Быстрый старт
Данное руководство дает базовую информацию по эксплуатация робособаки модели B2
B2 — это четвероногий робот, предназначенный для промышленного применения, отличающийся работой в различных погодных условиях, большой нагрузкой и возможностями для аппаратного расширения, многомерным восприятием, охватом всей сцены, мощной вычислительной мощностью и точным позиционированием.
- Этот продукт не является игрушкой и не предназначен для использования лицами младше 18 лет. Храните в недоступном для детей месте и будьте осторожны при работе в присутствии детей.
- Вы обязаны знать законы вашего региона и соблюдать соответствующие законы и правила.
- Этот раздел представляет собой вводную главу для новых пользователей, изучающих управление роботами. Прочитав этот раздел, новые пользователи могут быстро освоить использование пульта дистанционного управления роботом и достижения отличных показателей движения. Старые и новые пользователи могут прочитать эту главу, чтобы понять основы управления роботом.
- Когда пользователи запускают программу, разработанную ими самими, в режиме разработчика, то робот по-прежнему может исполнять команды с пульта удаленного управления. В это время, если роботу будут отправлены команды API высокого уровня и команды дистанционного управления, обе команды будут выполнены роботом. Это может привести к нестабильной работе робота. Обязательно определите, нужно ли пользователям использовать пульт дистанционного управления, в зависимости от рабочего состояния робота. Команды удаленного управления не работают во время низкоуровневой разработки.
- При использовании контролируйте робота в пределах видимости, держитесь на расстоянии 2 метра от робота и не прикасайтесь к роботу руками после его включения.
- После включения B2, робот по умолчанию переходит в режим управления AI и автоматически встает. Пожалуйста, держитесь на безопасном расстоянии от четвероногого робота!
- При использовании сложных команд дистанционного управления, таких как прыжок вперед, убедитесь, что в пределах полукруга диаметром 2 метра перед собакой-роботом нет препятствий (особенно людей). Если в результате нестандартных операций возникнут какие-либо несчастные случаи или материальный ущерб, Yushu Technology не будет нести ответственность за любые возникшие убытки и последствия!
- Стандартные инструкции по переключению: при переключении режимов управления убедитесь, что собака-робот находится в положении лежа или демпфирования и что в радиусе 1 метра нет людей. После успешного переключения режимов управления собака-робот автоматически встанет. Если в результате нестандартных операций возникнут какие-либо несчастные случаи или материальный ущерб, Unitree Robotics и 3Logic Group не будут нести ответственность за любые возникшие убытки и последствия!
- Когда заряда аккумулятора низок и горит всего один светодиод, пожалуйста, вовремя остановитесь и выключите собаку-робота, выньте аккумулятор для зарядки, чтобы избежать повреждений в результате падения при низком заряде аккумулятора.
Введение
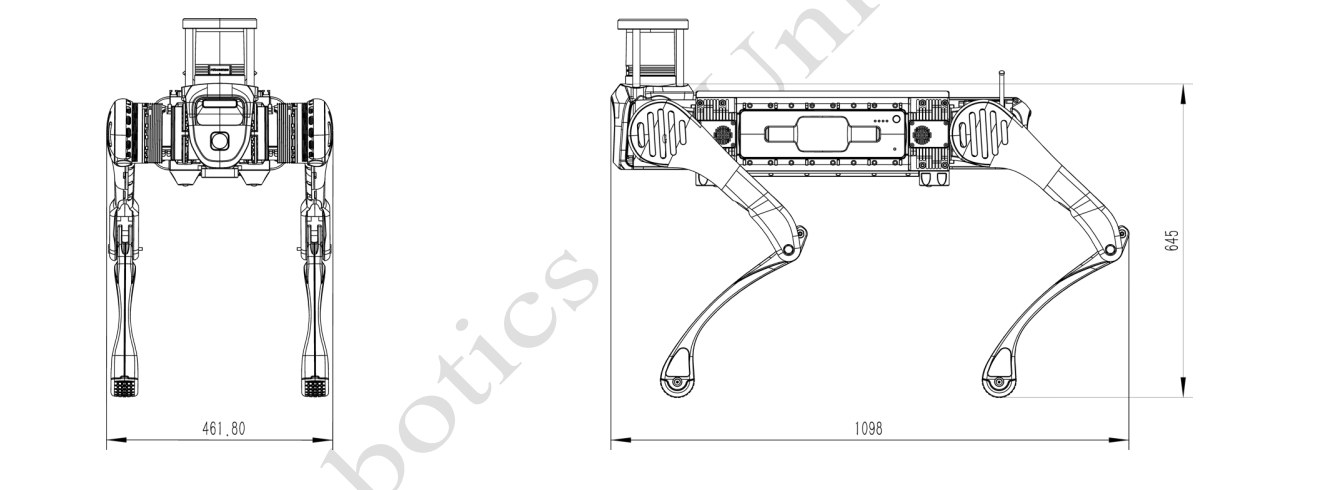
Четвероногий робот промышленного класса B2 обладает исключительной мобильностью: максимальная скорость движения превышает 6 м/с. Основная конструкция корпуса изготовлена из высокопрочных и легких материалов, таких как аэрокосмический алюминиевый сплав и углеродное волокно. Весь агрегат весит 60 кг. Он способен прыгать на расстояния от 0,5 до 1,2 м и адаптироваться к различным сложным ландшафтам. Все соединительные материалы изготовлены из алюминиевого сплава 6061 T6, а некоторые ключевые компоненты изготовлены из сплава 7075-T6, способного выдерживать удары при падении. В стандартной комплектации он оснащен широкоугольным всенаправленным сенсором - LiDAR, а также камерой глубины и оптической камерой спереди и сзади, что обеспечивает B2 отличные возможности предотвращения препятствий и адаптации к местности. В сочетании с алгоритмами глубокого обучения он позволяет добиться гибкого и динамичного обхода препятствий. B2 оснащен процессорами Intel Core i5×1, Intel Core i7×3 и Nvidia Jetson Orin NX×1 (с различными в конфигурациями), обеспечивающими мощные вычислительные возможности для искусственного интеллекта.
