Калибровка
Вашего робота сносит в сторону во время ходьбы?
- Проверьте начальное положение перед запуске робота
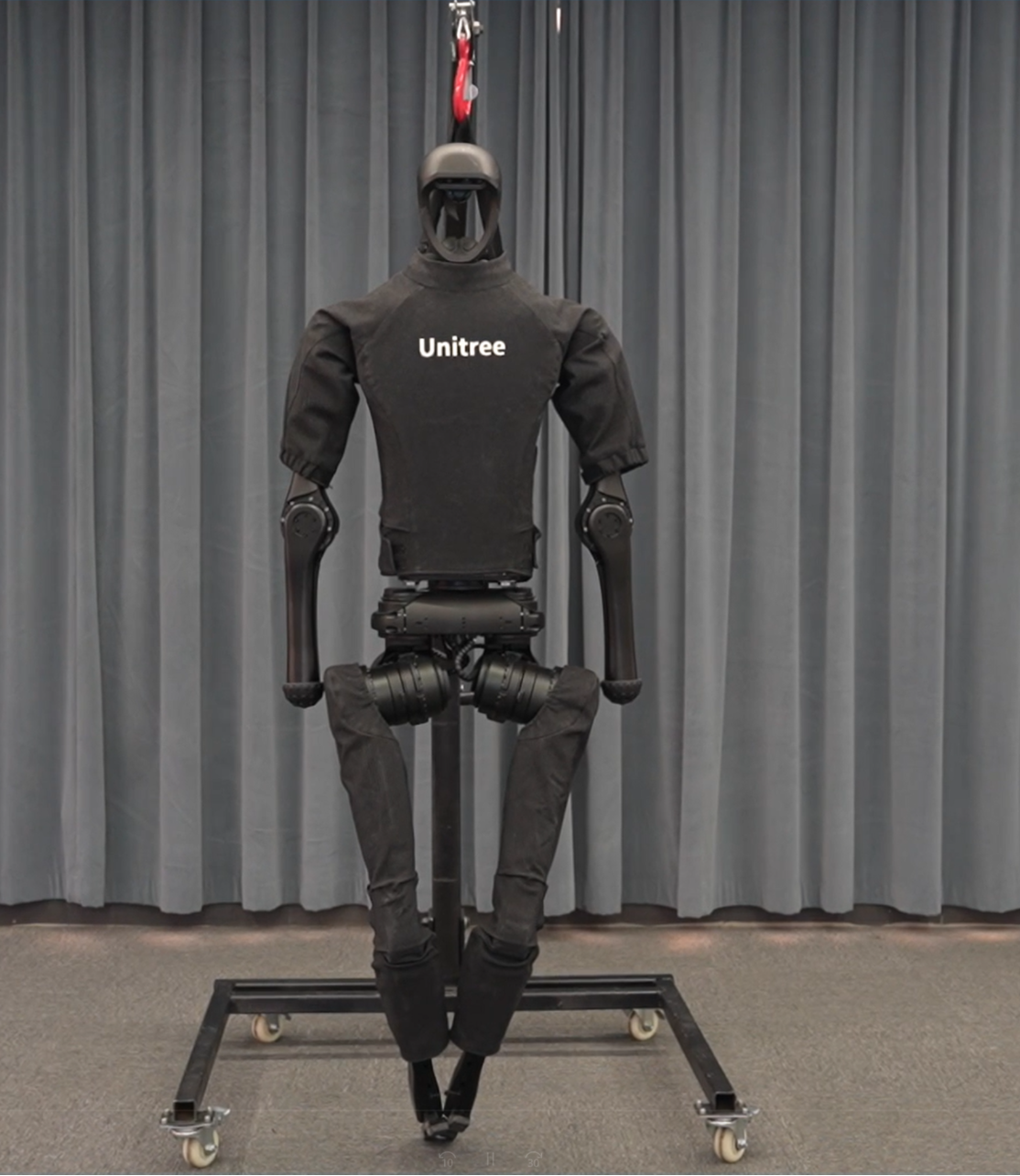
Руки опущены вниз и повернуты до упора внутрь

Мысок поднят максимально вверх, а пятка опущена вниз
- Проверьте лодыжки робота, если они слишком свободно болтаются - затяните
- Скорректируйте положение робота во время движения стрелками на пульте управления
- Откаллибруйте imu
Ваш робот после включения принимает неправильную позу?
