Быстрый старт
Данное руководство дает базовую информацию по эксплуатации робособаки модели Go2. Также необходимую вводную информацию можно получить из видеоинструкций в официальном приложении Unitree в меню GUIDE.
Начало работы
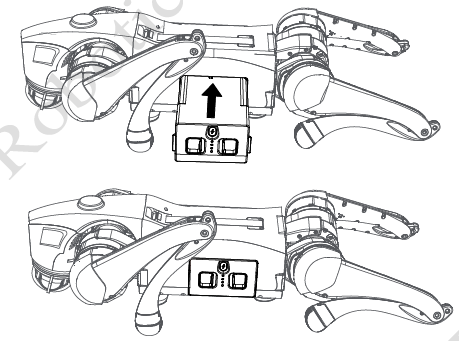
Положите Go2 на ровную поверхность и вставьте аккумулятор. Аккумулятор вставляется легким усилием и защелкивается. Если аккумулятор не вставляется легко, проверьте, правильно ли вы вставляете батарею, не перевернут ли он. Не делайте сильного нажима, чтобы не повредить порт батареи и разъем.
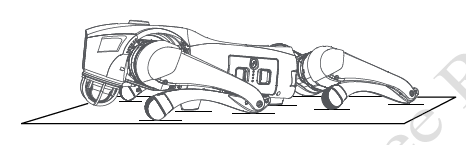
Положите робота в стартовую позицию: корпус лежит на земле горизонтально, без наклона, подставки на животе робота плотно прилегают к земле. Ноги робота собраны, как показано на рисунке ниже (четыре локтевых/коленных сустава и резиновые ступни должны касаться земли).
Обязательным пунктом на этапе эксплуатации служит предварительный внешний осмотр робота перед каждым включением на наличие дефектов: повреждение проводки, повреждение защищающих элементов корпуса, раскрученных