Функциональные возможности
- Супер большая грузоподъемность, универсальный помощник B2 имеет очень большую грузоподъемность: максимальная нагрузка стоя составляет 120 кг, а нагрузка при непрерывной ходьбе — 40 кг. Робот может удовлетворить различные требования к нагрузке при выполнении специальных и сложных операций и стать универсальным и мощным помощником операторов в чрезвычайных ситуациях.
- Длительный срок службы при непрерывной работе. Робот B2 оснащен аккумулятором емкостью 45 000 мАч, оснащенным высокопроизводительными аккумуляторными элементами и усовершенствованной системой управления аккумулятором (BMS), независимо разработанной Unitree Technology. Робот может работать непрерывно более 5 часов без нагрузки и более 4 часов с нагрузкой массой 20 кг, обеспечивая мощную силовую поддержку четвероногому роботу B2. Кроме того, он может быть дополнительно оснащен контактной зарядной панелью для автономной подзарядки, что значительно сокращает время работы и повышает эффективность, а также обеспечивает надежную поддержку при любых погодных условиях!
- Невероятная мощность, превосходные спортивные результаты B2 отличается исключительной мобильностью: максимальная скорость движения превышает 6 м/с, что позволяет быстро выполнять различные задачи и значительно повышать эффективность работы. Он также обладает исключительными возможностями преодоления препятствий: максимальная дистанция прыжка составляет 1,2 метра, что позволяет ему легко преодолевать высокие препятствия или канавы и адаптироваться к различным сложным ландшафтам.
- Адаптивность к различным поверхностям, отличная способность преодолевать препятствия. B2 оснащен широкоугольным всенаправленным лидаром, а также камерой глубины и оптической камерой спереди и сзади, обеспечивающей дальнее восприятие и надежную защиту от помех. Сочетание этих датчиков в сочетании с независимо разрабатываемыми и постоянно оптимизируемыми алгоритмами управления движением позволяет распознавать особенности местности с высоким разрешением для гибкого и динамичного обхода препятствий. Это позволяет роботу легко подниматься по лестнице и преодолевать пересеченную местность, адаптироваться к различным сложным ландшафтам и погодным условиям, таким как руины и железнодорожные пути, а также обладать высокой мобильностью и гибкостью. Он может заменить людей при выполнении задач во многих особых условиях или средах повышенного риска.
- Степень защиты от пыли и водонепроницаемости IP67. Конструкция кузова B2 изготовлена из высокопрочных уплотнительных материалов, эффективно предотвращающих попадание воды внутрь. Важнейшие детали и соединения также подвергаются специальной обработке, обеспечивающей нормальную работу при погружении в воду. Благодаря степени защиты IP67 (сертифицировано) он может выдерживать дождь на открытом воздухе и различные суровые условия во время работы.
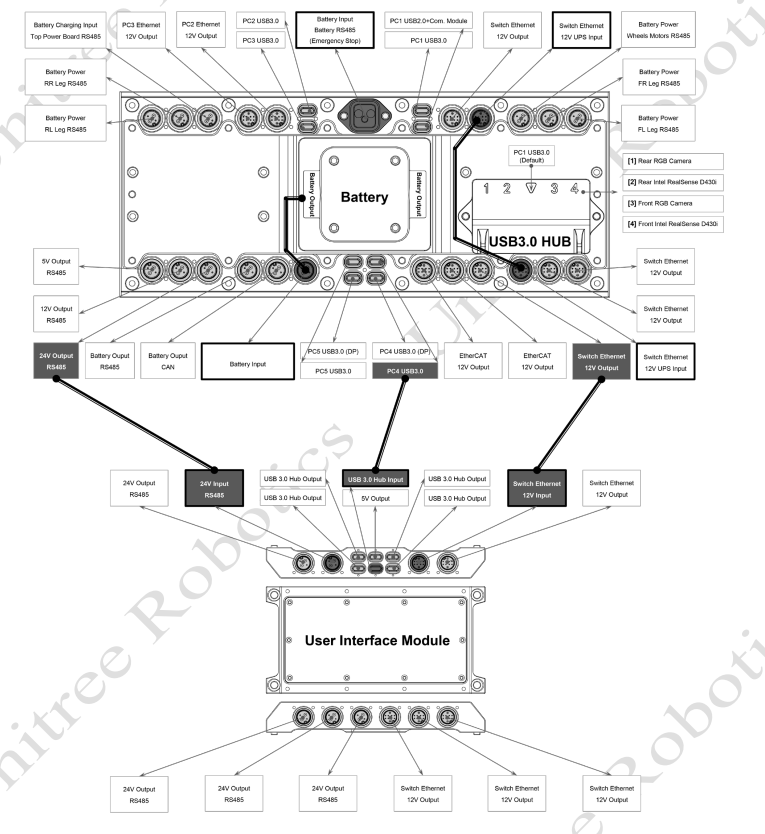
- Робот оснащен дополнительными периферийными устройствами для повышения точности работы. B2 предоставляет несколько интерфейсов расширения, включая 1000M-Base-Ethernet×4, USB3.0×4, 12В×4, 5В×1, 24В×4 и BAT×1, что позволяет подключить различные периферийные устройства. Робот может быть интегрирован с продуктом собственной разработки Unitree — роботизированной рукой Z1 — для выполнения сложных задач. Пользователи также могут адаптировать различные периферийные устройства, такие как датчики газа, датчики температуры, сети 5G, ИК-сенсоры, промышленные камеры и т. д., для различных сценариев применения, включая проверку линий электропередачи, пожарно-спасательные работы и промышленную логистику. Эта возможность расширяет возможности традиционных операций, делая их более безопасными, эффективными и повышая операционную точность.