- Проверьте начальное положение перед запуском робота
- Проверьте кабели соответсвующие неправильно расположенным суставам
- Откалибруйте моторы
Калибровка IMU
- Включите робота
- Подождите 2 минуты
- На пульте управления одновременно нажмите две клавиши L2 + R2.
- Держите тело робота вертикально и неподвижно, убедитесь, что тело вертикально по отношению к земле. Затем нажмите одновременно клавиши L2 + B.
- Нажмите одновременно две клавиши L1+ B.
- Перезапустите робота и попробуйте походить (пожалуйста, используйте страховочную раму)
Калибровка суставов
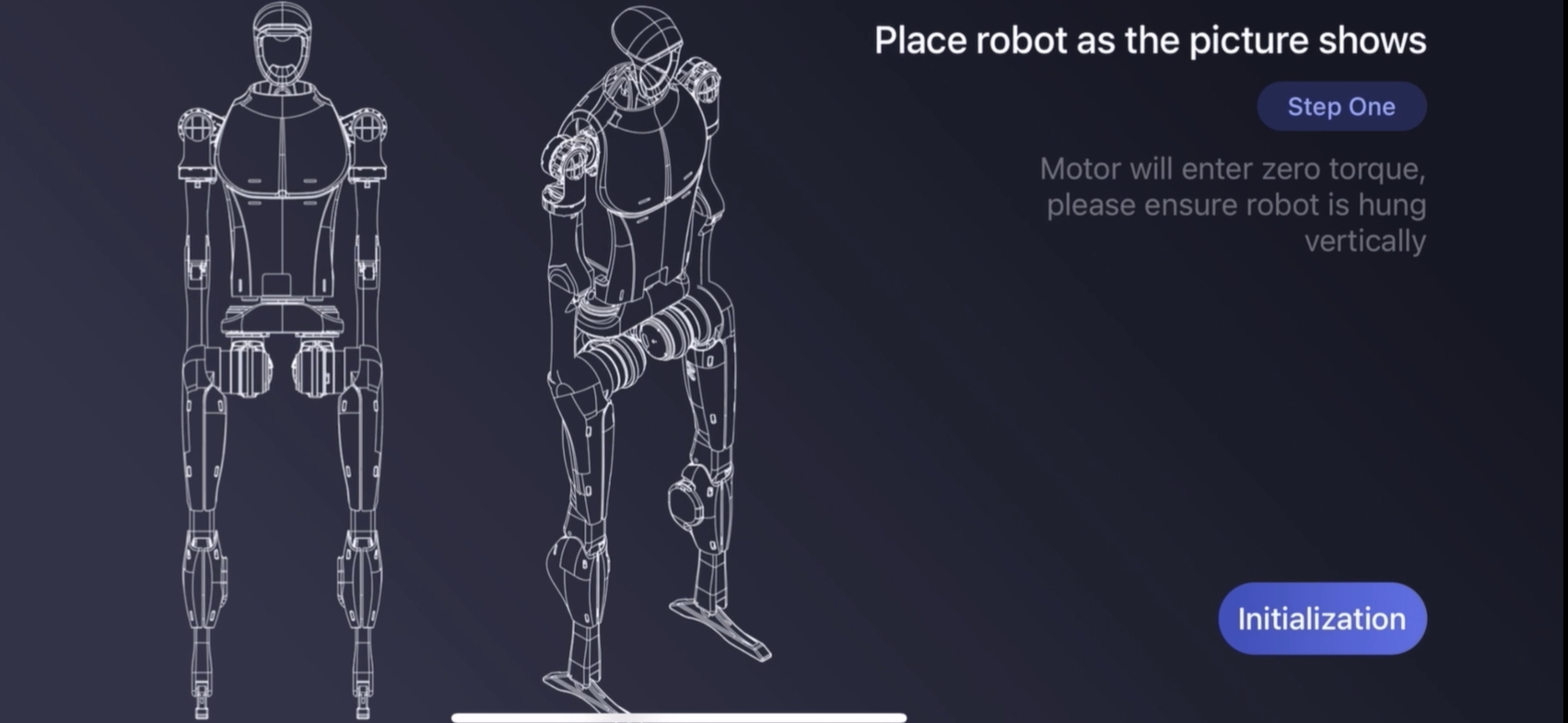
С новой версии программного обеспечения H1 от осени 2024 года калибровка суставов производится через приложение
- В [Device] -> [Data] -> [Robot] найти раздел [Calibration] и запустить калибровку моторов
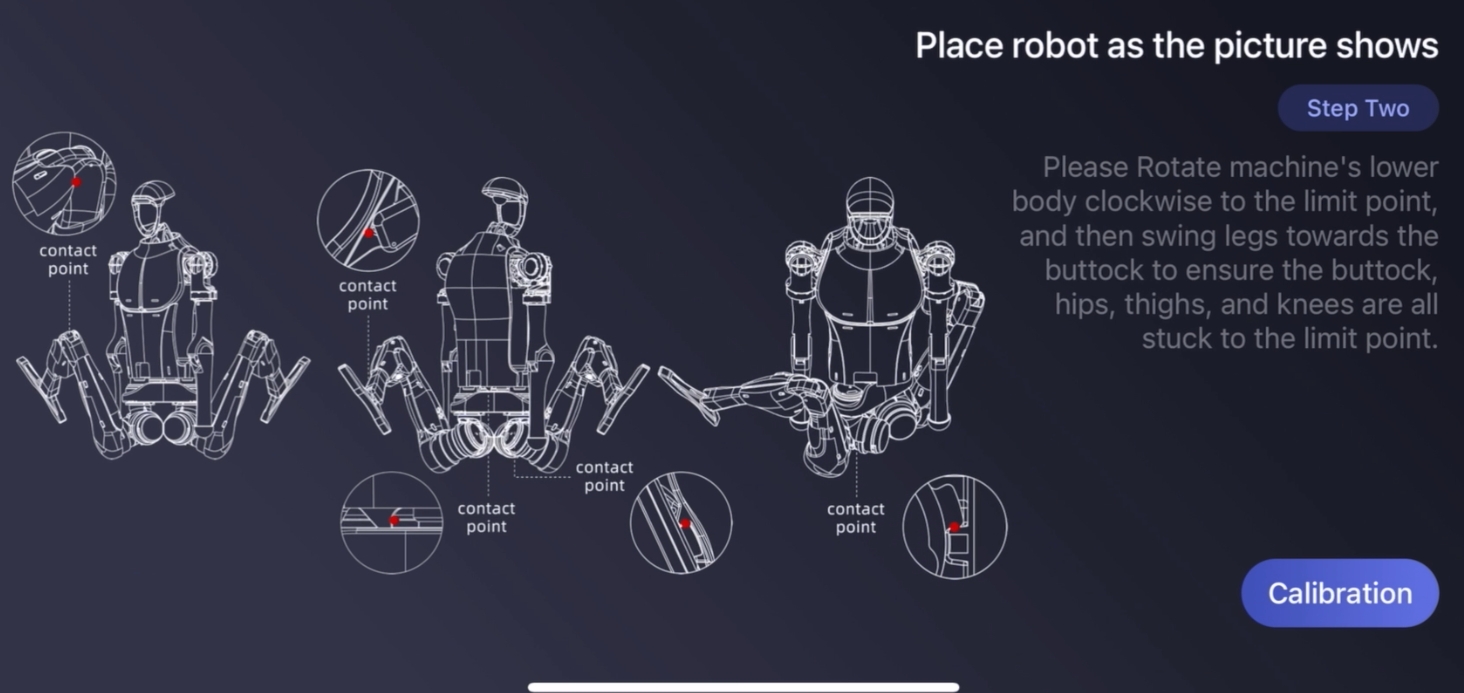