винтов и прочих дефектов, отличающихся от первоначального вида робота (в случае обнаружения дефектов дальнейшая эксплуатация робота возможна, однако мы не сможем гарантировать дальнейшее обслуживание в рамках гарантийного договора).
В этом случае требуется обратиться к инженерам в службу поддержки в чате, они смогут оперативно ответить на любые интересующие вопросы.
Для включения робота необходимо провести следующие действия:
- Запуск робота: одно короткое нажатие на кнопку питания на аккумуляторе, второе нажатие длинное - порядка 5 секунд. Результатом успешного включения является характерный звук и индикация робота. При включенном аккумуляторе светодиоды постоянно горят зеленым цветом и являются индикатором уровня заряда.
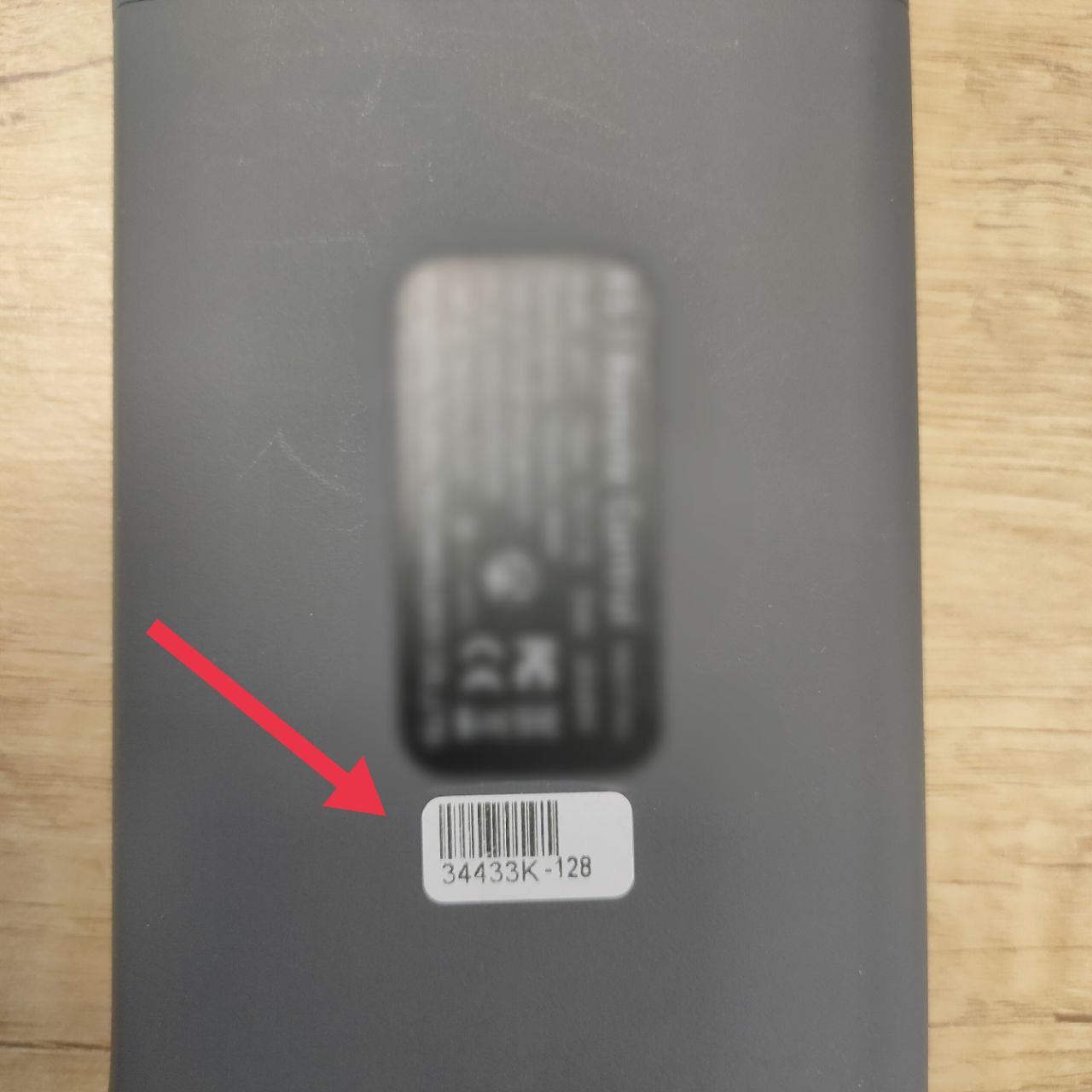
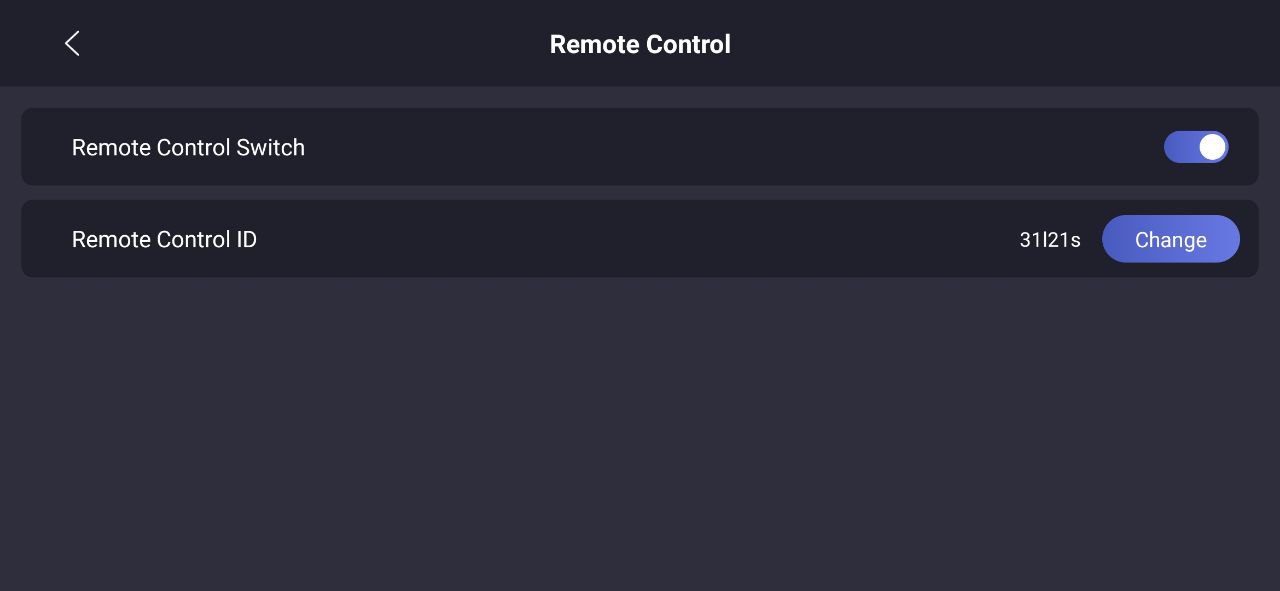
- Включение пульта: одно короткое нажатие и одно длинное (порядка 5 секунд, до характерного звукового сигнала). Пульт автоматически привязывается к роботу, если номер на этикетке указан в приложении во вкладке [Device]->[Data]->[Remote Control Binding].