Описание интерфейсов
Начало работы
Положите B2 на ровную поверхность и вставьте аккумулятор. Аккумулятор вставляется легким усилием и защелкивается. Если аккумулятор не вставляется легко, проверьте, правильно ли вы вставляете батарею, не перевернут ли он. Не делайте сильного нажима, чтобы не повредить интерфейс батареи и разъем.
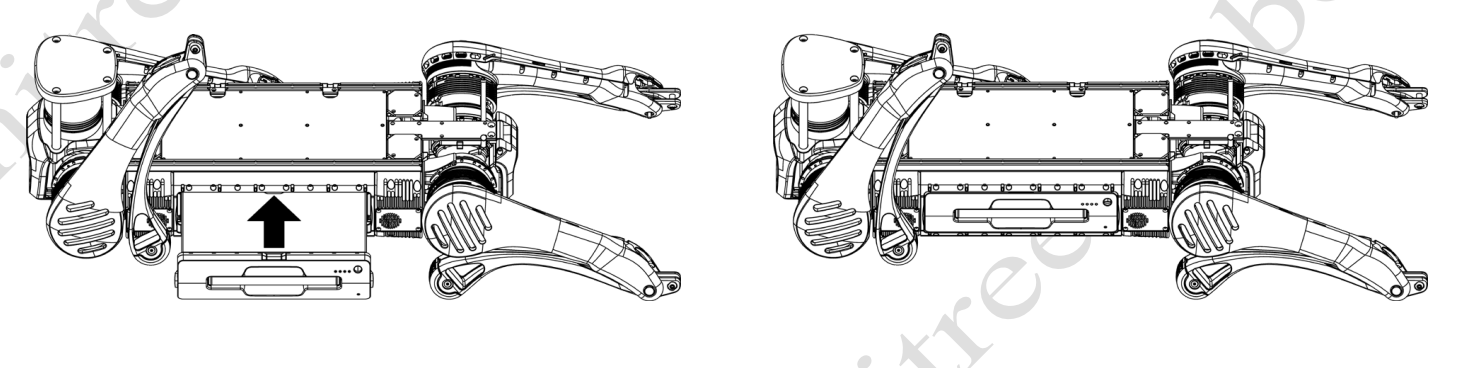
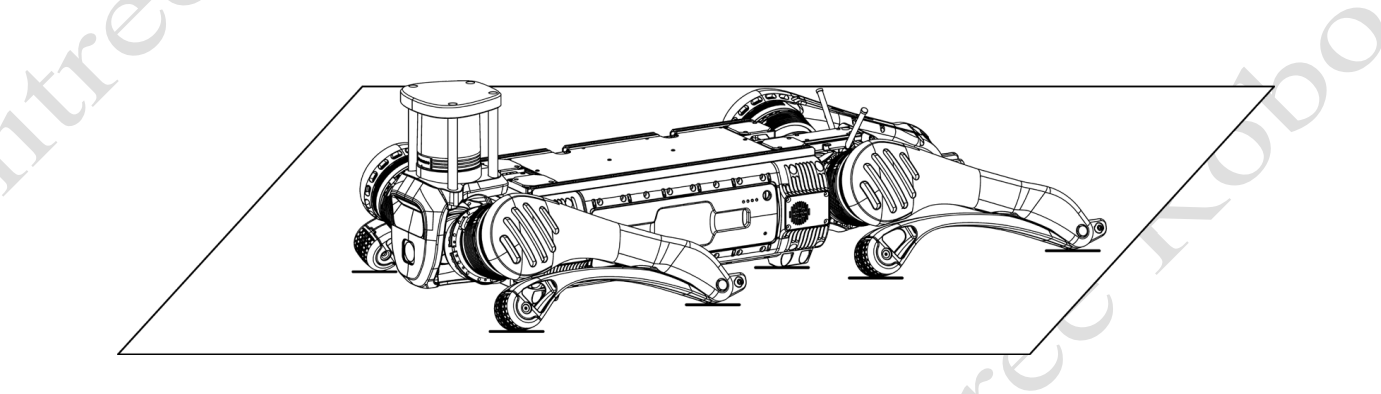
Положите робота в стартовую позицию: корпус лежит на земле горизонтально, без наклона, подставки на животе робота плотно прилегают к земле. Ноги робота собраны, как показано на рисунке ниже (четыре локтевых/коленных сустава и резиновые ступни должны касаться земли).
