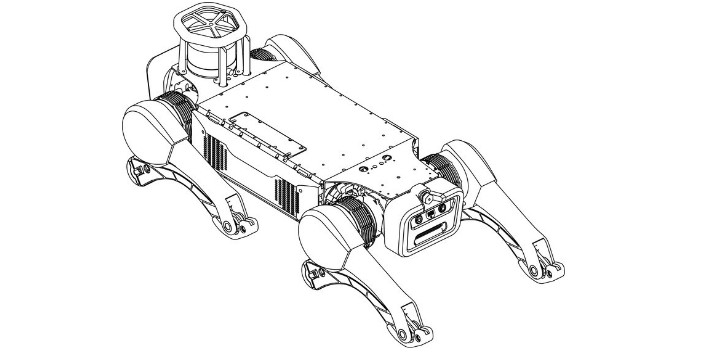
3) Отрегулируйте позу робота в соответствии с требованиями (как показано на рисунке выше): Cогните коленный сустав каждой конечности, удостоверьтесь, что колени каждой ноги робота касаются пола, а нижняя часть тела касается земли. 4) Включение питания. Нажмите кнопку питания на задней панели, чтобы включить робота, индикатор кнопки питания светится синим цветом. Затем убедитесь, что индикатор кнопки аварийной остановки светится синим цветом. Если индикатор не светится, это означает, что сработала кнопка аварийной остановки, и вы должны нажать на нее, чтобы её выключить.
5) Подключение пульта управления. Нажмите и удерживайте кнопку питания, чтобы включить джойстик (пожалуйста, зарядите джойстик при первом использовании), и откройте приложение DEEProbotics, чтобы подключиться к WiFi Jueying X20.
Имя и пароль WiFi следующие:
Имя: WiFi JYL3-*** Пароль :quadruped
Поскольку для запуска робота потребуется некоторое время, вам может потребоваться подождать некоторое время (до 1 минуты), а затем вы сможете подключиться к роботу.
Управление роботом
Режим и походка
| Режим движения | |
| Навигация | Робот движется по запланированному маршруту автономно с функцией автономной навигации |
| Ручной контроль | Управление движением робота в пространстве и вращение туловищем на месте с помощью джойстика |
| Управление положением | Робот может только вставать или опускаться (обычно используется для диагностики робота) |
| Походка | |
| Ходьба | Подходит для плоских поверхностей, таких как бетон (ограниченная максимальная скорость: 1,7 м/с) |
| Бег | Подходит для плоских поверхностей, таких как бетон (максимальная скорость ограничена: 3 м/с) |
| Ползание | Опускание нижней части корпуса для прохождения местности с малой продольной высотой |
| Лестница | Подходит для подъема по ступенькам не выше 18 см. |
| Наклон | Подходит для склонов менее 30° или других неровных поверхностей |
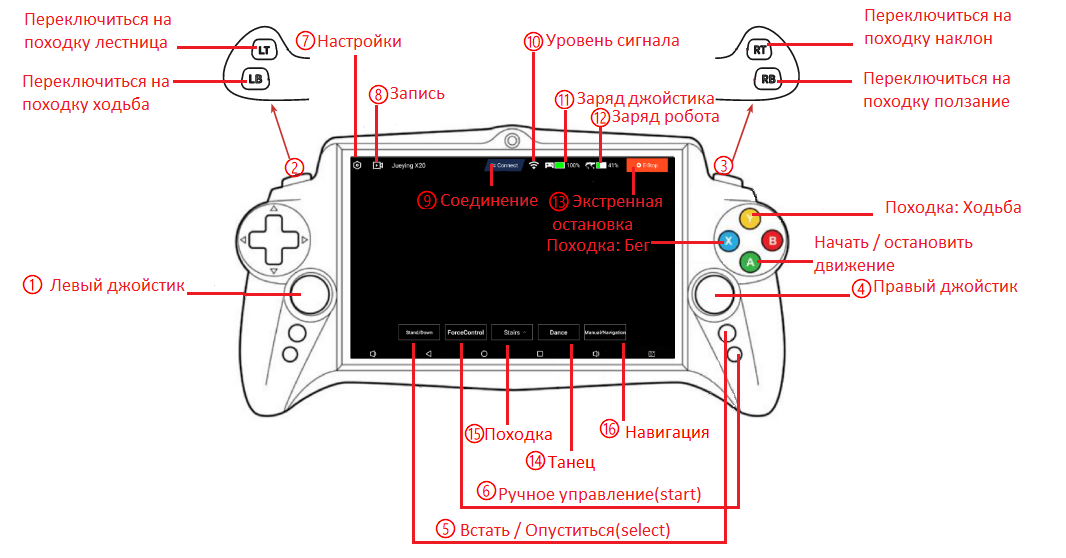
После запуска робот по умолчанию находится в основном режиме движения, пожалуйста, нажмите ⑯ для переключения в режим навигации, если это необходимо. После запуска робот по умолчанию находится в режиме управления положением корпуса, а суставы находятся в состоянии самоблокировки. Необходимо нажать ⑤ чтобы робот встал или опустился. Каждый раз, когда робот встает, сначала нажмите ⑥ чтобы