При успешном подключении все светодиоды на левом торце пульта должны гореть. Светодиод DL не должен перемигивать.
- Автоматический подъем робота на выпрямленные лапы означает, что все системы на роботе запущены.
Категорически запрещаются любые попытки произвести какое-либо действие с роботом после запуска и до того, как он сам встанет на лапы.
Перед подъемом робот проводит самодиагностику. При неудачном ее завершении робот не встанет. В этом случае, в первую очередь необходимо еще раз проверить положение робота на соответствие со стартовой позицией и проверить статус связи моторов робота через приложение.
Так же возможен случай, когда самостоятельный подъем был отключен программно. Разрешается провести попытку принудительного подъема комбинацией: Двойное нажатие
L2+A
Регистрация и подключение к роботу
В начале необходимо с официального сайта скачать приложение Unitree Go2.
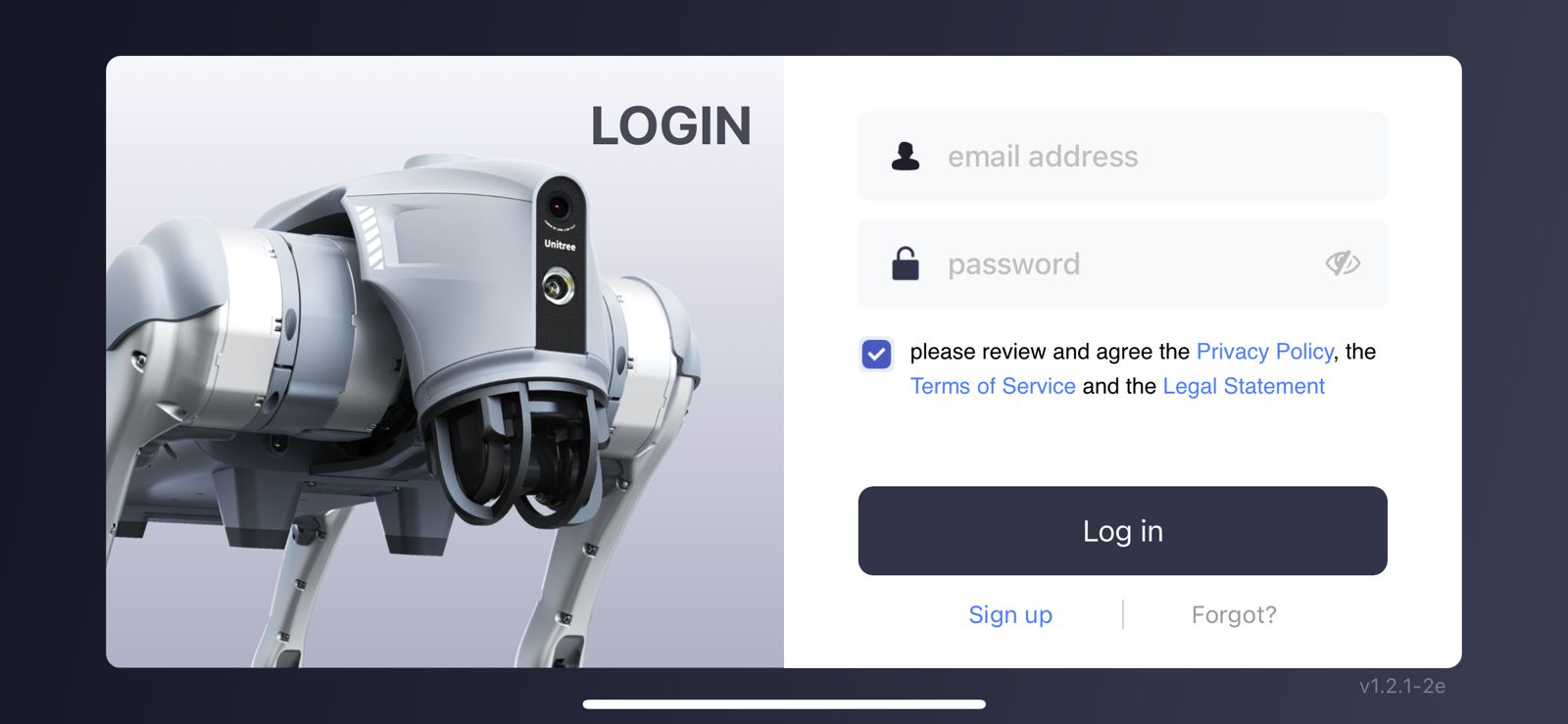
После этого зайдите в приложение создайте свой аккаунт для привязки робота. Поставьте галочку напротив текста: please review and agree the Privacy Policy, the Terms of Service and the Legal Statement, и нажмите Sign up.
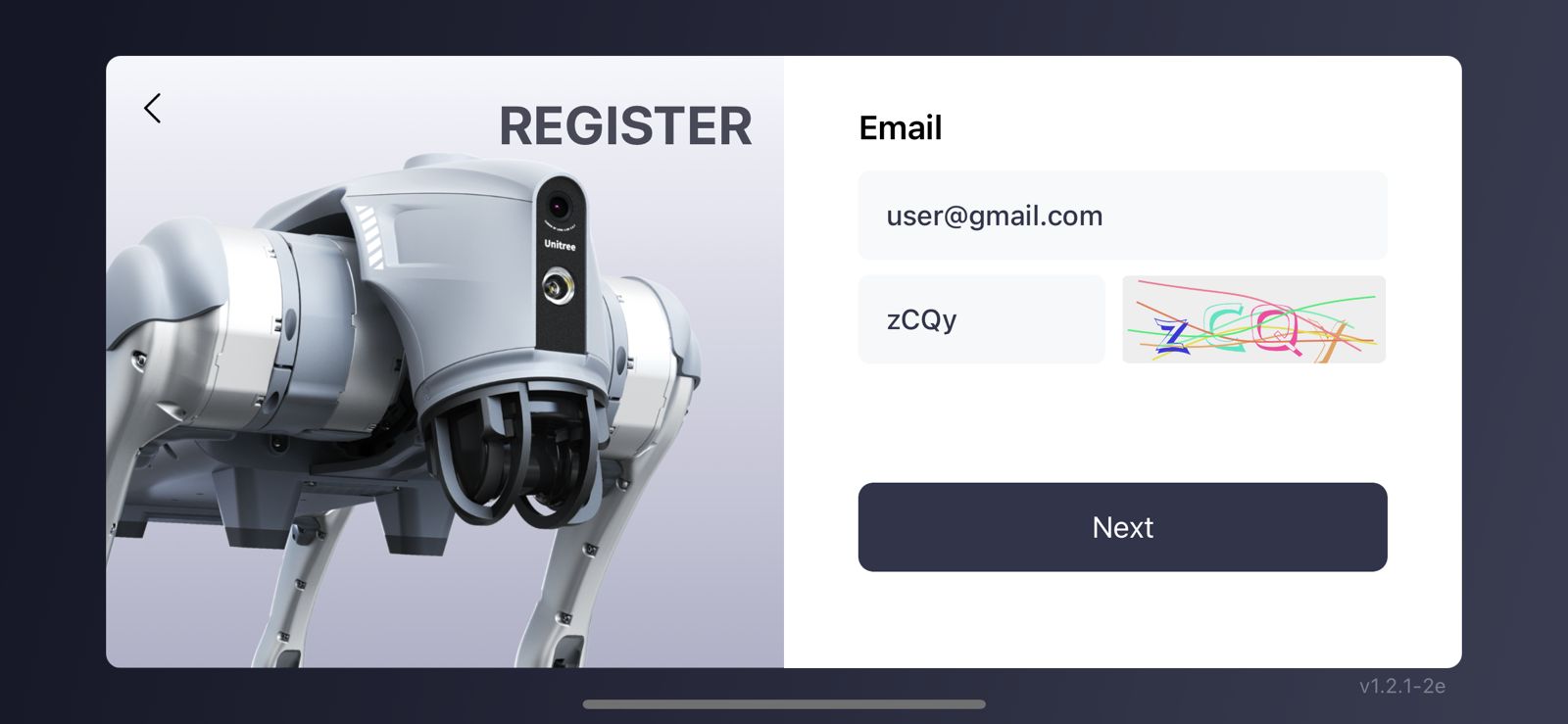
Введите ваш email и код с картинки.
Рекомендуем не использовать доменные и корпоративные почтовые адреса и при создании аккаунта отдать предпочтение почтовым ящикам @gmail.com.
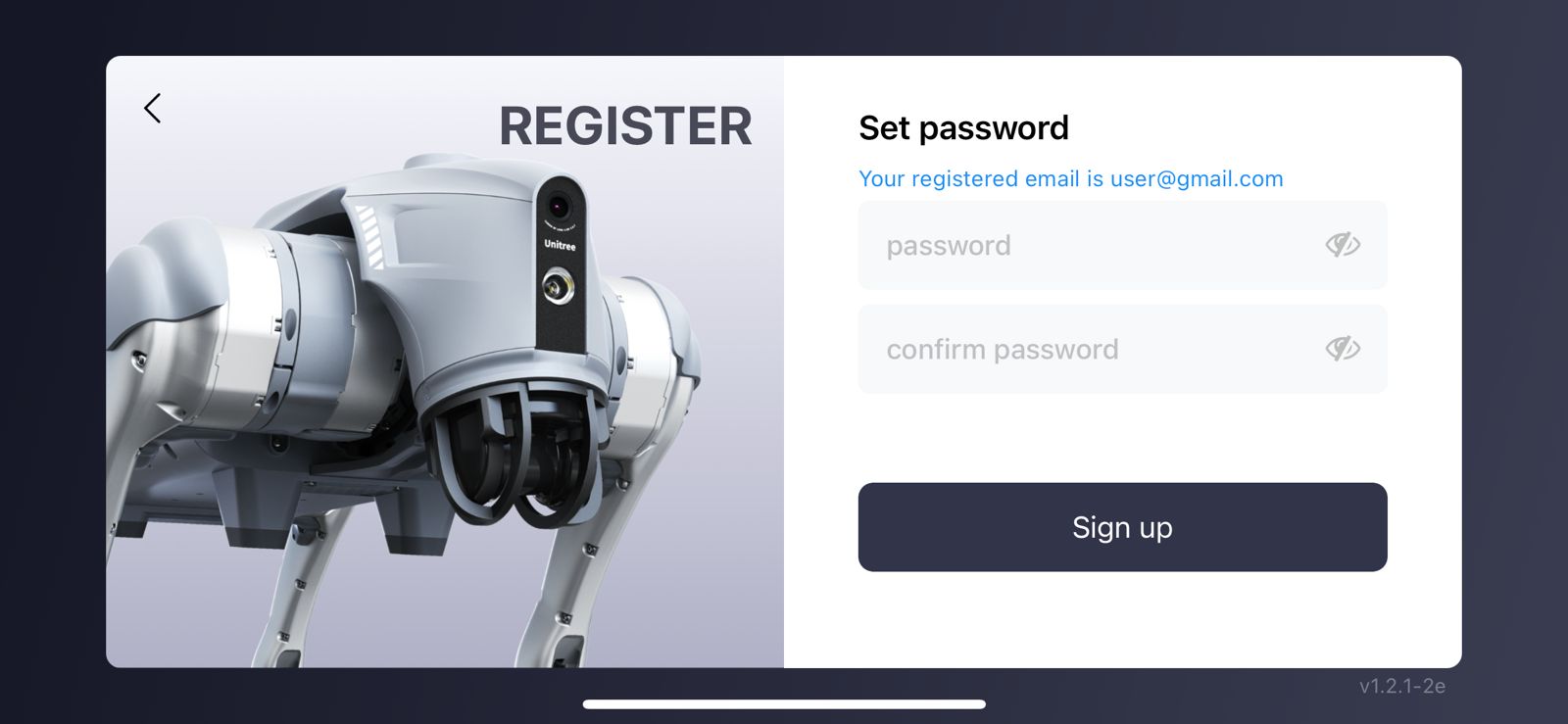
Установите пароль на латинице для вашего аккаунта.