Обязательным пунктом на этапе эксплуатации служит предварительный внешний осмотр робота перед каждым включением на наличие дефектов: повреждение проводки, отсутствие защищающих элементов корпуса, раскрученных винтов и прочих моментов, отличающихся от первоначального вида робота (в случае обнаружения дефектов дальнейшая эксплуатация робота возможна, однако мы не сможем гарантировать дальнейшее обслуживание в рамках гарантийного договора).
В случае обнаружения дефектов требуется обратиться к инженерам в службу поддержки в чате, они смогут оперативно ответить на любые интересующие вопросы.
Для включения робота необходимо провести следующие действия:
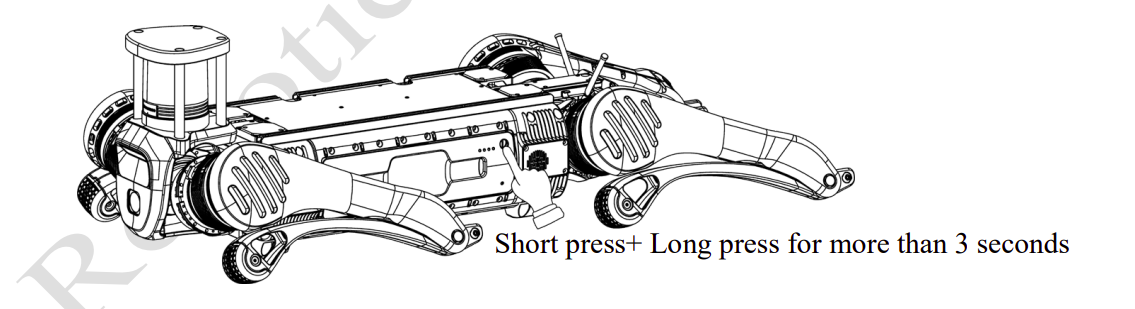
- Запуск робота: одно короткое нажатие на кнопку питания на аккумуляторе, второе нажатие длинное - порядка 5 секунд. Результатом успешного включения является характерный звук. При включенном аккумуляторе светодиоды постоянно горят зеленым цветом и являются индикатором уровня заряда.
- Включение пульта: одно короткое нажатие и одно длинное (порядка 5 секунд, до характерного звукового сигнала). Пульт автоматически подключается к роботу. При успешном подключении все светодиоды на левом торце пульта должны гореть.
- После подъема робота на выпрямленные лапы необходимо ожидание порядка 1-2 минут для запуска всех систем на роботе.
Категорически запрещаются любые попытки произвести какое-либо действие с роботом после запуска и до того, как он сам встанет на лапы.
Перед подъемом робот проводит самодиагностику. При неудачном ее завершении робот не встанет. В этом случае в первую очередь необходимо еще раз проверить положение робота на соответствие со стартовой позицией.
Так же возможен случай, когда самостоятельный подъем был отключен программно. Разрешается провести попытку принудительного подъема комбинацией: Двойное нажатие
L2+B, Двойное нажатиеL2+A
Приложение Unitree Explore App
Чтобы использовать робота в первый раз, необходимо привязать его в приложении. Во время процесса привязки включите Bluetooth на своем мобильном телефоне и держите его рядом с B2. 1) Загрузите, установите приложение Unitree Explore и войдите в систему, используя корпоративную учетную запись и пароль, предоставленные от Unitree.
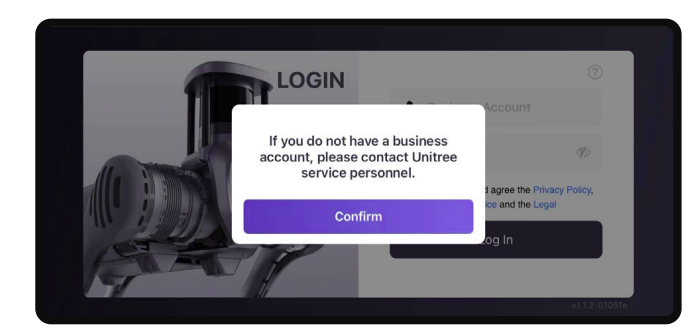
Если у вас нет бизнес-аккаунта, обратитесь к сотрудникам 3logic group, чтобы создать аккаунт!
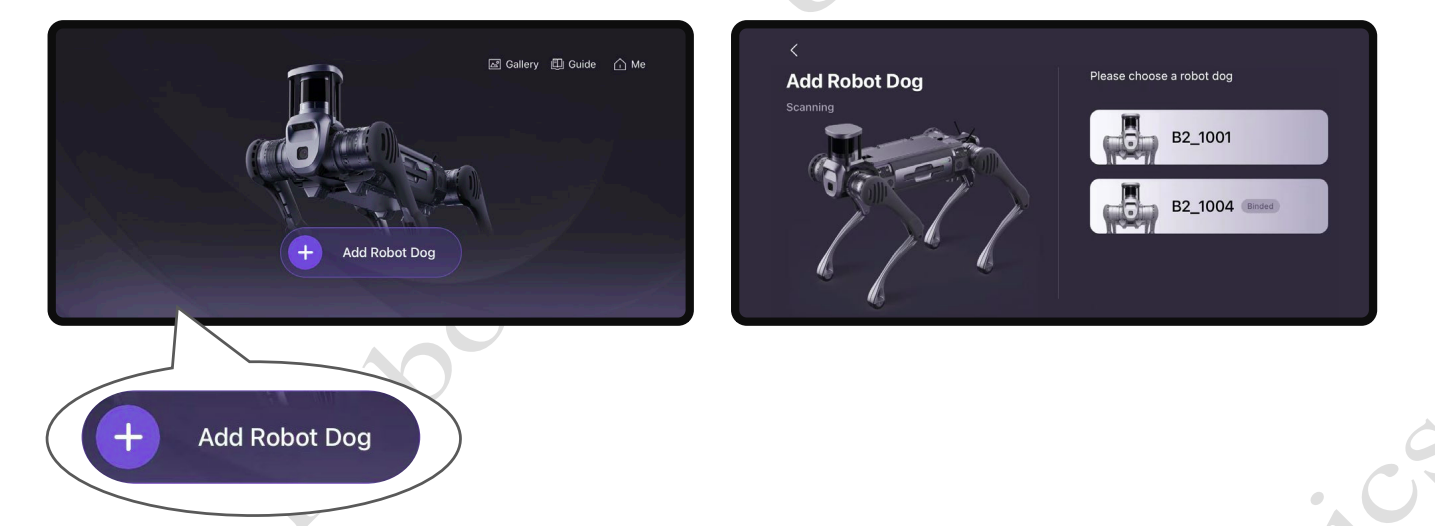
2) После включения питания B2 добавьте робота в приложение Unitree Explore: нажмите «Добавить робота» на главной странице -> выберите робота, которого хотите добавить.
