Быстрый старт
Данное руководство дает базовую информацию по эксплуатация робособаки модели B1
Начало работы
Положите B1 на ровную поверхность и вставьте аккумулятор. Аккумулятор вставляется легким усилием и защелкивается. Если аккумулятор не вставляется легко, проверьте, правильно ли вы вставляете батарею, не перевернут ли он. Не делайте сильного нажима, чтобы не повредить интерфейс батареи и разъем.
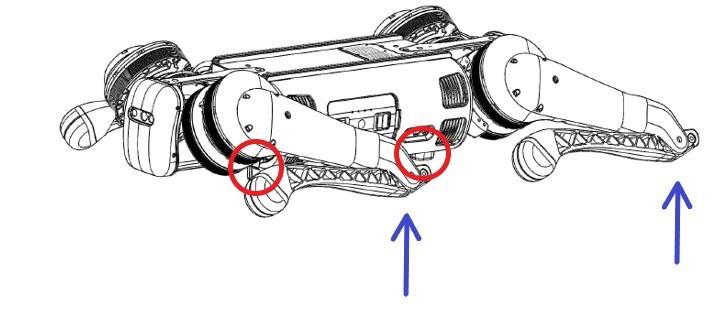
Положите робота в стартовую позицию: корпус лежит на земле горизонтально, без наклона, подставки на животе робота плотно прилегают к земле. Ноги робота собраны как показано на рисунке ниже (четыре локтевых/коленных сустава и резиновые ступни должны касаться земли).
Обязательным пунктом на этапе эксплуатации служит предварительный внешний осмотр робота перед каждым включением на наличие дефектов: повреждение проводки, отсутствие защищающих элементов корпуса, раскрученных винтов и прочих моментов, отличающихся от первоначального вида робота (в случае обнаружения дефектов дальнейшая эксплуатация робота возможна, однако мы не сможем гарантировать дальнейшее обслуживание в рамках гарантийного договора).
В случае обнаружения дефектов требуется обратиться к инженерам в службу поддержки в чате, они смогут оперативно ответить на любые интересующие вопросы.
Для включения робота необходимо провести следующие действия:
- Запуск робота: одно короткое нажатие на кнопку питания на аккумуляторе, второе нажатие длинное - порядка 5 секунд. Результатом успешного включения является характерный звук. При включенном аккумуляторе светодиоды постоянно горят зеленым цветом и являются индикатором уровня заряда.
- Включение пульта: одно короткое нажатие и одно длинное (порядка 5 секунд, до характерного звукового сигнала). Пульт автоматически подключается к роботу. При успешном подключении все светодиоды на левом торце пульта должны гореть.
- После подъема робота на выпрямленные лапы необходимо ожидание порядка 1-2 минут для запуска всех систем на роботе.
Категорически запрещаются любые попытки произвести какое-либо действие с роботом после запуска и до того, как он сам встанет на лапы.
Перед подъемом робот проводит самодиагностику. При неудачном ее завершении робот не встанет. В этом случае в первую очередь необходимо еще раз проверить положение робота на соответствие со стартовой позицией.
Так же возможен случай, когда самостоятельный подъем был отключен программно. Разрешается провести попытку принудительного подъема комбинацией: Двойное нажатие
L2 + B, Двойное нажатиеL2 + A
Управление роботом
Робот может находиться одном из двух глобальных режимов:
- стандартом
- спортивном
Стандартный режим используется при разработке программного управления на низком уровне (управление моторами). Управление движением робота с пульта в этом режиме отключено.
Спортивный режим используется при разработке программного управления на высоком уровне (движение вперед, назад и т.д). В этом случае управление движением с пульта доступно.
Если вы планируете управлять роботом посредством джойстика и заводского программного обеспечения, то пользоваться будете всегда только спортивным режимом.
Спортивный режим имеет 4 подрежима: режим ходьбы, статичное состояние, режим управления туловищем и режим подъема по лестнице
Режим ходьбы в свою очередь имеет дополнительный режим повышенной полезной нагрузки
- После включения робот автоматически переходит в спортивный режим, самостоятельно встает и находится в подрежиме статичного состояния.