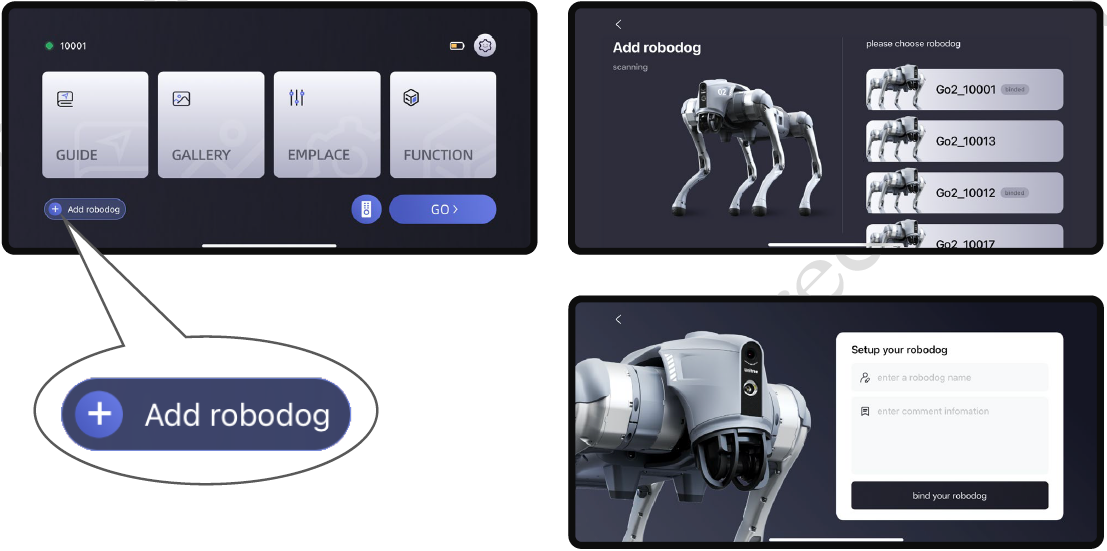
Войдите в Ваш аккаунт и нажмите Add robodog. Выберите вашего Go2 из списка. Введите имя вашего робота.
Нажмите reconnect, если соединение отсутствует.
Режимы
Робот может находиться одном из двух глобальных режимов:
- стандартом
- спортивном
Стандартный режим используется при разработке программного управления на низком уровне (управление моторами), а также для калибровки. Не используйте ручное управление с пульта в этом режиме, так как робот будет неустойчив.
Спортивный режим представляет собой официальную программу движением от производителя. В этом режиме достигается максимальная устойчивость и подвижность. Он используется для ручного управления собакой с пульта, а также при разработке программного управления на высоком уровне (движение вперед, назад и т.д).
После включения робот сразу активирует Спортивный режим. Обычный пользователь всегда использует продукт в этом режиме. Стандартный режим используется разработчиками при необходимости управлять каждым мотором по отдельности и программирования своей походки.