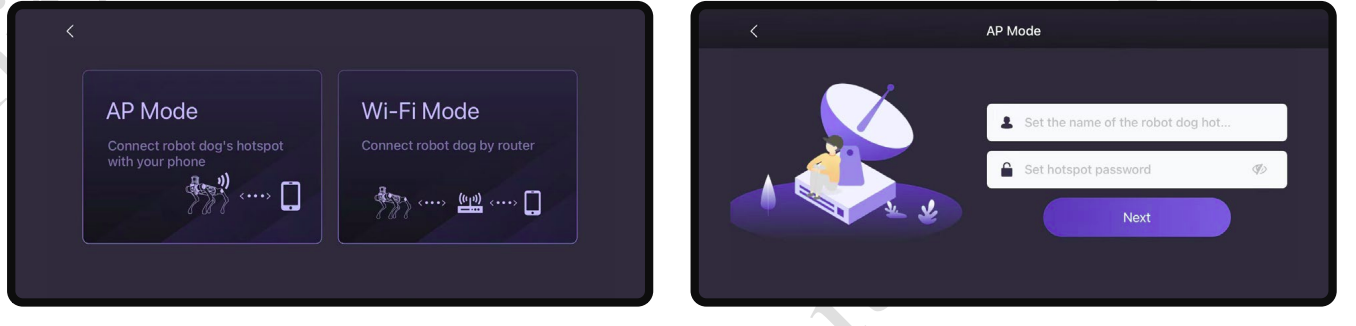
3) Привязка B2. Вы можете выбрать режим прямого подключения к точке доступа или режим подключения Wi-Fi. После успешного подключения вы сможете изучить встроенные обучающие материалы, чтобы быстро освоить приемы управления.
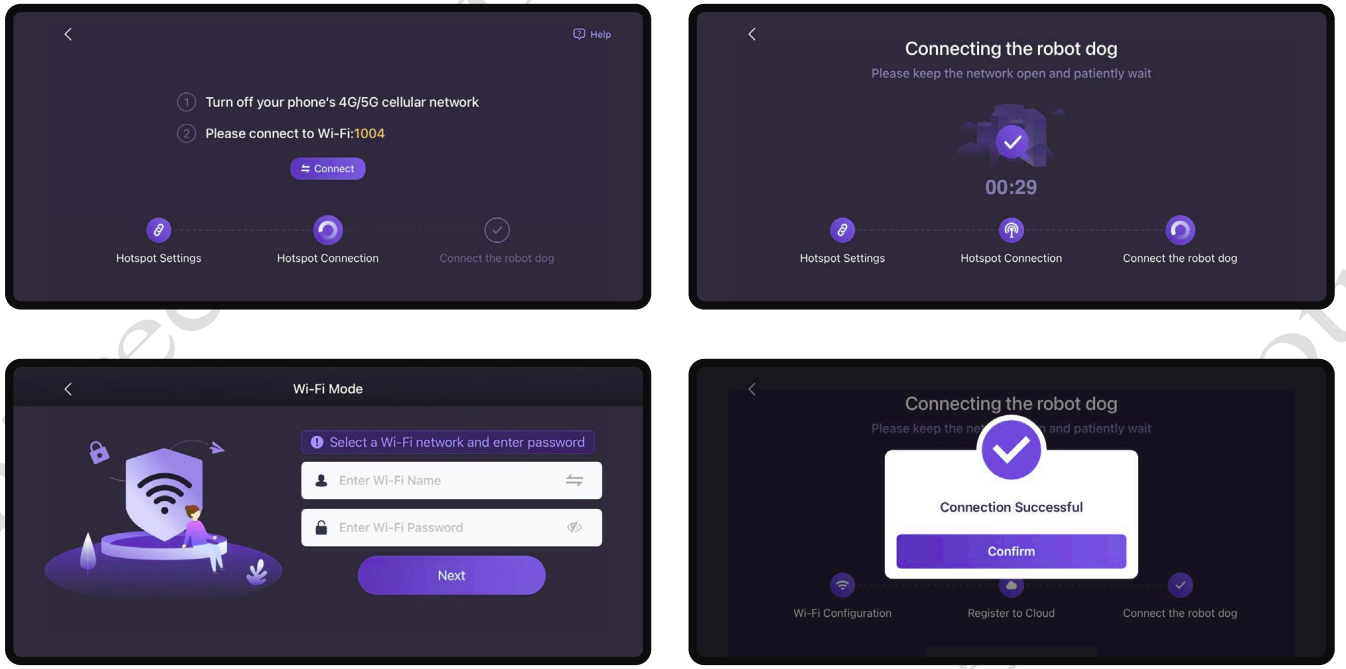
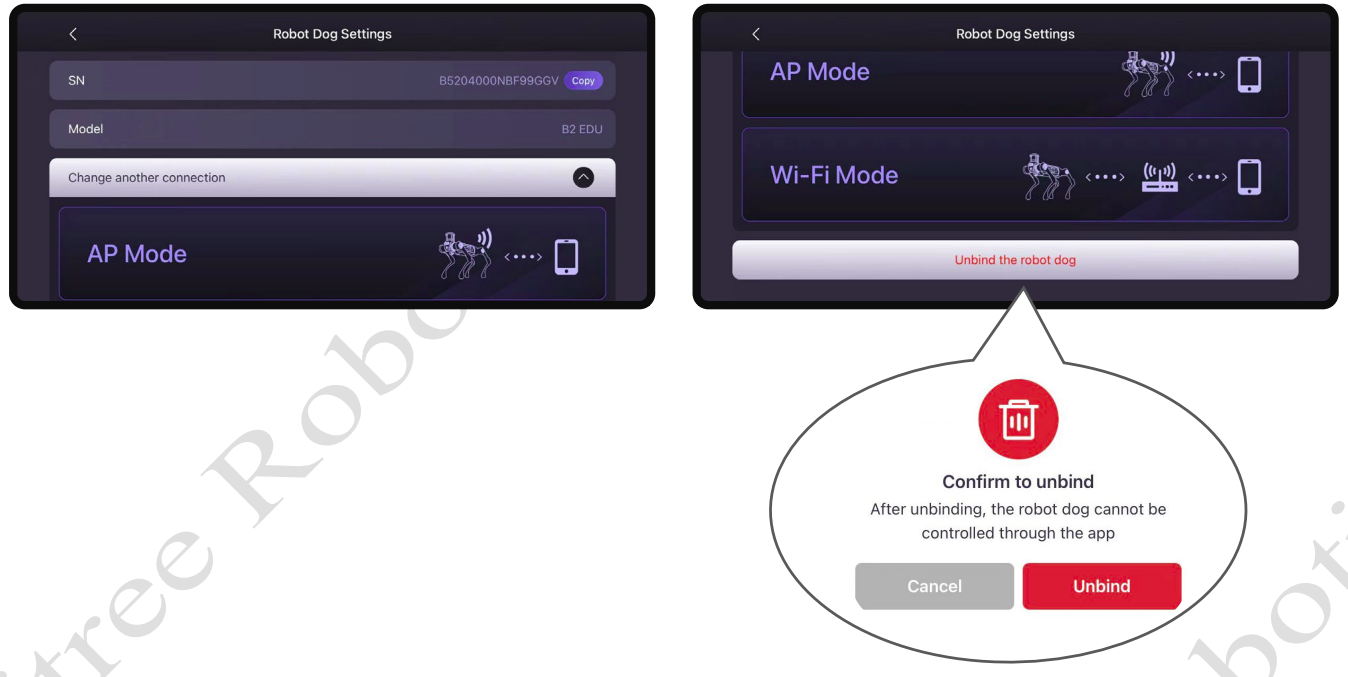
4) Как изменить привязку к аккаунту? Нажмите на домашнюю страницу, чтобы перейти в [Настройки] -> [Настройки робота], затем выберите «Отменить привязку», чтобы снять привязку собаки-робота к текущей учетной записи. После того как собака-робот будет отвязана, ее можно будет привязать к другой учетной записи.