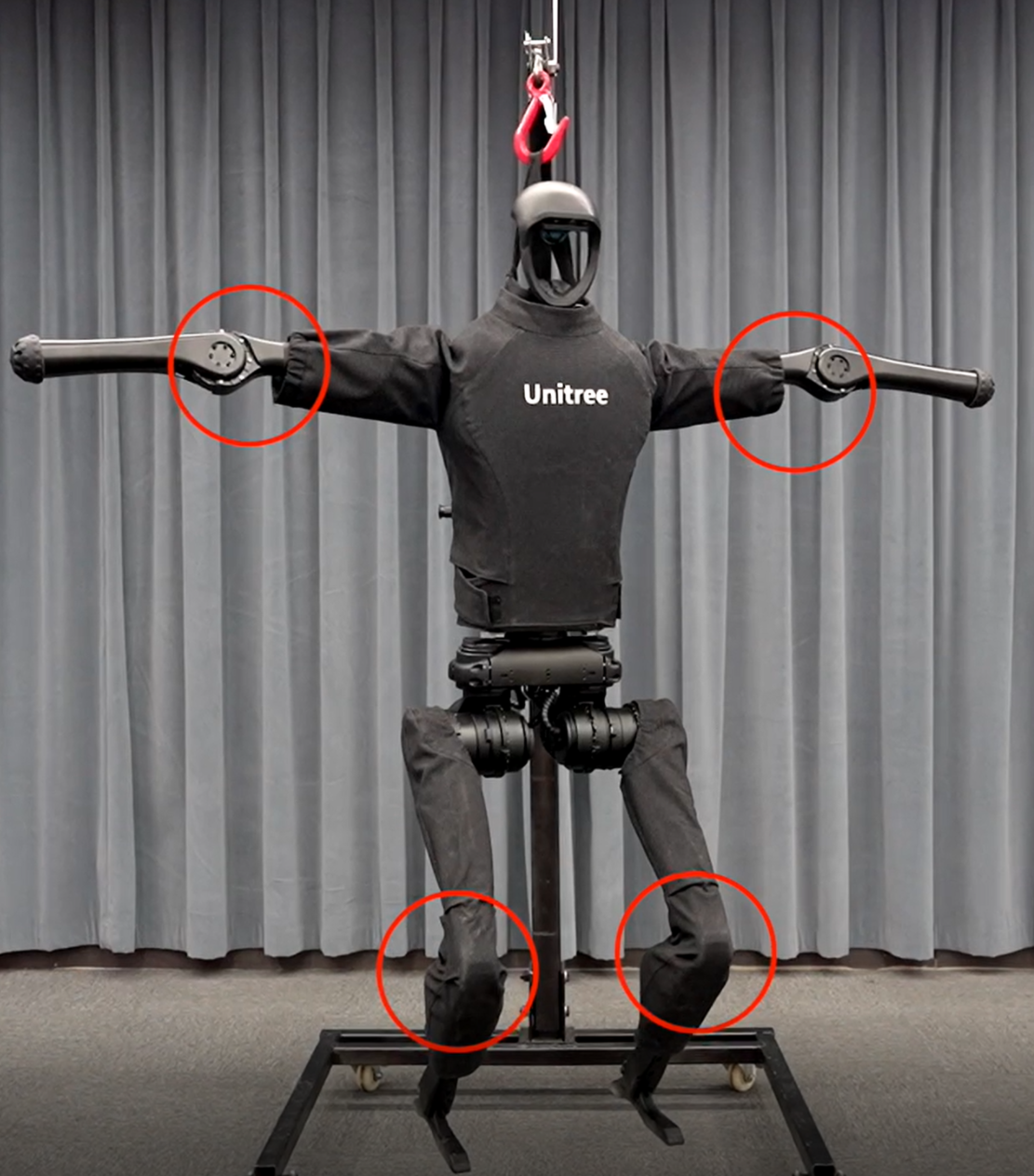
- Зафиксировать робота в следующих положениях и нажимать Calibrate
- Зафиксировать все моторы ниже таза до стопора по часовой стрелке
- Вернуть все моторы в нижнее положение, не поворачивая мотор таз-тело
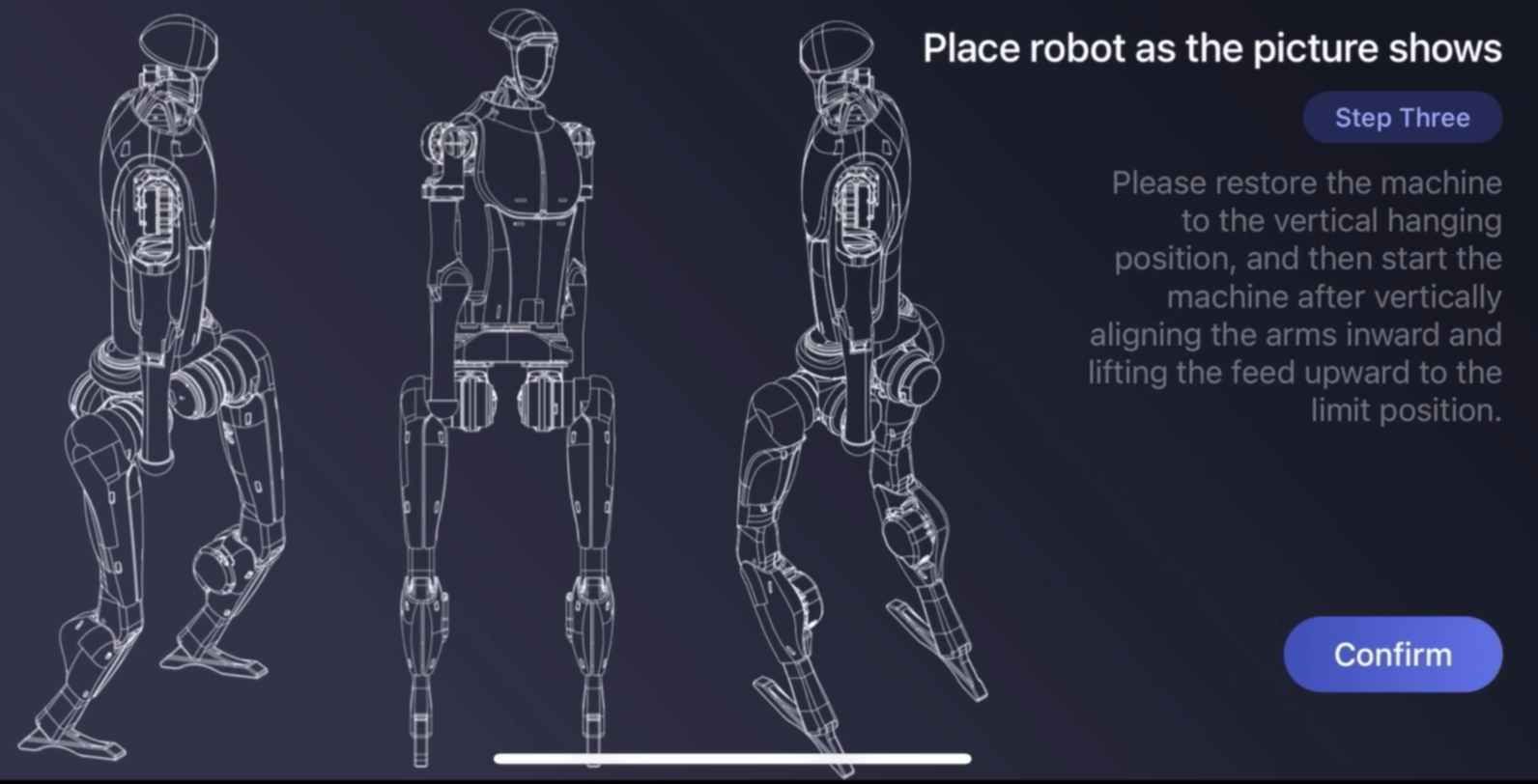
- После успешного завершения калибровки вы увидите следующее уведомление
- Перезапустите робота
Актуальную инструкцию в видеоформате изучите во вкладке [Guides] -> [Calibration] мобильного приложения *Unitree Explore
Проверка калибровки суставов
- Включите робота
- Нажмите одновременно две клавиши L2 + R2
- Нажмите одновременно две клавиши L2 + А ( робот будет поочердно принимать диагностические положения)
- Проверьте эффект, походив роботом (пожалуйста, используйте страховочную раму)
- При необходимости повторите процедуру
Upd by Artem P. 24.06.2025