Весь демо-функционал (режим бега, режим следования, подача лапы, растяжка и т.д), запускающийся при помощи пульта или приложения, является возможностями и подрежимами Спортивного режима.
Обновление 1.15
Начиная с версии прошивки 1.15 переключение глобальных режимов было упразднено в угоду большей удобности и программной адаптивности. Теперь режимы представляют три походки:
- Agile Запускается по умолчанию и представляет из себя бывший AI mode с возможностью выполнять любые действия и движения из стандартного General mode. При падении робот будет пытаться восстановиться.
- Endurance Энергоэффективная походка, однако при выполнении развлекательных действий переключается на Classic gait и потом обратно.
- Classic gait Обычная походка, при падении суставы блокируются
Все походки теперь обладают функционалом обхода препятствий. Высота стойки, Высота подъема лап, Скорость бега теперь устанавливается глобально для всех походок из меню More Function в Go, для перехода в меню нажмите три точки справа сверху находять в Go
Управление роботом с большого пульта
Пульт - это дополнительный аксессуар, который идет в комплект к роботам с возможностью вторичной разработки Edu и Edu Plus,
- После включения робот автоматически переходит в спортивный режим, самостоятельно встает и находится в подрежиме статичного состояния.
- Нажмите
SELECT, чтобы перейти в режим управления туловищем, после чего вы можете управлять положением корпуса с помощью стиков. - Нажмите
START, чтобы перейти в режим ходьбы. В это время вы можете использовать джойстик для управления роботом: движения вперед и назад, сдвигаться из стороны в сторону, поворачиваться на месте и т.д. Если вы не двигаете стики, робот перестанет двигаться. - В режиме ходьбы нажмите
→ + A, чтобы переключиться в режим подъема по лестнице. В этом режиме высота подъема лап увеличивается и робот может преодолевать препятствия и подниматься по лестнице. Вернуться обратно в режим ходьбы можно нажатиемStart. - В любом состоянии нажмите
L2 + A, чтобы заблокировать робота (фиксирование моторов), и нажмитеSTART, чтобы разблокировать робота. - Когда робот заблокирован, продолжайте использовать комбинацию
L2 + Aчтобы робот ложился и вставал обратно. - В любом режиме используйте комбинацию
L2 + Bдля того ввести робота состояние демпфирования (состояние пониженного энергопотребления). В этом состоянии моторы как бы “расслабляются”. Если робот стоял, то он плавно ляжет под собственным весом (но не рухнет, как если бы убрать питание совсем). Настоятельно рекомендуется входить в состояние демпфирования уже находясь в положении лежа, так как все равно имеет место столкновение с землей средней силы. НажмитеL2 + A, чтобы выйти из состояния демпфирования.
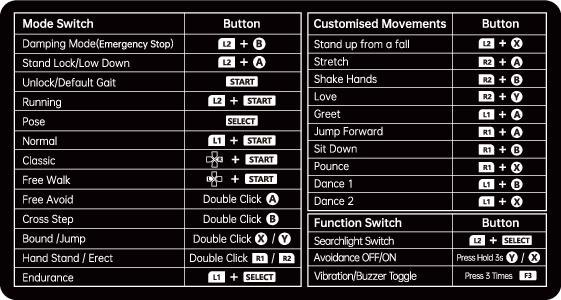
Полный перечень команд управления до версии 1.15:

Обновленный полный перечень команд управления для версии 1.15
Актуальные команды можно всегда посмотреть в разделе [Guide]->[User Manual]->[Remote Control Section]
Голосовые команды
Модели модификации Pro и Edu/Edu Plus имеют встроенный голосовой модуль. Вы можете использовать следующие голосовые команды для управления:
| Команда | Ответ | Действие |
|---|---|---|
| Hey Benben | I’m here. | |
| Turn up the sound | Yes sir. | Прибавить звук |
| Turn down the sound | OK sir. | Убавить звук |
| Show me a dance | OK, let’s dance! | Начать танец |
| Wiggle Butt | As you wish. | Двигать задом |
| Bow with hands | Wish you good luck! | Встать и поклониться |
| Lock | Yes, sir. It’s done. | Заблокировать суставы |
