Снятие логов
Основная плата управления в реальном времени постоянно отправляет поток отладочных данных, которые используются для диагностики. На спине робота AlienGo располагаются два диагностических разъема (RS-485). Подключаемся к тому из них, который расположен левее (если голова собаки располагается сверху):

Устройство (робособака) должно определиться как COM-порт. Любым терминалом (например putty) слушаем этот COM-порт.
Скорость: 115200
Формат кадра: 8-N-1
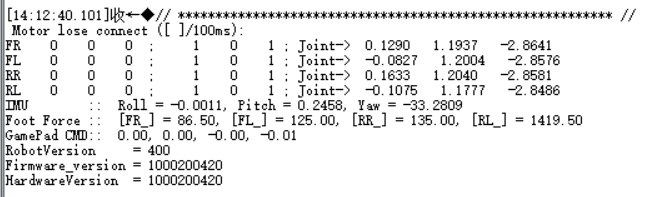
Пример вывода: