Данное руководство дает базовую информацию по эксплуатация робота модели G1 и является общим для всех модификаций
Запуск робота
Включение и установка/извлечение аккумулятора
Каждый аккумулятор робота оснащается собственной BMS для управления зарядом и емкостью с диагностикой и нормализацией циклов зарядки и разрядки. Индикация заряда аккумулятора из комбинаций разных режимов светодиодов, для проверки уровеня заряда аккумулятора одиночным коротким нажатием на кнопку включения:
- 4 светодиода горят постоянно — ~100% (максимальный заряд)
- 4-й светодиод мигает, остальные 3 горят — ~87-100% (начало разряда, переход к следующему уровню)
- 3 светодиода горят постоянно (4-й погас) — ~75-87% (высокий уровень заряда)
- 3-й светодиод мигает, 2 и 1 горят — ~62-75% (переход к среднему уровню)
- 2 светодиода горят постоянно (3-й погас) — ~50-62% (средний уровень заряда)
- 2-й светодиод мигает, 1 горит — ~37-50% (переход к низкому уровню)
- 1 светодиод горит постоянно (2-й погас) — ~15-37% (низкий заряд, требуется подзарядка)
- 1-й светодиод мигает — ~0-15% (критический уровень, аккумулятор почти разряжен)
Будьте внимательны, роботы Unitree, включая модели G1, H1 и Go2, используют аккумуляторы схожего форм-фактора, что может ввести пользователей в заблуждение. Однако их электрические характеристики критически различаются! Установка неправильного аккумулятора может привести к выходу из строя управляющей платы как самого аккумулятора, так и робота в целом. Данное действие аннулирует гарантию по причине нарушения условий эксплуатации.
Храните аккумуляторы для G1 отдельно и не используйте аккумуляторы от других моделей, даже если они физически подходят.
Установка аккумулятора
Вставьте в отсек под левой рукой робота G1 полностью заряженный аккумулятор кнопкой включения ближе к спине робота. Если аккумулятор не вставился полностью, во-первых, убедитесь, что Вы вставляете его правильной стороной, во-вторых, вытяните аккумулятор на 2 см от защелок, не трогая защелок и не прикладывая усилий резким движением толкните аккумулятор до характерного щелчка. 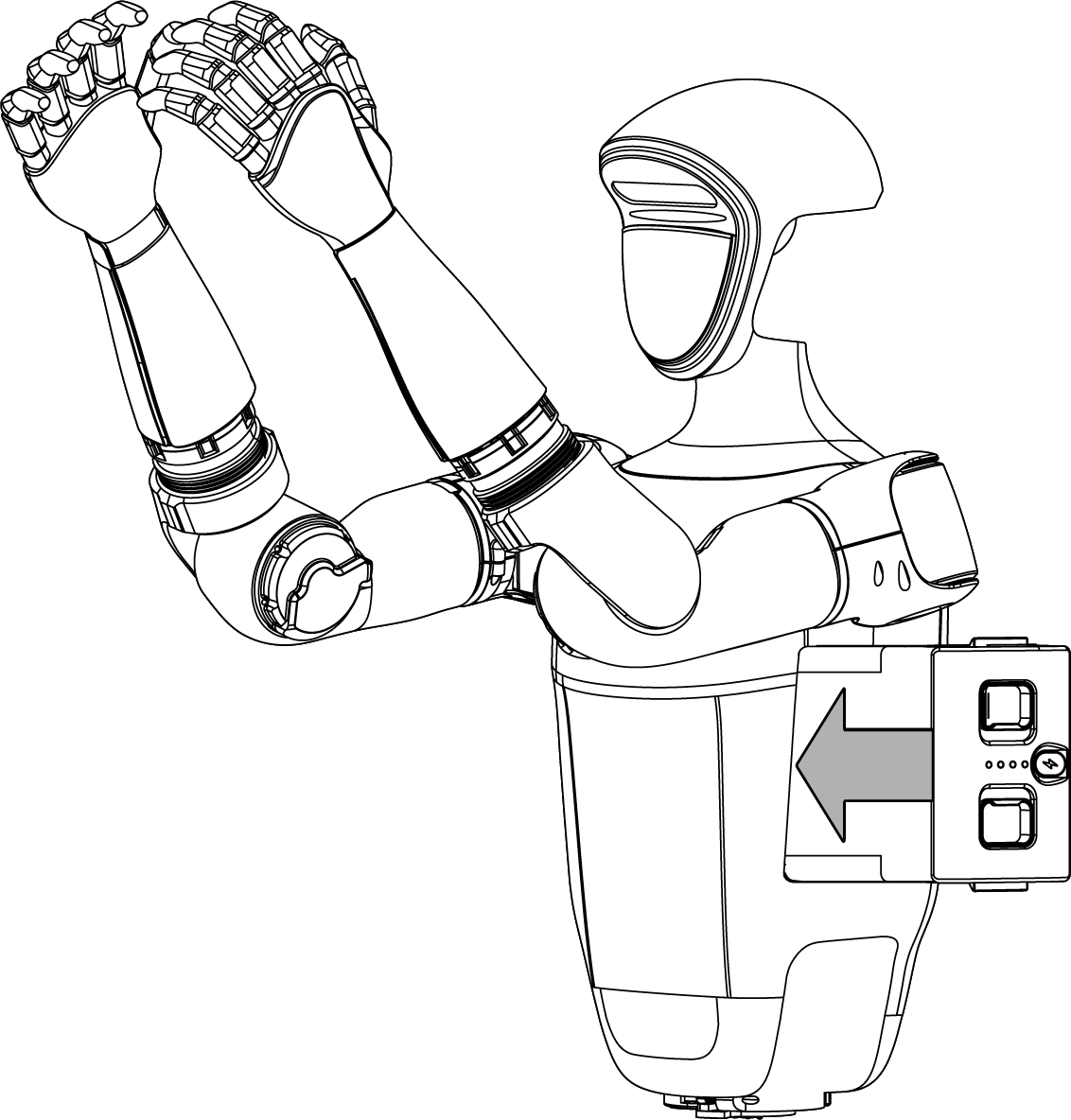
Извлечение
Для извлечения аккумулятора из робота поднимите левую руку и держа ее нажмите на две защелки и притяните их к центру, при нормальной эксплуатации аккумулятор должен сам вытолкнуться из отсека, если же это не произошло, просто вытяните его. 
Первый запуск робота
Особенность первого запуска версии с расширенным количеством степеней свобод(27DOF основных) состоит в обязательной преднастройке через мобильное приложение Unitree Explore.
-
Создайте аккаунт или войдите в уже существующую учетную запись Unitree
- Подключитесь к вашему роботу
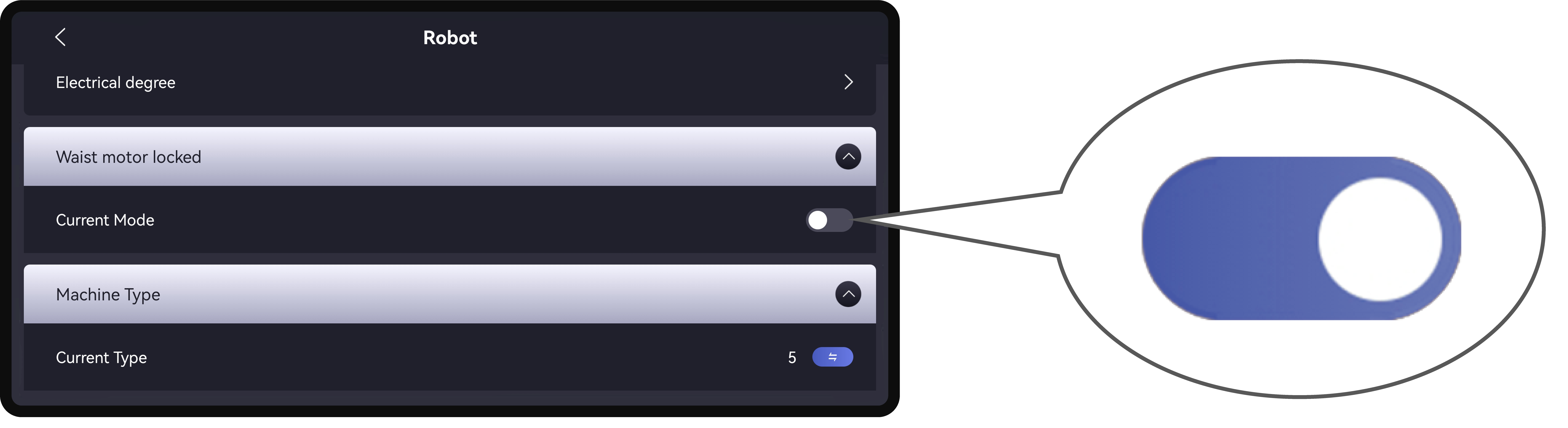
- Перейдите в настройки робота [Device] -> [Data] -> [Robot] и снизу найдите настройку Waist motor locked
Использование фиксатора талии
Фиксатор талии служит для ограничения числа степеней свобод робота в области талии, что может быть полезно для уменьшения влияния паразитных сочленений в кинематической схеме, в том случае, если они не будут использоваться в дальнейшей работе. Фиксатор талии входит в базовый комплект вместе со всем необходимым для установки крепежем и инструментом
- Для установки возьмите часть с отверстиями для монтажа на лицевой стороне, наклоните торс G1 назад и вставьте первую часть фиксатора в соотвествии со следующим изображением
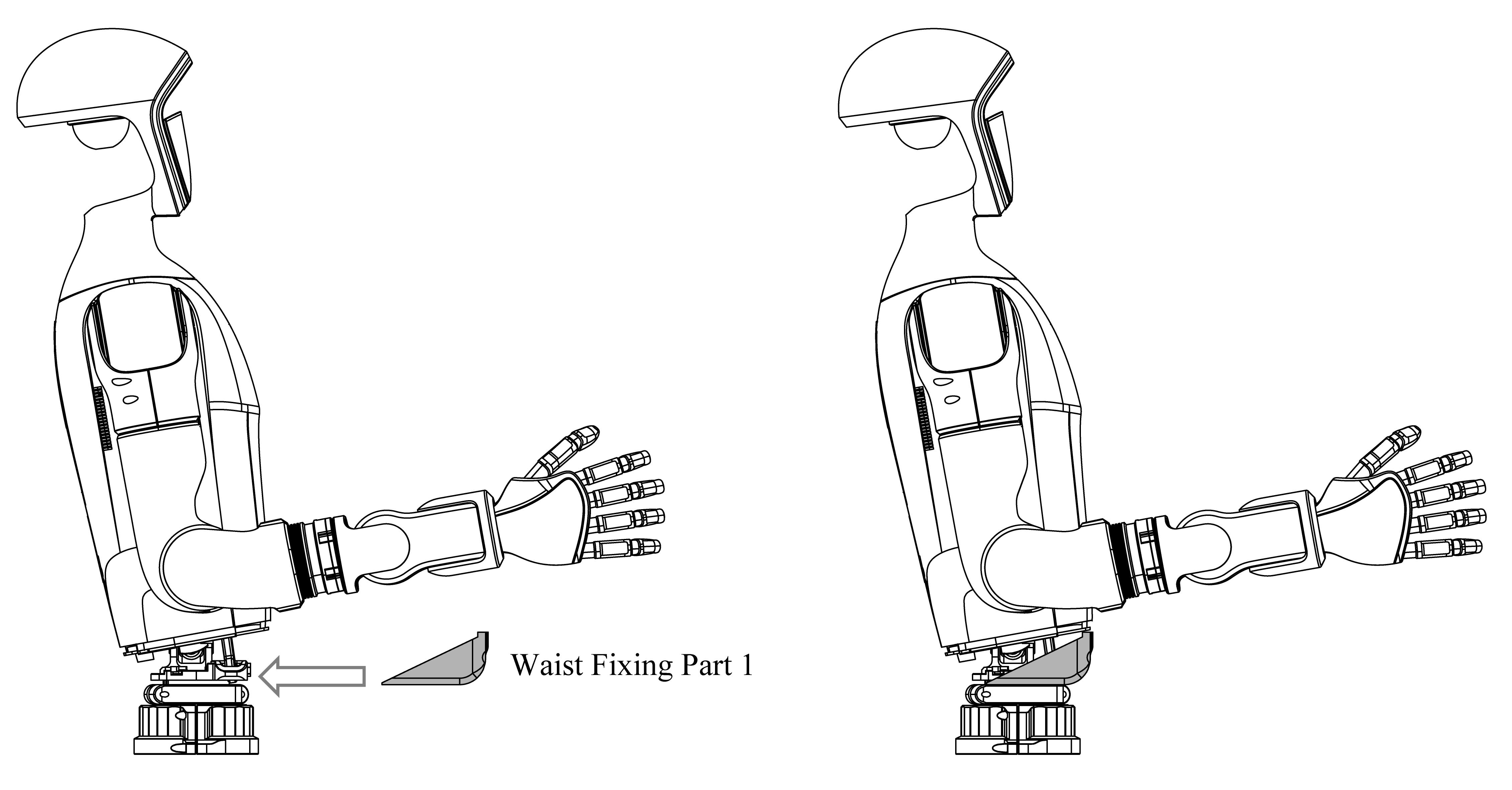
- После, возьмите ответную вторую часть и ,наклонив торс G1 вперед совместите обе части в соотвествии с изображением ниже
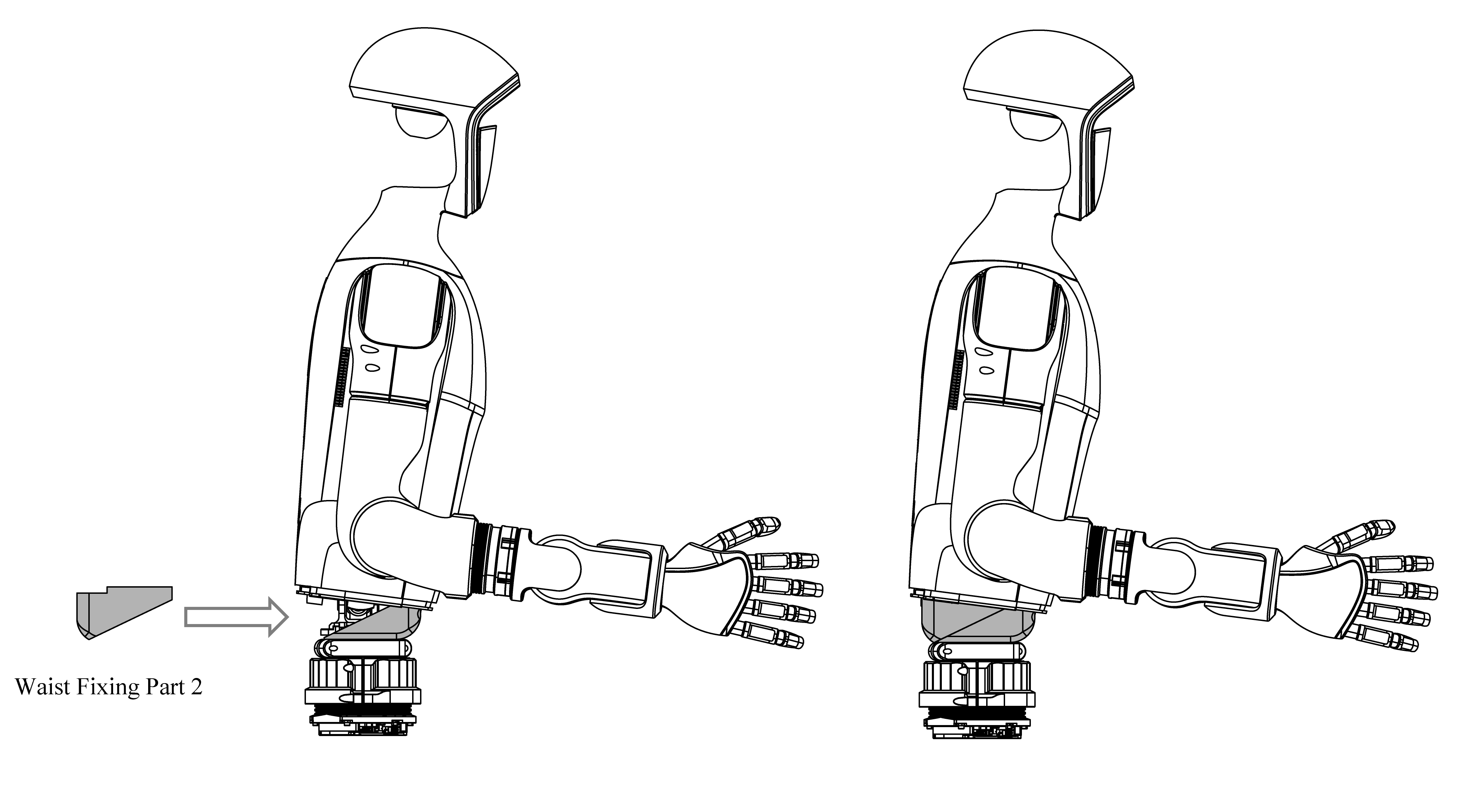 При установке внимательно следите, чтобы не зажать в месте стыка силовые кабеля идущие из торса к тазу
При установке внимательно следите, чтобы не зажать в месте стыка силовые кабеля идущие из торса к тазу - Выпрямите робота и закрепите фиксатор с помощью комплектных винтов M5
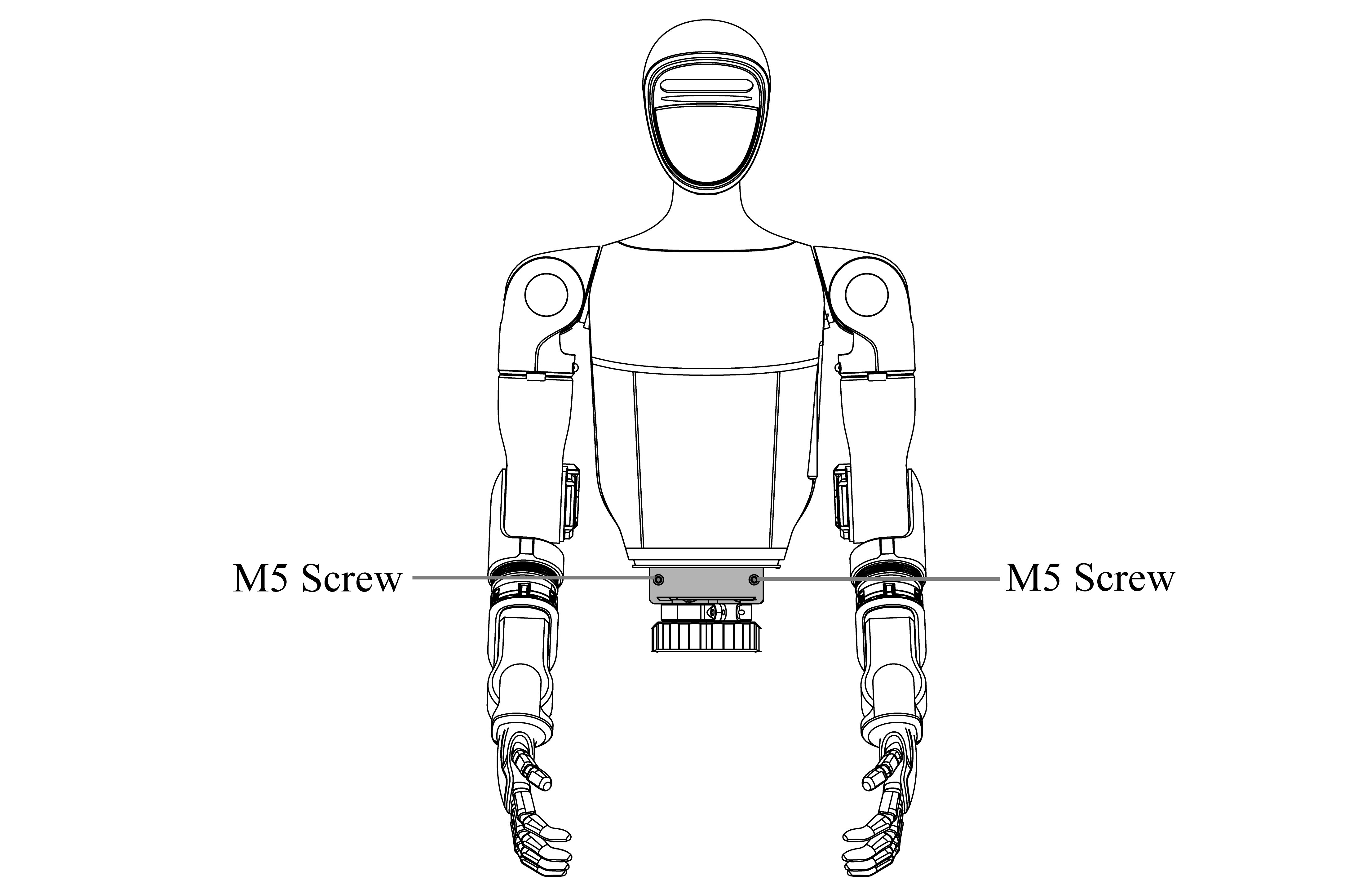
- Перед подачей команд после запуска убедитесь в правильности настройки “Waist motor locked” в приложении [Settings] - [Robot]. При установленом фиксаторе талии данная настройка должна быть в положении Включено.
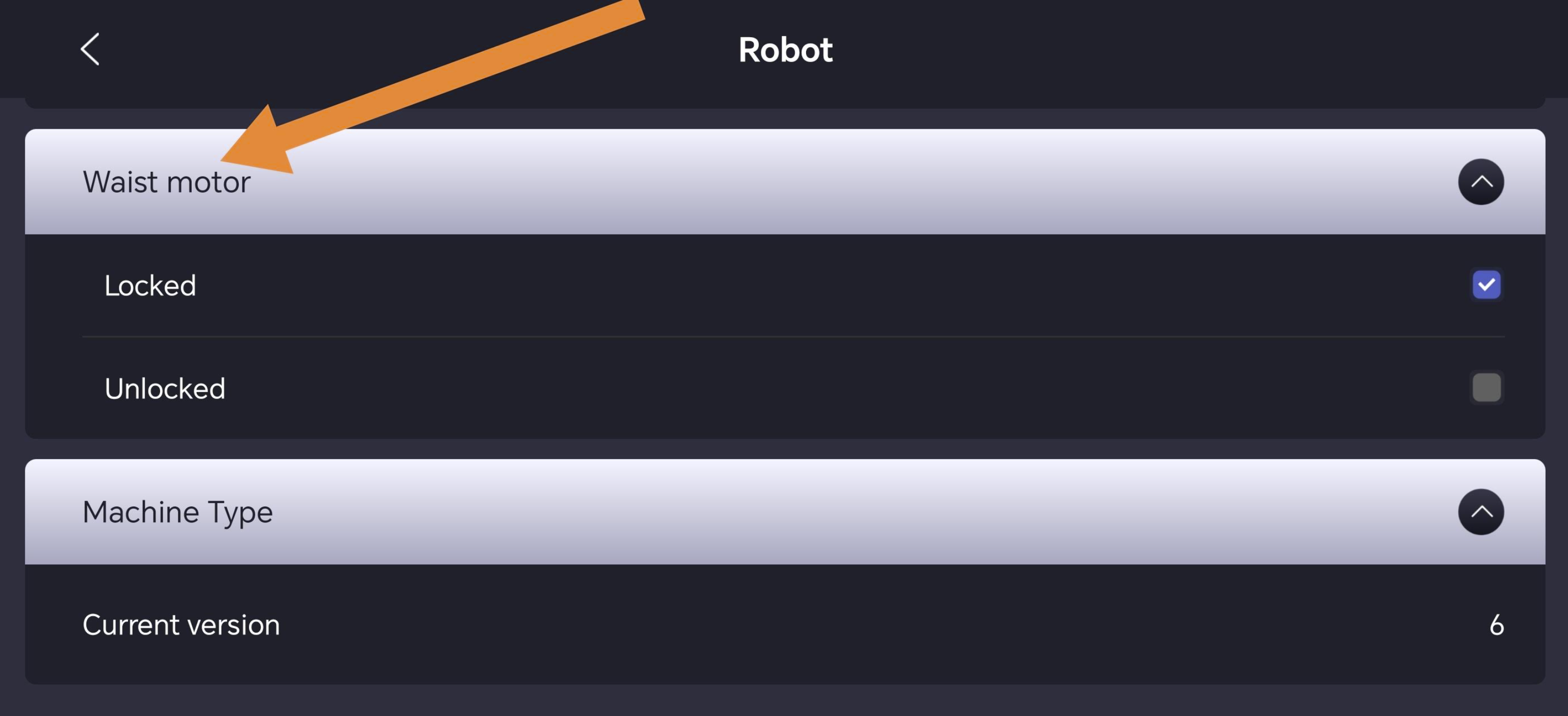
Обновление
В недавнем обновлении приложения в данную настройку внесли больше ясности разделив ее на два более понятных чекбокса: Locked, который следует выбирать в случае установленного фиксатора и Unlocked при отсутсвии фиксатора.
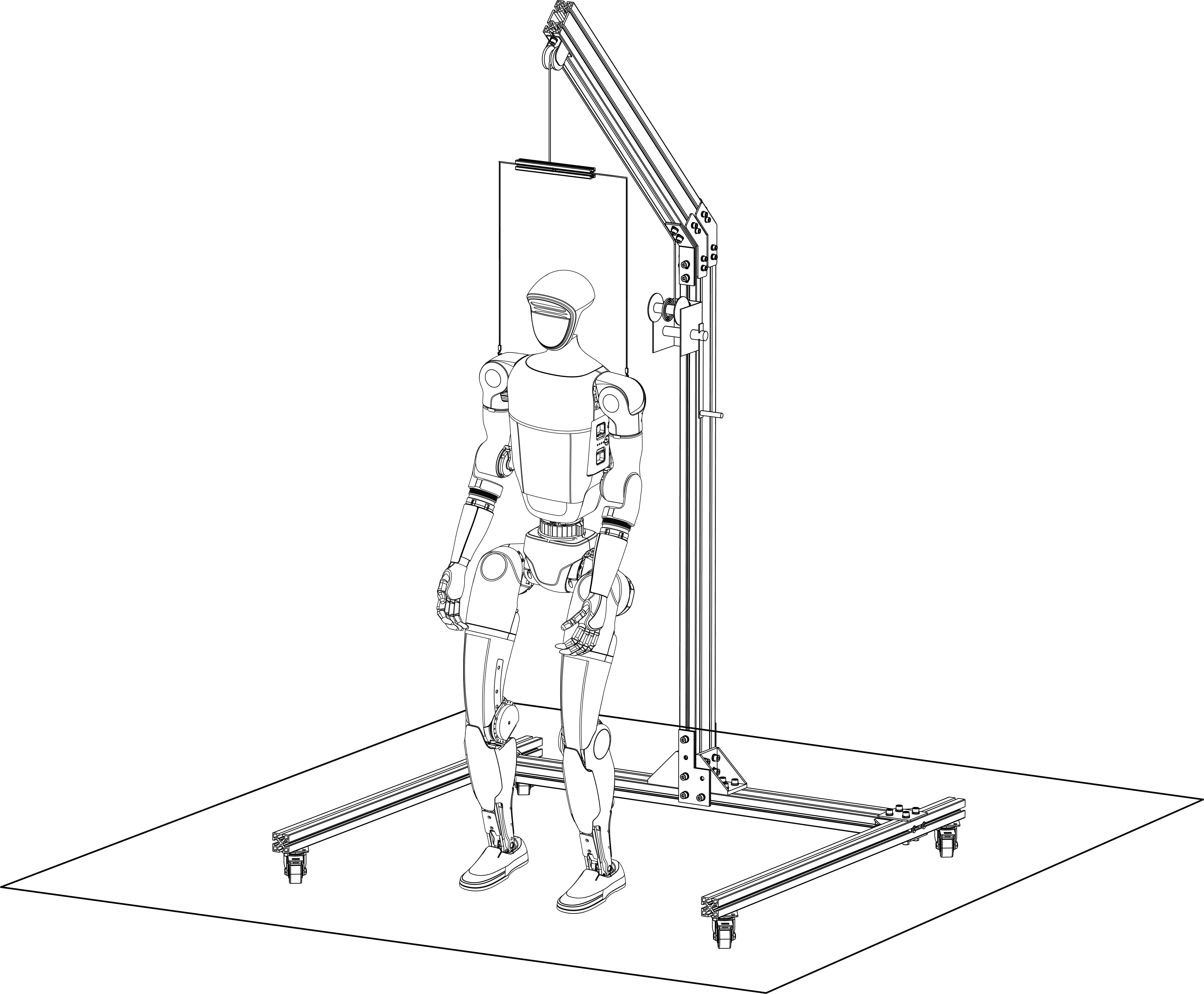
Уникальная особенность робота заключается в свободном старте, он может быть запущен буквально из любового положения: сидя, с пола лицом вверх, стоя. Однако первый запуск робота G1, а тем более оснащенного ловкими руками, производитель рекомендует осуществлять используя рамку с крюком и уравнительные петли. В этом разделе будут описаны эти методы.
Изучите основные обозначения световой индикации головного светодиода.
| Режим | Цвет индикации |
|---|---|
| Стандарнтый режим при запуске Zero Torque | Фиолетовое свечение |
| Режим расслабления моторов Damping | Оранжевое свечение |
| Режим отладки Debug(отключен ai_sport сервис) | Желтое свечение |
| Режим ASR* | Зеленое мигание |
| Режим посадки Seat | Зеленое свечение |
| Режим поддержания баланса Run, Walk | Голубое свечение |
| Режим подготовки позы Standby | Синее свечение |
| Критическая ошибка, потеря связи с моторами | Красное мигание |
| Критическая ошибка, моторы вне диапозона значений | Красная пульсация |
| Ошибка MOSFET,BMS: Аномальное напряжение батареии | Красное свечение |
Обновление
Начиная с обновления 1.5.1 робот глобальной версии оповещает о переходах между режимами на английском языке.
Пуск стоя с поддерживающей рамкой с крюком
- Наденьте уравнительный петли на робота, зацепив концы с карабинами за рым-болты на плечах гуманойда;

- Посадите под крюком и подвестьте за петлю;
- Поднимите робота так, чтобы его торс и таз имели примерно один угол, а сам робот не касался ногами земли;
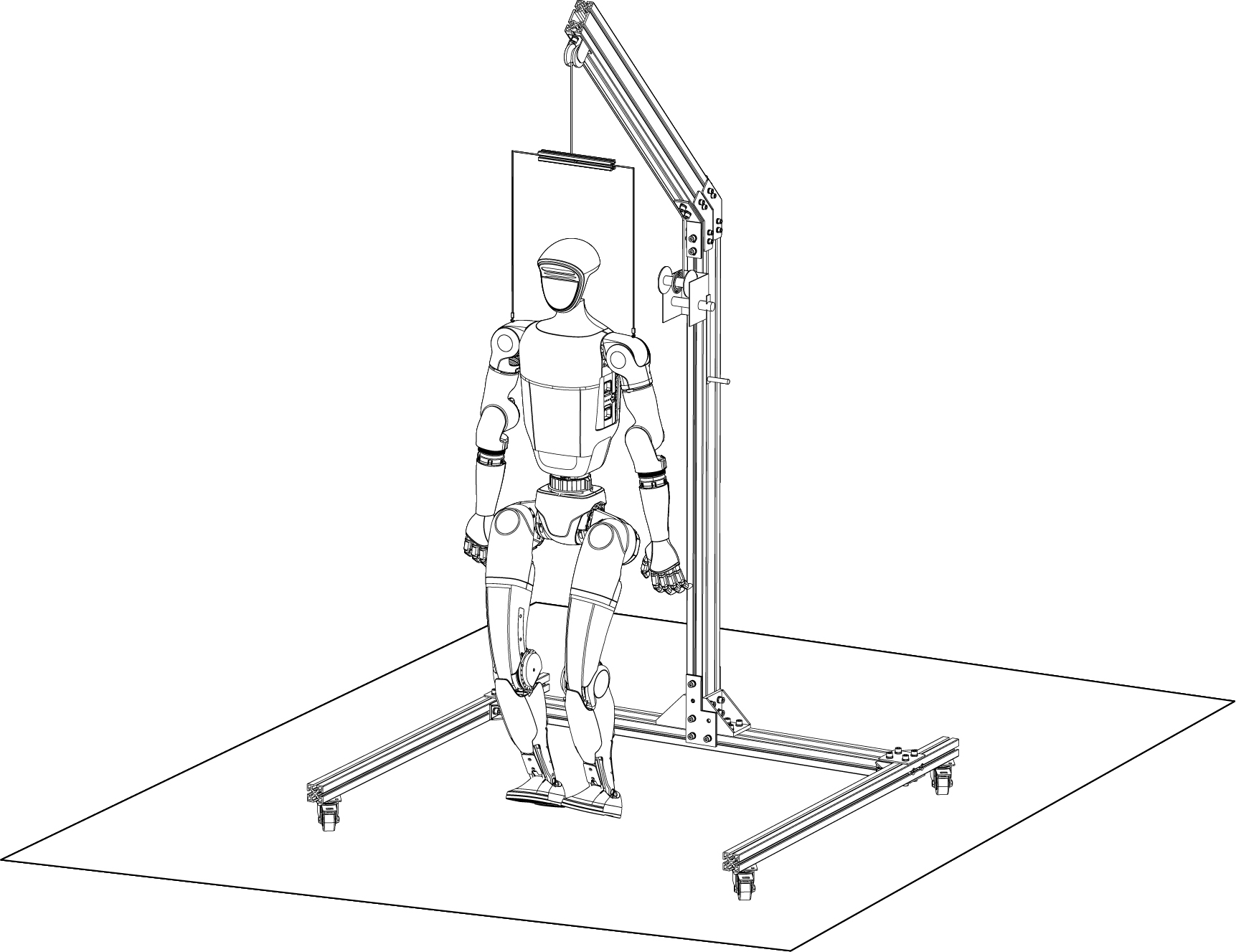
- Запустите робота G1 и дождитесь когда светодиодная подсветка перестанет мигать и будет статично синей;
- Используя большой пульт последовательно вызовите команды расслабить моторы L1 + A и положение стоя L1 + ВВЕРХ. Робот должен выпрямить конечности и выставить стопы параллельно полу;
- Опустите крюк с роботом, чтобы он косался ногами пола и включите походку R1 + X или R1 + Y, робот должен утвердиться и принять устойчивое положение. Робот готов.
 Робот готов.
Робот готов. 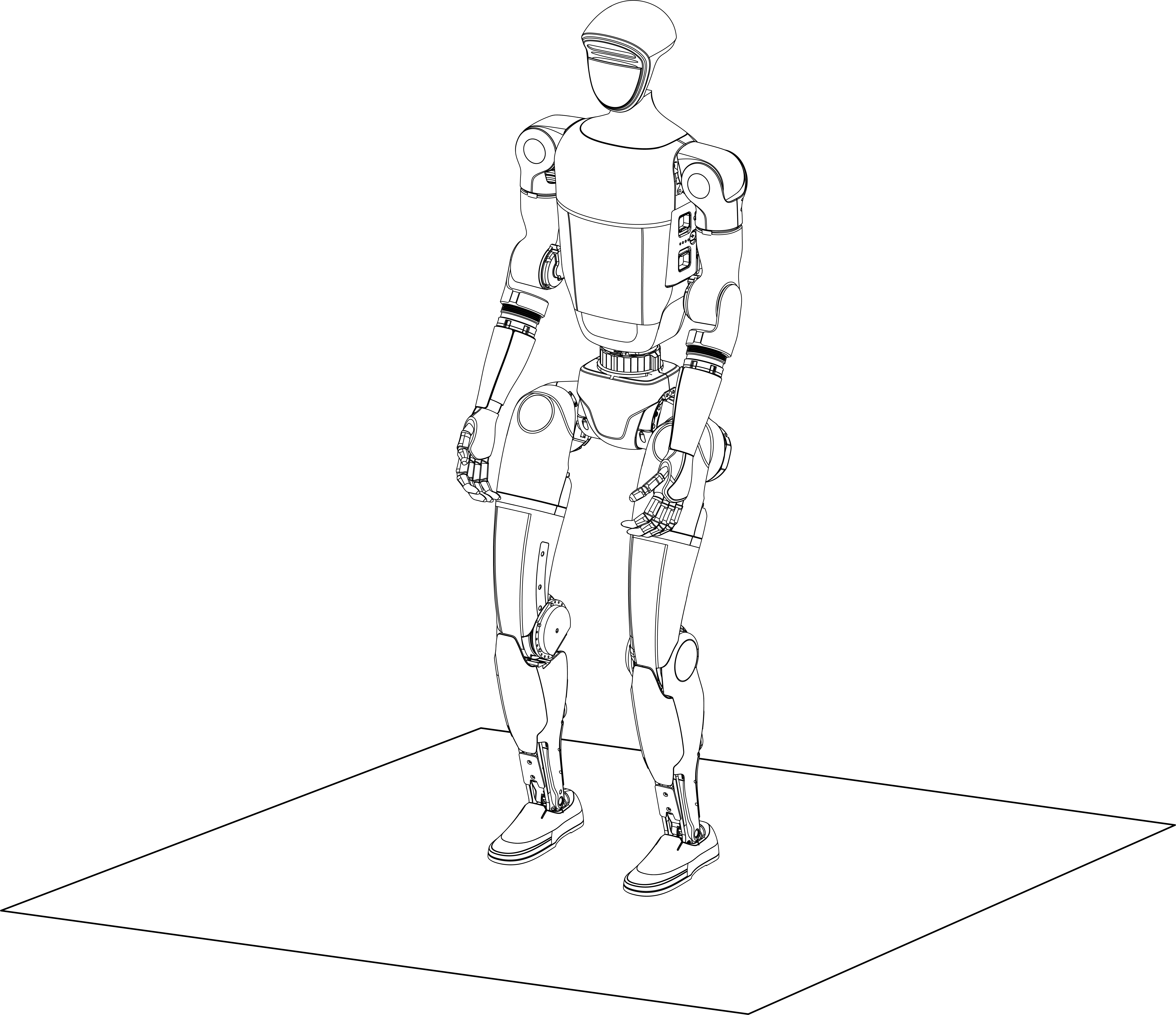
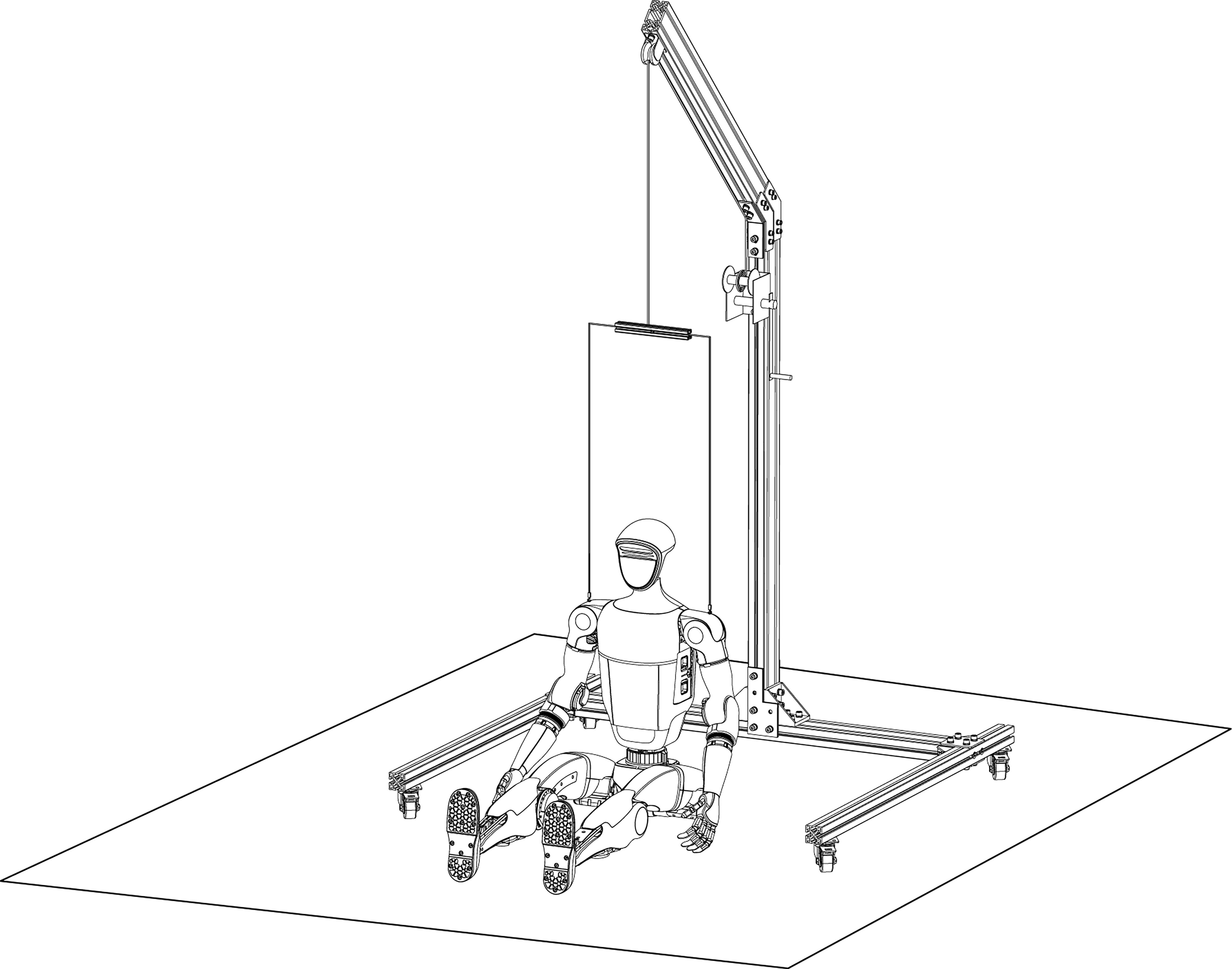
Пуск лежа
- Разложите робота на полу камерой вверх, чтобы его таз и торс максимально соприкасались с покрытием;
- Запустите робота G1 и дождитесь когда светодиодная подсветка перестанет мигать и будет статично синей, двигать моторы под напряжением нежелательно, ввиду появления обратного напряжения на драйвера;
- Используя большой пульт последовательно вызовите команды расслабить моторы L1 + A и свободный подъём L1 + X. Робот должен выпрямить конечности и поджав колени руками подтокнуть торс до положения сидя, после чего выпрямиться и встать из этого положения.
- После характерного “дерганья” робот сам перейдет в режим походки и будет готов к использованию.
Базовое управление и привязка
Мобильное приложение
Мобильное приложение Unitree Explore необходимо для настройки и контроля сервисов, калибровки и диагностики гуманойдных роботов H1 и G1. Для всех роботов первоначально требуется обязательная регистрастрация в облаке Unitree для нормальной работы: она производится через это приложение Отсканируйте соответствующие QR-коды ниже или перейдите по прямым ссылкам под ними
 |  |
| Android | iOS(Testflight) |
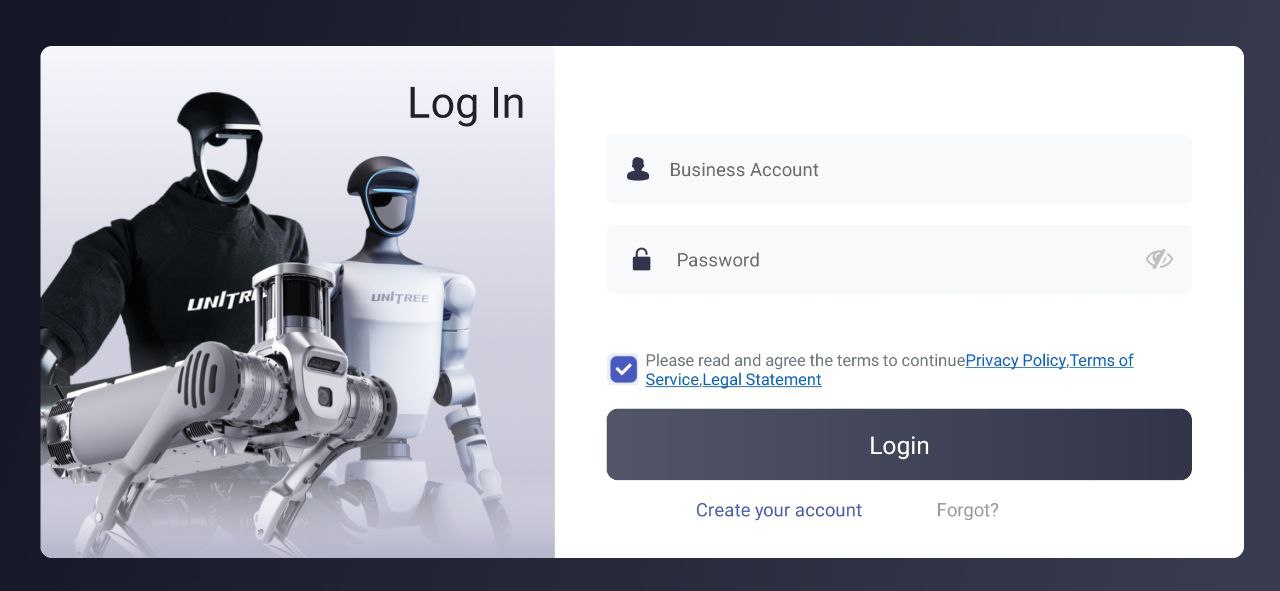
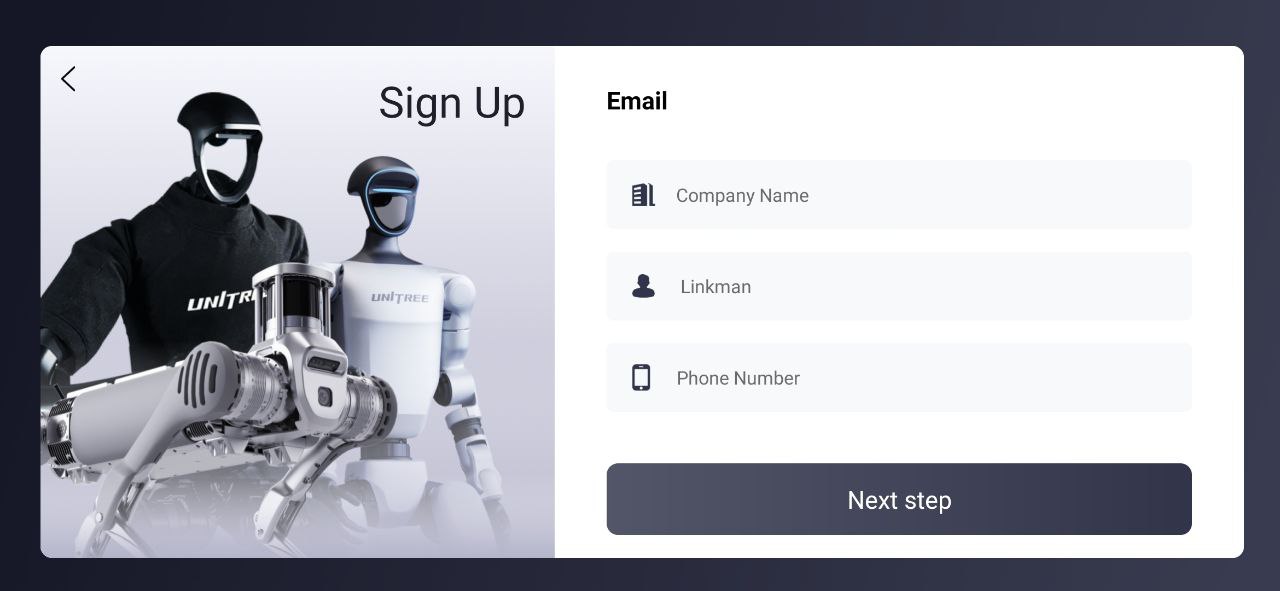
После этого зайдите в приложение создайте свой аккаунт для привязки робота. Поставьте галочку напротив текста: please review and agree the Privacy Policy, the Terms of Service and the Legal Statement, и нажмите Sign up.
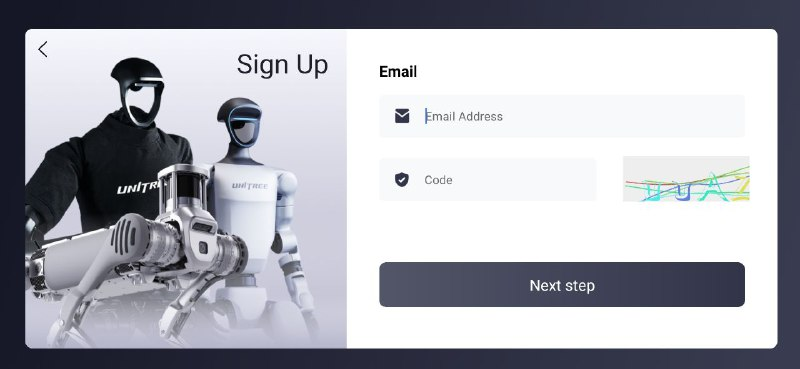
Введите ваш email и код с картинки.
Рекомендуем не использовать доменные и корпоративные почтовые адреса и при создании аккаунта отдать предпочтение почтовым ящикам @gmail.com.
Укажите контактные данные компании.
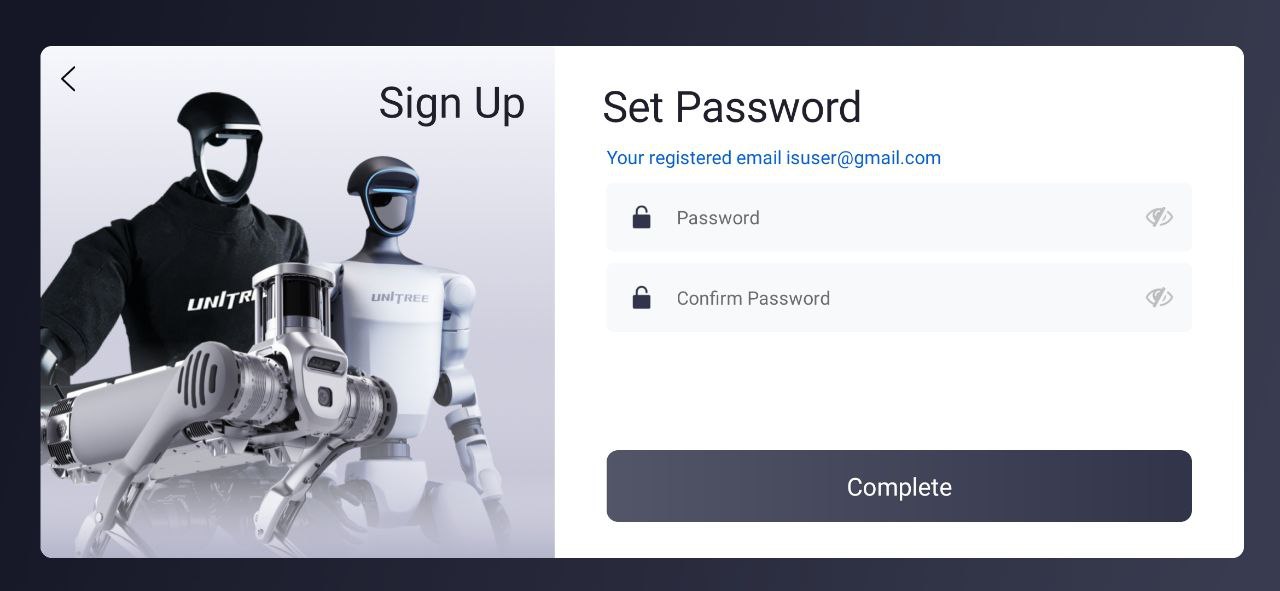
Установите пароль для аккаунта на латинице
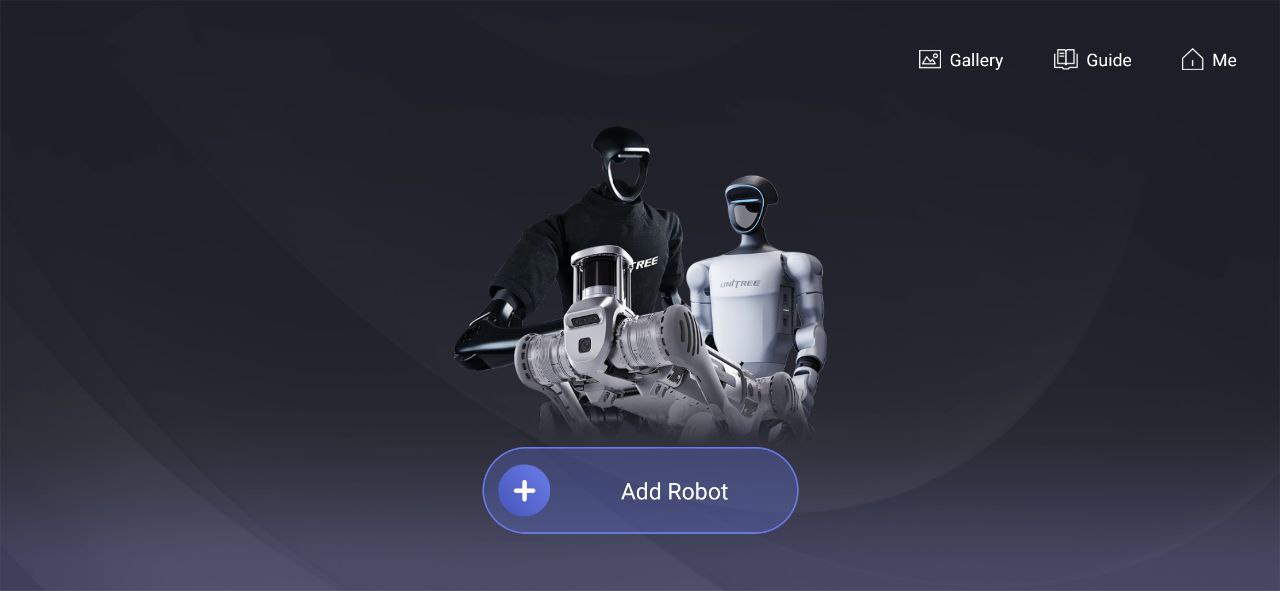
Войдите в Ваш аккаунт и нажмите Add robot. Выберите вашего G1.
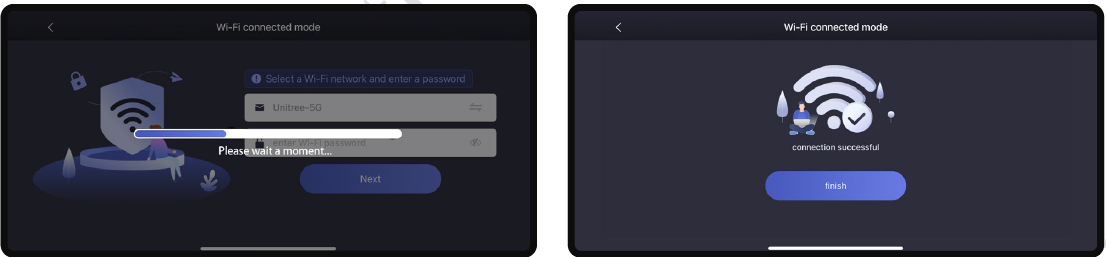
И режим подключения к роботу. Режим Wi-Fi предпочтителен.
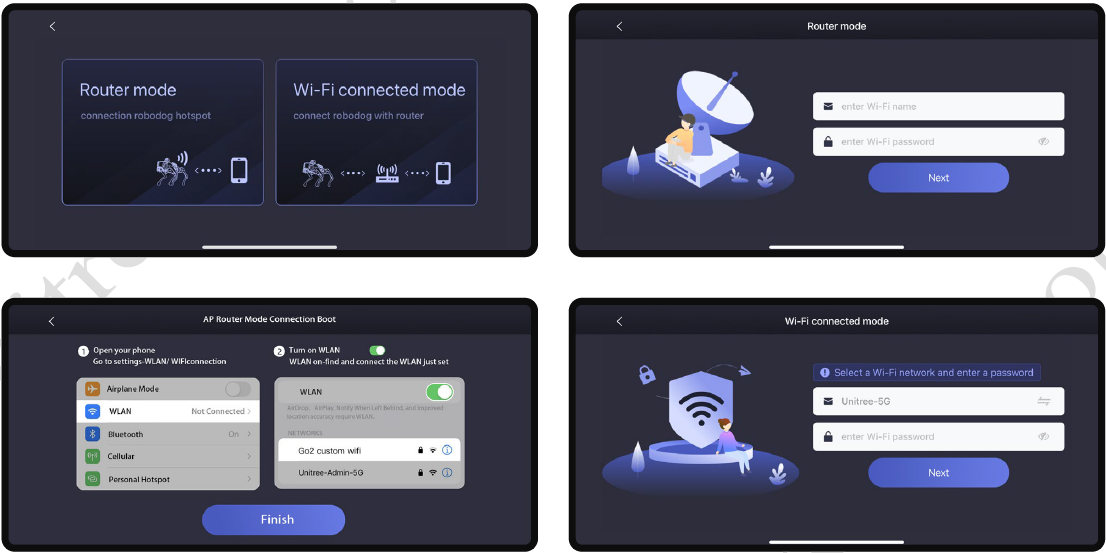
Приложение используя Bluetooth передаст роботу указанные данные, и робот будет передавать свой уникальный идентификатор в облако Unitree, чтобы привязаться к аккаунту. Если все прошло хорошо, то робот будет привязан к аккаунту.
Приложение обязательно должно иметь разрешения для доступа к Местоположению устройства и Использованию сетевых устройств.
Нажмите reconnect, если соединение отсутствует.
Привязка пульта
- В приложении перейдите в раздел [Device]-[Data]-[Remote Control]
- Найдите на пульте стикер с кодом
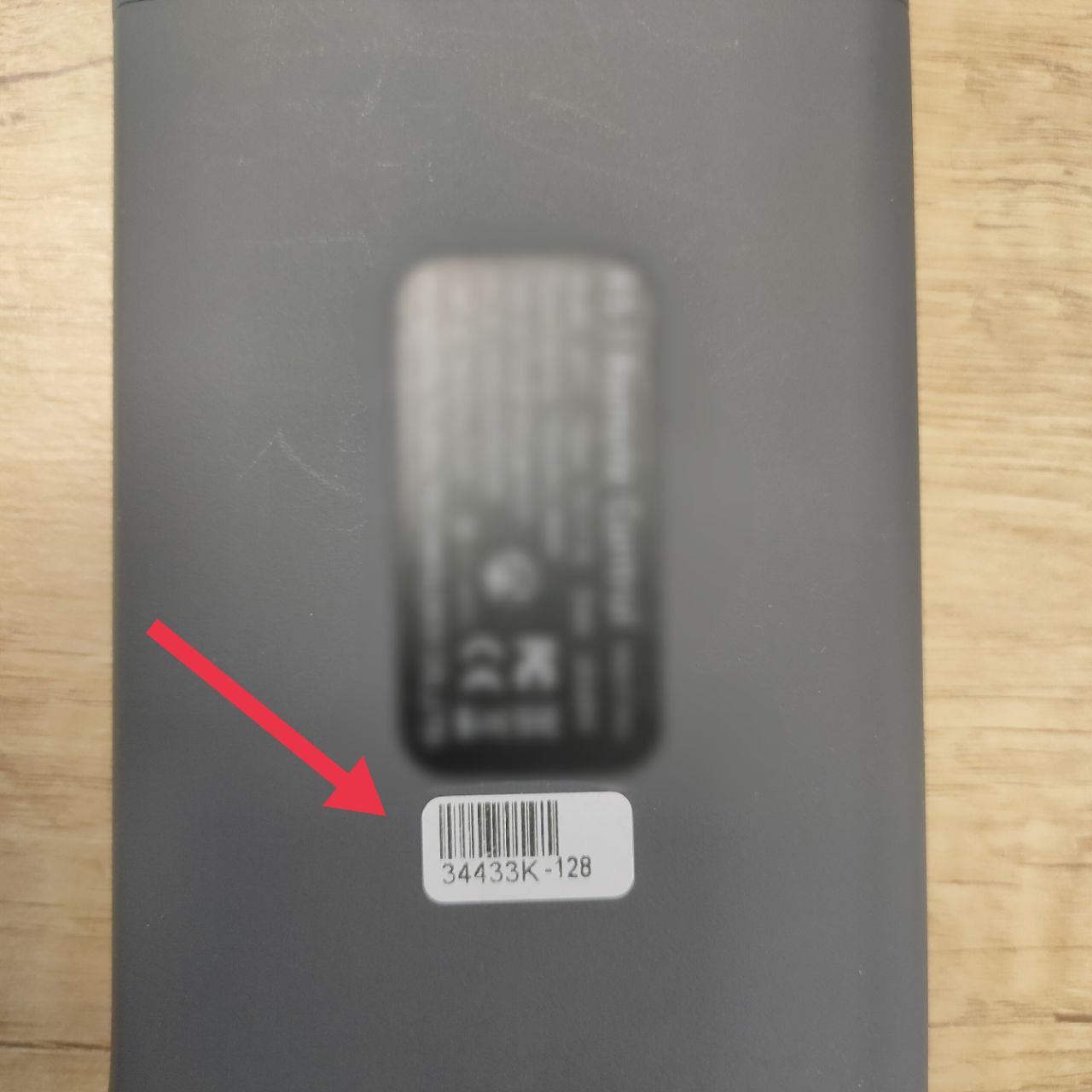
- Введите в поле binding код со стикера до тире (например: 34433К)

- Проверьте успешность привязки выполнив любую команду, перезапуск пульта не требуется.