- Нажмите
SELECT, чтобы перейти в режим управления туловищем, после чего вы можете управлять положением корпуса с помощью стиков. - Нажмите
START, чтобы перейти в режим ходьбы. В это время вы можете использовать джойстик для управления роботом: движения вперед и назад, сдвигаться из стороны в сторону, поворачиваться на месте и т.д. Если вы не двигаете стики, робот перестанет двигаться. - В режиме ходьбы нажмите
L2 + START, чтобы переключиться в режим подъема по лестнице. В этом режиме высота подъема лап увеличивается и робот может преодолевать препятствия и подниматься по лестнице. Вернуться обратно в режим ходьбы можно нажатиемL2 + START. - В режиме ходьбы нажмите
R2 + Aдля переключения в режим ходьбы с повышенной полезной нагрузки. В этом случае ширина расположения ног робота становится уже, движения будут более стабильными и надежными. - Для возврата в режим ходьбы с обычной (меньшей) нагрузкой, нажмите
R2 + B. - В любом состоянии нажмите
L2 + A, чтобы заблокировать робота (фиксирование моторов), и нажмитеSTART, чтобы разблокировать робота. - Когда робот заблокирован, продолжайте использовать комбинацию
L2 + Aчтобы робот ложился и вставал обратно. -
В любом режиме используйте комбинацию
L2 + Bдля того ввести робота состояние демпфирования (состояние пониженного энергопотребления). В этом состоянии моторы как бы “расслабляются”. Если робот стоял, то он плавно ляжет под собственным весом (но не рухнет, как если бы убрать питание совсем). Настоятельно рекомендуется входить в состояние демпфирования уже находясь в положении лежа, так как все равно имеет место столкновение с землей средней силы. НажмитеL2 + A, чтобы выйти из состояния демпфирования. - Используйте комбинацию
L1 + L2для блокировки/разблокировки управления движением робота с пульта. Блокировка требуется при использовании манипулятора Z1, чтобы переключиться из режима управления роботом на управление манипулятором (манипулятор управляется с пульта).
Рекомендуется проверять температуру моторов и приводов робота каждый час активной эксплуатации. В случае сильного нагрева рекомендуется отключить робота до достижения оптимальной температуры.
Полный перечень команд управления:
| Комбинация | Описание |
|---|---|
| Start | Переключение режимов: ходьба / статичное состояние |
| Select | Переключение режимов: управление туловищем / статичное состояние |
| L2 + A | Фиксирование моторов, переход в положение стоя/лежа |
| L2 + B | Состояние демпфирования (расслабить моторы) |
| ↑ ↓ | Изменение высоты тела над землей |
| L1 + ↑ ↓ | Изменение высоты подъема ноги |
| R2 + X | Восстановление после падения1 |
| R2 + A | Режим ходьбы с повышенной полезной нагрузкой (лапы узко) |
| R2 + B | Возврат в обычный режим ходьбы (лапы на ширине корпуса) |
| L2 + Start | Переключение режимов: ходьба/подъем по лестнице |
| L1 + L2 | Режим управления манипулятором |
| L1 + L2 + Start | Отключение спортивного режима (переход в стандартный режим2) |
Мобильное приложение
- Скачать приложение (iOS/Android) с официального сайта:
- Подключиться к Wi-Fi сети робота:
Имя сети: UnitreeB1-XXX (XXX — его серийный номер)
Пароль: 00000000
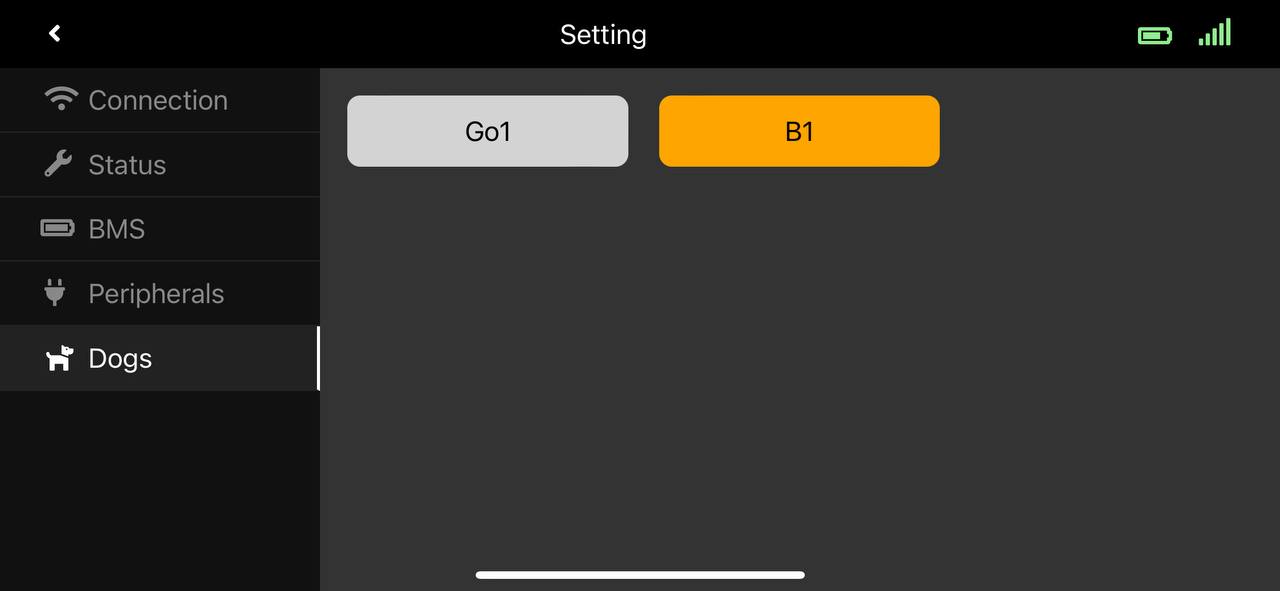
- Открыть приложение и зайти в настройки:

- Перейти в раздел Dogs и выбрать B1:
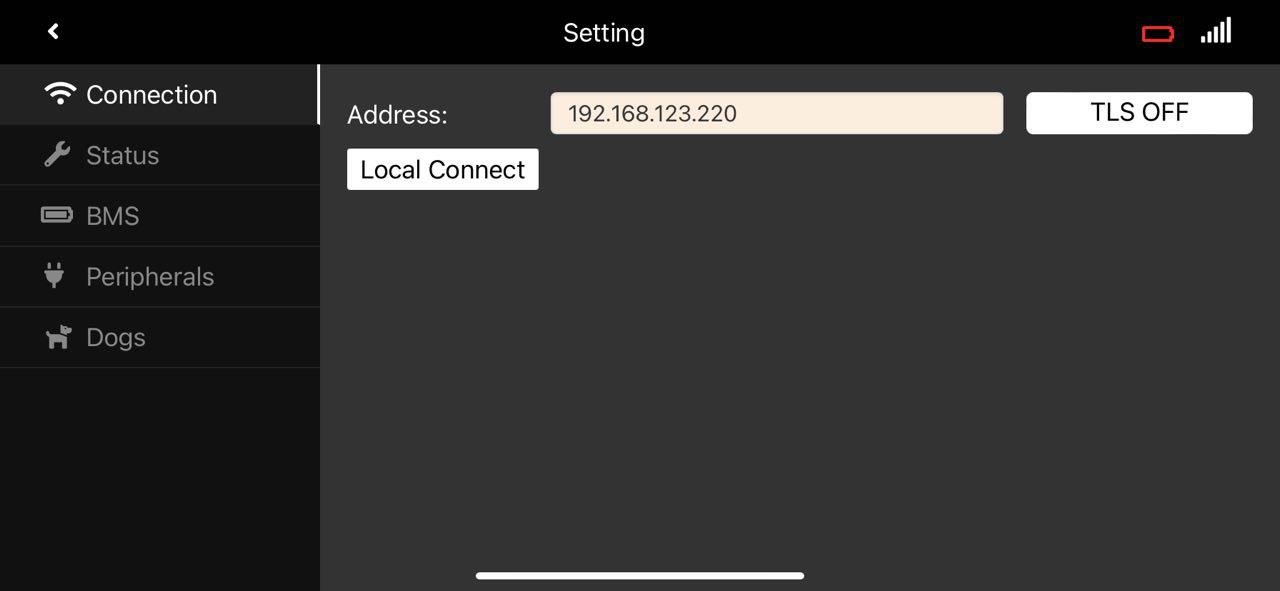
- Указать IP-адрес 192.168.123.220:
- Перейти в режим просмотра

Мобильное приложение позволяет получать:
- видеопоток с камер робота, сохранять скриншоты
- информацию о версиях установленного в роботе ПО
- значения температуры моторов
- BMS-параметры аккумулятора: уровень заряда, температура, напряжение, ток, версия прошивки контроллера, количество произведенных циклов перезарядки
- информацию о версии прошивки главной платы управления
- данные о работоспособности пульта (через Bluetooth): заряд пульта, положении органов управления (кнопки, стики)
Общие проблемы и решения
Бывает, что робот B1 может работает ненормально. Большинство нештатных ситуаций имеют решения, пользователи не должны паниковать, сталкиваясь с ними. Если у вас есть вопросы, обращайтесь к нашим инженерам в службу поддержки через портал ROBOHELP, они смогут оперативно ответить на любые интересующие вопросы.
Некоторые проблемы и их решения:
Самозащита после падения
При использовании официальной программы управления движением Unitree Robotics (спортивный режим, управление движением робота с помощью пульта) робот переходит в состояние самозащиты в случае падения, вызванного параметрами внешней среды (отсутствие трения и т.д) или неправильной эксплуатацией, двигатели робота автоматически переключатся в состояние торможения для защиты узлов робота. В этом случае нужно перезапустить робота, предварительно расположив в стартовую позицию.
Как выключить робота при выходе из строя пульта дистанционного управления
При выходе из строя пульта дистанционного управления (например, при его разрядке и т.д) возникает проблема выключения стоячего робота. Необходимо воспользоваться кнопкой питания аккумулятора, но в этом случае робот рухнет на землю. Поэтому при выключении робота необходимо придержать его за голову и хвост и медленно положить на землю.
Робот падает и не может стоять при включении
Не используется правильная начальная поза, что приводит к неправильному наклону корпуса. Перезапустите робота из правильного стартового положения.
Перевод робота в режим ожидания и малого энергопотребления
Для работы робота в течение длительного времени, переведите робота в лежачее положение и нажмите (нажмите клавиши L2 + B, чтобы войти в режим демпфирования). Это предотвратит падение робота при разряде аккумулятора!
Если робот отключается в процессе управления с достаточно заряженной батареей, нужно вытащить ее и вставить снова, затем запустить робота повторно (распространенная ошибка).
-
Перед восстановлением после падения проверьте, не мешают ли ноги робота друг другу. Если мешают — расслабьте моторы (L2 + B) и выставьте положение суставов в соответствии со стартовой позицией. ↩
-
На текущей версии ПО при переходе в стандартный режим робот потеряет возможность управления движением с пульта ↩