Пожалуйста, оставляйте Bluetooth вашего мобильного телефона включенным во время соединения! Ошибка подключения Bluetooth: приложению Unitree Explore требуется доступ к разрешениям Bluetooth. Пожалуйста, откройте Разрешение Bluetooth для Unitree Explore в настройках приложения вашего телефона. Если вы забыли привязать свою учетную запись или потеряли ее, обратитесь к соответствующему персоналу Unitree!
Управление роботом
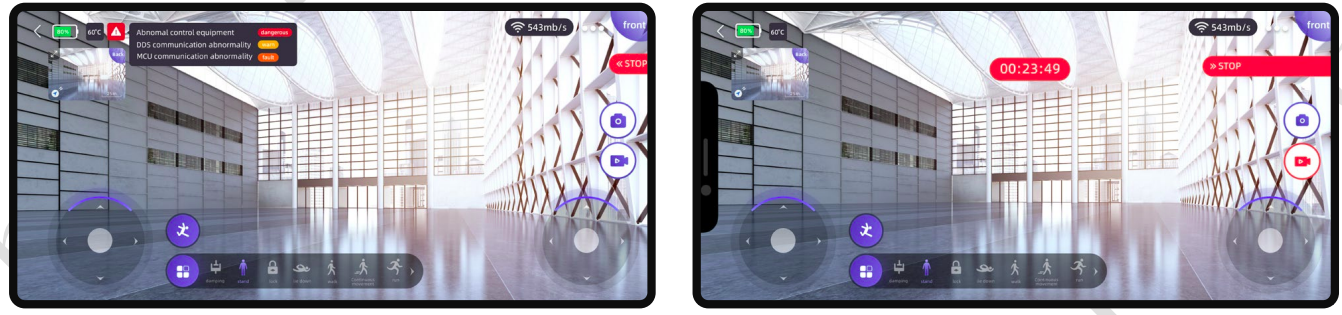
1) Используйте приложение Unitree Explore для управления После прохождения уроков по руководству пользования в приложении Unitree Explore вы сможете использовать это приложение для управления B2.