| Unlock | OK, now I can move. | Разблокировать суставы |
| Move forward | No problem. | Разблокироваться и двигаться вперед 2сек |
| Climbing mode | I’m climbing now. | Включить режим ходьбы по лестнице |
| Running mode | I’m the Flash. | Включить режим бега |
| Turn on obstacle avoidance | Yes sir. | Включить режим обхода перпятствий |
| Turn off obstacle avoidance | No problem | Выключить режим обхода препятствий |
| Roll over | I’m rolling | Перевернуться |
| Stretch yourself | What a sunny day! | Начать растяжку |
| Shake hand | OK sir | Подать лапу |
| Lie down | I‘m tired/I’m sleepy | Лечь |
| Stand up | Let’s go! | Встать |
Для работы голосовых команд требуется включение соответсвующей функции в приложении Unitree Go(По умолчанию: включено) 
Если робот в фоне вашего разговора периодически распознает команду “Hey Benben” и отвечает “I’m here” , рекомендуется отключить функцию голосового управления в приложении для предотвращения повреждения робота
Поясной брелок
Поясной UWB пульт-брелок - это аксессуар для включения встроенной функции “попутчик” в роботах моделей Go2 Pro
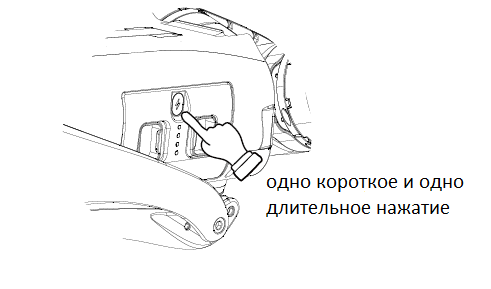
Включите поясной брелок одним коротким и одним длинным нажатием [Кнопки Питание] на передней панели брелка под стиком.
Для корректной работы функции “Попутчик” необходимо правильно закрепить пульт-брелок на поясе: модуль UWB, расположенный в голове робота, ориентируется в пространстве относительно этого пульта. Пульт имеет собственную систему координат: ось X направлена перпендикулярно от его передней панели с кнопками и джойстиком, ось Y соответствует поперечному направлению, а ось Z является вспомогательной и направлена вдоль антенны. Робот принимает за свой курс направление по оси X пульта. При активации функции робот постоянно стремится совместить свою ориентацию в плоскости XY с ориентацией пульта. Поэтому для правильной работы пульт-брелок должен быть закреплен на поясе клипсой, расположенной сзади по центру корпуса пульта-брелка, чтобы его ось X была направлена вперед по ходу движения, а не в сторону или под углом. Наклон пульта вдоль оси Z не оказывает критического влияния на работу функции.
Быстро нажмите [Кнопку M] дважды на передней панели брелка для включения функции; робот произнесет accompany mode activated и светодиод на голове загорится фиолетовым.
Для включения обхода препятсвий во время работы функции “Попутчик” быстро нажмите [Кнопку L] дважды.
Для выхода из функции используйте одно короткое нажатие соответствующей кнопки.
Не позволяйте поясному брелку полностью разрядиться: пытайтесь поддерживать уровень заряда выше 70% при длительном хранении.
Не храните на холоде.
Рекомендации
-
Перед восстановлением после падения проверьте, не мешают ли конечности робота друг другу. Если мешают — расслабьте приводы двойным нажатием
L2 + Bи выставите положение суставов в соответствие начальному положению. -
Настоятельно рекомендуется воздержаться от слишком частого использования сложных трюков, например таких как танец. Это может привести к ускоренному износу резиновых лапок робота, а также снизить срок эксплуатации используемой батареи
-
При выполнении команд c пульта, где действие указано комбинацией клавиш, необходимо зажимать первую клавишу, и не отпуская ее, нажимать вторую из комбинации
-
Рекомендуется проверять температуру моторов и приводов робота каждые 2 часа активной эксплуатации. В случае сильного нагрева рекомендуется отключить робота до достижения оптимальной температуры моторов
Upd by Igor P. 03.09.2024
Upd by Artem P. 10.06.2025