переключиться на шаблон ручной контроль, чтобы робот мог двигаться или поворачиваться. Затем нажмите A, чтобы начать движение – он начнет шагать выбранной в данный момент походкой. Нажмите A еще раз, чтобы закончить ходьбу. Робот обладает инерцией, ему потребуется некоторое время, чтобы он замедлился и остановился после отпускания стика. Аварийная остановка: запускается нажатием ① и ④ одновременно или по нажатию на ⑬.
| Кнопка | Функция |
| ⑥ Ручное управление | Переключиться на ручное управление |
| Начать / остановить движение | Начать или прекратить движение |
| ⑤ Встать / Опуститься | Подъем / Опускание |
| ① Левый джойстик | Движение вперед-назад, а также влево-вправо(боком) |
| ④ Правый джойстик | Вращение вокруг своей оси |
| Y Ходьба | Переключиться на походку ходьба |
| Х Бег | Переключиться на походку бег |
| ② LT | Переключиться на походку лестница |
| ② LB | Переключиться на походку ходьба |
| ③ RT | Переключиться на походку наклон |
| ③ RB | Переключиться на походку ползание |
| ⑭ Походка | Выберите походку: Ходьба/ Бег/ Ползание/ Лестница/ Наклон |
| ⑮ Танец | Запустить танец (можно включить в конфигурационном файле) |
| ⑯ Основной/навигация | Переключение между основным режимом и режимом навигации |
| ⑦ Настройки | Установить язык/ Выбрать перспективу/ Сохранить данные |
| ⑧ Запись | Запись видео с текущего ракурса |
| ⑨ Соединение | Подключиться к роботу по Wi-Fi |
| ⑩ Уровень сигнала | Отображение уровня сигнала робота в режиме реального времени |
| ⑪ Заряд джойстика | Отображение оставшегося заряда батареи джойстика в режиме реального времени |
| ⑫ Заряд робота | Отображение оставшегося заряда батареи робота в режиме реального времени |
| ⑬ Экстренная остановка | Аварийная остановка |
Экстренные ситуации
Аварийная остановка
Когда робот теряет контроль над своими конечностями, сильно трясется или возникают другие ненормальные явления во время использования, нажмите ① и ④ одновременно или одиночное нажатие ⑬, чтобы вызвать аварийную остановку, которая переводит робота в состояние самоблокирующейся защиты и автоматически опускается. Затем нажмите ⑤ чтобы снять самоблокирующуюся защиту и выявить проблему. После устранения неполадок нажмите ④ и ⑥ по очереди, чтобы возобновить работу робота.
В случае аварийной остановки, если робот встает не сразу, необходимо подождать около 30 секунд, прежде чем робот отреагирует на команду.
Падение
Если робот внезапно упадет, суставы будут автоматически заблокированы.Нажмите кнопку Y в приложении, убедившись, что вокруг нет препятствий. Если робот по-прежнему не может подняться, нажмите кнопку аварийной остановки в задней части робота, затем нажмите [Сохранить данные] на странице настроек приложения и выключите робота.
Низкий заряд батареи
Когда заряд батареи робота ниже 10%, сработает защита от пониженного энергопотребления и робот не будет реагировать на команды дистанционного управления с джойстика. Экстренная аварийная остановка Экстренная аварийная остановка осущетвляется нажатием кнопки аварийной остановки на задней панели робота. После срабатывания экстренной аварийной остановки робот полностью отключается и падает на землю. Существует риск повреждения поверхности или робота, поэтому категорически запрещается нажимать кнопку экстренной аварийной остановки во время обычного движения!
Другие обстоятельства
• Если суставы не заблокированы или продолжают качаться после внезапного падения робота, подождите 30 секунд после того, как суставы робота полностью перестанут двигаться, прежде чем нажимать кнопку экстренной аварийной остановки на задней части корпуса. • В случае пожара не используйте воду для его тушения. Пожалуйста, используйте один из следующих типов огнетушителей: пенный огнетушитель, сухой порошковый огнетушитель или углекислотный огнетушитель. • В случае отказа кнопки аварийной остановки, появления дыма или воды в роботе или других непредвиденных ситуаций немедленно отключите питание робота. Затем сообщите о ситуации в сервисный центр, и мы поможем устранить проблему и отремонтировать или заменить вашего робота. Пожалуйста, обратите внимание на безопасность!
Выключение питания
Перед выполнением следующих операций убедитесь, что робот лежит на ровной поверхности. Нажмите кнопку питания, чтобы выключить робота. После выключения накройте робота антистатической тканью, чтобы избежать попадания пыли на лидар и другие устройства.
Обратите внимание на пломбировочную этикетку на роботе. Категорически запрещается разбирать робота лично. После разборки гарантия аннулируется!
Зарядка
- Сначала подключите зарядное устройство к зарядному порту (зарядное устройство имеет разъем для защиты), затем подключите его к сети переменного тока 220 В.
- Во время зарядки индикатор питания и индикатор зарядки на зарядном устройстве горят красным цветом.
- Когда зарядка завершена, на дисплее батареи отображается 100%, а индикатор зарядки становится зеленым.
Всегда обращайте внимание на состояние зарядного устройства во время зарядки, чтобы избежать несчастных случаев.
Часто задаваемые вопросы
Q1: Что делать, если приложение не может подключиться к роботу?
A: Сначала проверьте, включено ли питание на роботе и нет ли другой версии приложения (обновления) в фоновом режиме. Если приложение по-прежнему не может подключиться к роботу, перезапустите робота и приложение и повторите попытку, а так же убедитесь, что используете актуальную версию приложения.
Q2: Нормально ли, что робот перестает двигаться самостоятельно?
A: Двигатель или привод могут быть защищены от перегрева. Пожалуйста, подождите 10 минут и повторите попытку. Если вы по-прежнему не можете управлять движением робота, проверьте, полностью ли заряжена батарея, отключена ли кнопка жесткой аварийной остановки (в выключенном состоянии она светится синим цветом) и подключен ли джойстик к Wi-Fi робота.
Q3: Что делать, если нет ответа на команды из приложения после подключения?
A: Сначала проверьте, отключена ли аварийная остановка (кнопка горит синим, когда она выключена). Затем убедитесь, что джойстик подключен к правильному роботу. Если приложение по-прежнему не может управлять роботом, подождите 10 секунд и повторите попытку.
Q4: Что делать, если столкнулись с проблемой, которую невозможно решить даже после ознакомления с данным руководством?
A: Нажмите Сохранить данные на странице настроек приложения и своевременно свяжитесь с отделом послепродажного обслуживания.