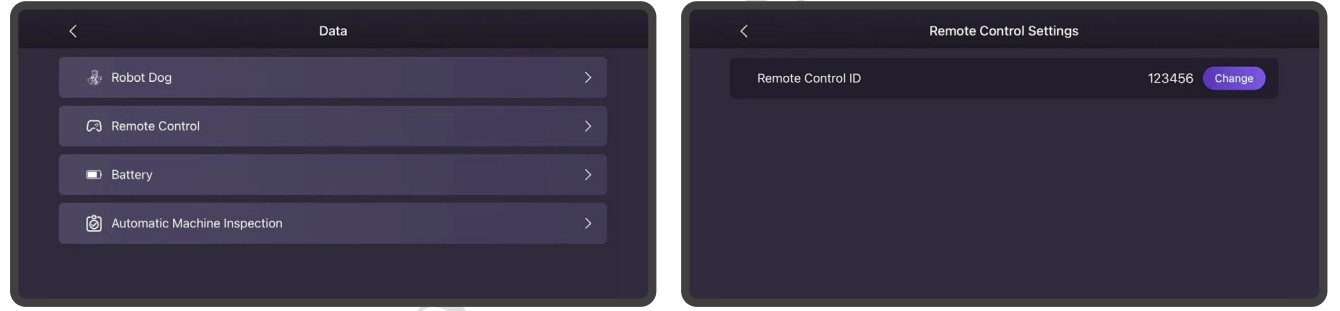
2) Используйте пульт дистанционного управления. Сначала кратковременно нажмите кнопку питания на пульте дистанционного управления, затем нажмите и удерживайте кнопку питания более 2 секунд. Когда вы услышите звуковой сигнал, пульт дистанционного управления включится. Чтобы использовать пульт дистанционного управления в первый раз, вам необходимо привязать его в приложении Unitree Explore. Зайдите в [Settings] -> [Remote Control Settings], введите соответствующий код пульта дистанционного управления, чтобы связать его с модулем передачи данных на собаке-роботе. Нажмите [Modify], чтобы изменить ID пульта дистанционного управления на ваш.
Как только пульт дистанционного управления будет включен и успешно подключен к B2, индикатор передачи данных на левой стороне загорится полностью, показывая, что пульт дистанционного управления подключен к модулю передачи данных B2. На этом этапе вы можете использовать либо команды дистанционного управления в обычном режиме, либо команды дистанционного управления в режиме AI, чтобы управлять собакой-роботом и выполнять соответствующие действия. Между ними есть различия:
Обычный режим дистанционного управления: основан на ручном управлении, где все зависит от оператора. Режим дистанционного управления AI: Робот будет автономно адаптироваться к окружающей среде и принимать решения, обеспечивая лучшую проходимость в таких сценариях, как подъем по лестнице и ходьба по пересеченной местности.
Робот может находиться в одном из двух глобальных режимов:
- AI режим
- основной режим
Рекомендуется проверять температуру моторов и приводов робота каждые 2 часа активной эксплуатации. В случае сильного нагрева рекомендуется отключить робота до достижения оптимальной температуры моторов
Переключение типа опор
Робот версии B2W, кроме мотор-колес в поставке имеет лапы, как на обычной версии робота. Переключение между типом опор осуществляется из приложения Unitree Explore.
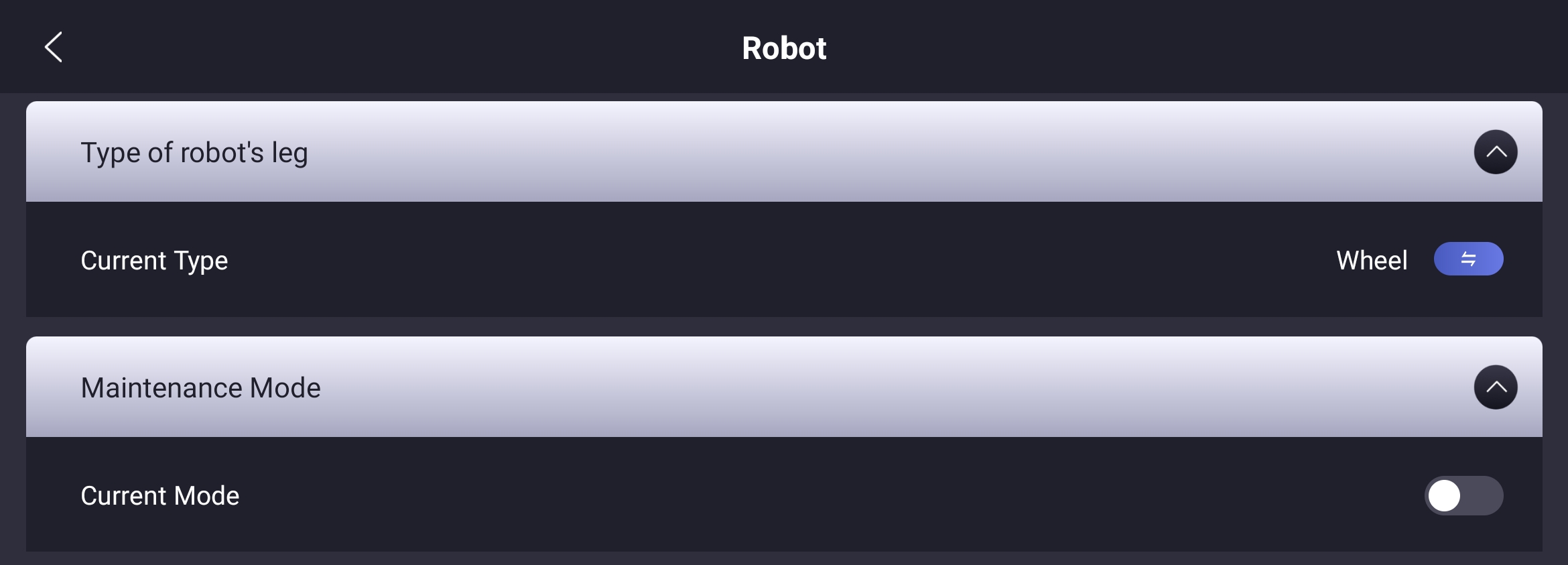
Зайдите в [Device] -> [Robot], снизу данного раздела меню переведите робота в режим обслуживания[Maintenance mode], предварительно положив его на пол комбинацией L2 + A. Выключите робота и замените опоры. После смены опор запустите B2 и в приложении смените тип опор, переключив Wheel на Solid или наоборот. Выведите робота из режима обслуживания [Maintenance mode] и перезапустите робота.
* Если после смены опор на колеса робот не встает после запуска, Вам следует проверить корректность подключения коннекторов для мотор-колес.
Стартовое положение робота с колесами аналогично стартовому положению с обычными лапами
Управление B2 с лапами
Полный перечень команд управления:
| Комбинация | Описание |
|---|---|
| Start | Переключение режимов: ходьба / статичное состояние |
| Select | Переключение режимов: управление туловищем / статичное состояние |
| L2 + A | Фиксирование моторов, переход в положение стоя/лежа |
| L2 + B | Состояние демпфирования (расслабить моторы) |
| L2 + B, L2 + X | Восстановление после падения* |
| L2 + start | Режим бега |