Разметка клавиш
Данная разметка актуальна на версию прошивки робота 1.5.0
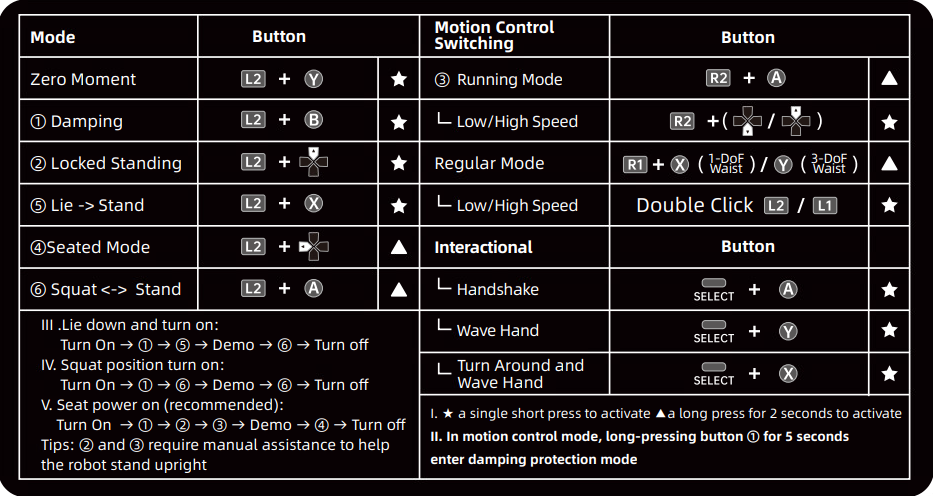
Обратите внимание на фигурные знаки ▲ и ★, показывающие то, каким методом должна выполняться команда ★ - обычное нажатие комбинации ▲ - удержание кнопки или комбинации в течении 1-2 секунд
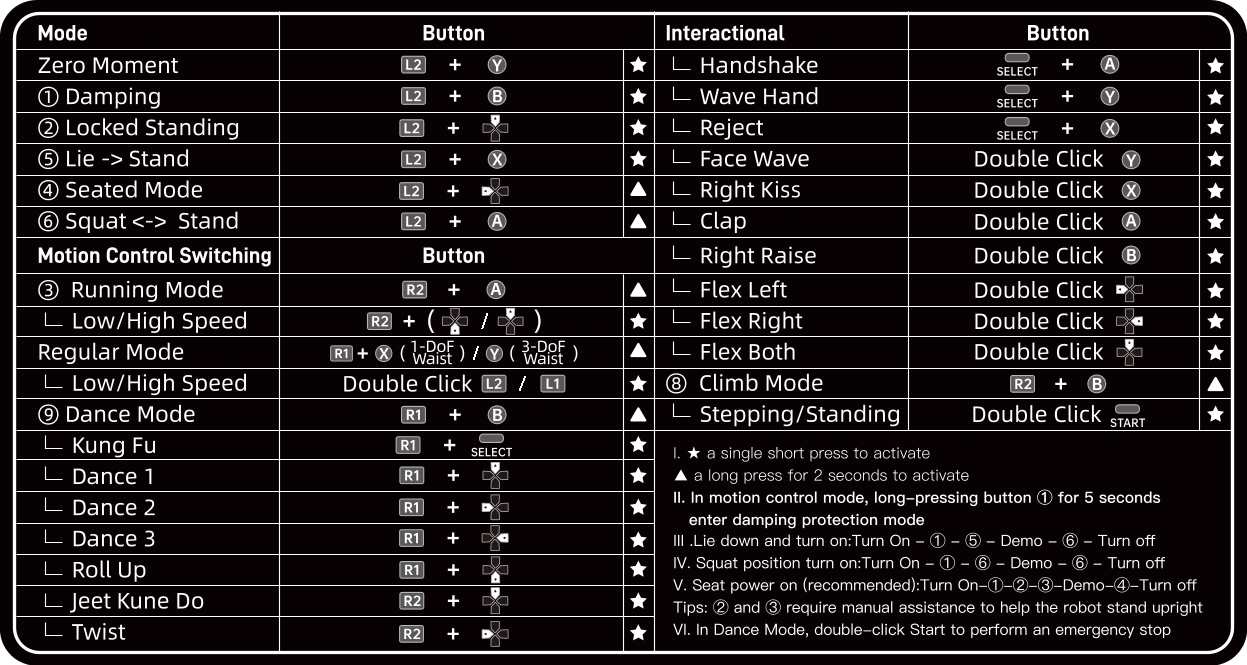
Обновлеенная разметка на версию SP 1.5.1
Специальный отладочный режим
Отладочный режим вызывается скрытой комбинацией и необходим для проверки правильной работы основных режимов и калибровки моторов.
- На подвесе запустите робота и напрягите моторы L1+A на прошивке до версии 1.3.0.15 включительно, L2+B на прошивке после 1.3.3;
- Выведите моторы в положение подготовки L1+ВВЕРХ;
- Снова расслабьте моторы и напрягите заново используя L1+A на прошивке до версии 1.3.0.15 включительно, L2+B на прошивке после 1.3.3;
- Вызовите команду L2+R2 и после используйте L2+A для отладки.
Выход из режима выполняется полной перезагрузкой робота или активацией базового сервиса ai_sport внутри [Device]-[Services Status]
Нагрузочные характеристики
У робота G1 4 группы электроприводов разной мощности. Изучите и опирайтесь на значения максимального момента для предотвращения перегрева при работе приводов в перегрузке и скорого выхода из строя:
-
Приводы коленного сустава(Leg_knee): ID 3,9 — 120 Н*м
-
Приводы тазобедренного сустава(Leg_hip_roll, Leg_hip_pitch, Leg_hip_yaw): ID 0,1,2,6,7,8 — 75 Н*м
-
Моторы лодыжки(Leg_ankle_roll): ID 5,11,4,10 — 25 Н*м
-
Приводы плечевой группы и предплечья (Shoulder_pitch,Shoulder_roll, Shoulder_yaw): ID 15,16,17,22,23,24 — 25 Н*м
-
Приводы запястья (Wrist_yaw): ID 21,28 — ~5 Н*м
Моторы 4,10 используемые в типе управления AB при обеспечении тангажа ступни.
Основные проблемы и ошибки
Во время эсплуатации робота, независимо от модификации могут возникать проблемы, решение которых будет описано в этом разделе инструкции.
Проблема сопряжений и подключения.
- Робот не проходит сопряжение по Bluetooth.
Перезапустите робота и приложение, перезапустите приложение. Если данное действие не принесло эффекта выполните полную перезагрузку смартфона для перезапуска сокета Bluetooth. В случае полной невозможности подключения попробуйте другое устройство.
- Проходит сопряжение по Bluetooth, но WiFi не может получить конфигурацию
Не используйте VPN, не используйте фиктивную геопозицию устройства, не используйте сети MIMO. Убедитесь, что используете сеть 2.4ГГц. Не используйте офисный, корпоративный, гостевой, WiFi с гибридной аутификацией или контекстно-зависимым доступом.
- Не проходит первый шаг, робот в не отображается в списке доступных к добавлению устройств
Перезапустите робота, в случае если данные шаги не помогли устранить проблему, обратитесь в отдел послепродажной поддержки и обслуживания
Проблема с моторами и калибровками
- Светодиод робота пульсирует красным. В приложении в уведомлениях горит ошибка Motor out-of-limit.
Требуется полная перекалибровка робота по видеоинструкции из вклдаки [Guide] в приложении.
- Светодиод робота горит красным, в приложении у робота остутсвует целиком конечность в Communication status.
Проблема с одним из моторов в цепи конечности. В случае с ногой - повреждение коммуникационного кабеля талии при установке или снятии фиксатора талии. Обратитесь в отдел послепродажной поддержки и обслуживания.
- Светодиод красный, во вкладке Wrong sign мотор талии горит красным
Запуск команд робота с неправильно указанной конфигурацией талии вызвал перегрузку мотора и выход из строя драйвера - требуется замена. Обратитесь в отдел послепродажной поддержки и обслуживания.
- Робот не может самостоятельно встать, робота наклоняет в области талии.
Это следсвтие неправильно указанной конфигурации талии [Waist Motor Locked]. Переведите робота в Zero Torque режим и проверьте правильность установленного значения.