| X кнопка | В режиме AI интелектуальная ходьба по лестнице |
| B кнопка | В режиме AI слепая ходьба по лестнице |
| start + double L1 | В режиме AI быстрый подъём по лестнице |
| start + double L2 | В режиме AI медленный подъём по лестнице |
| L1 + L2 + R1 + R2 + X | Переход в основной режим управления |
| L1 + L2 + R1 + R2 + B | Переход в AI режим |
* Перед восстановлением после падения проверьте, не мешают ли ноги робота друг другу. Если мешают — расслабьте моторы (L2 + B) и выставьте положение суставов в соответствии со стартовой позицией.
Управление B2 с мотор-колесами
Полный перечень команд управления:
| Комбинация | Описание |
|---|---|
| L2 + R2 + Start | Переключение в основной режим управления |
| B | Развести переднюю и заднюю пары колес в обычном режиме |
| L2 + R2 + Y | Переключение в AI режим управления на колесах |
| L1 + R1 + X | В режиме AI перейти в стойку на передние мотор-колеса |
| L2 + R2 + Y | Восстановление из стойки на двух колесах |
| L2 + B | Состояние демпфированния(расслабить моторы) |
| L2 + A | Переход между положениями стоя/лежа |
Общие проблемы и решения
Бывает, что робот B2 может работает ненормально. Большинство нештатных ситуаций имеют решения, пользователи не должны паниковать, сталкиваясь с ними. Если у вас есть вопросы, требуется обратиться к нашим инженерам в службу поддержки через портал ROBOHELP, они смогут оперативно ответить на любые интересующие вопросы.
Некоторые проблемы и их решения:
Самозащита после падения. При использовании официальной программы управления движением Unitree Robotics (спортивный режим, управление движением робота с помощью пульта) робот переходит в состояние самозащиты в случае падения, вызванного параметрами внешней среды (отсутствие трения и т.д) или неправильной эксплуатацией, двигатели робота автоматически переключатся в состояние торможения для защиты узлов робота. В этом случае нужно перезапустить робота, предварительно расположив в стартовую позицию.
Как выключить робота при выходе из строя пульта дистанционного управления. При выходе из строя пульта дистанционного управления (например, при его разрядке и т.д) возникает проблема выключения стоячего робота. Необходимо воспользоваться кнопкой питания аккумулятора, но в этом случае робот рухнет на землю. Поэтому при выключении робота необходимо придержать его за голову и хвост и медленно положить на землю.
Робот падает и не может стоять при включении. Не используется правильная начальная поза, что приводит к неправильному наклону корпуса. Перезапустите робота из правильного стартового положения.
Перевод робота в режим ожидания и малого энергопотребления. Для работы робота в течение длительного времени, переведите робота в лежачее положение и нажмите (нажмите клавиши L2 + B, чтобы войти в режим демпфирования). Это предотвратит падение робота при разряде аккумулятора!
Если робот отключается в процессе управления с достаточно заряженной батареей, нужно вытащить ее и вставить снова, затем запустить робота повторно (распространенная ошибка).
Upd by Artem P. 31.10.2024