Быстрый старт
Данное руководство дает базовую информацию по эксплуатации робособаки модели A1.
Начало работы
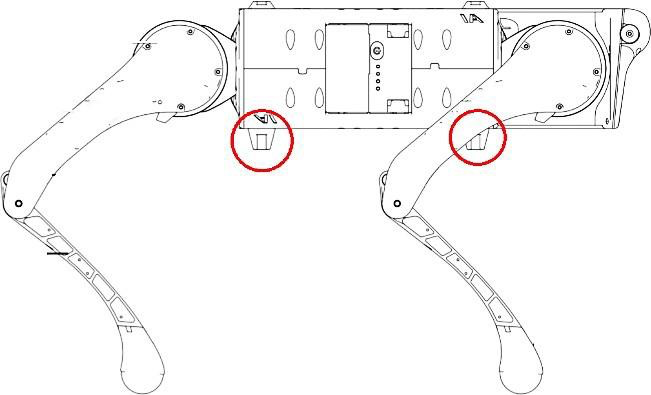
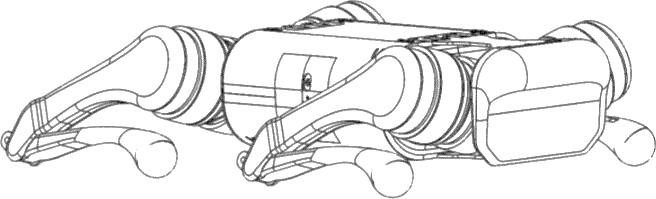
Положите робота в стартовую позицию: корпус лежит на земле горизонтально, без наклона, подставки на животе робота плотно прилегают к земле. Ноги робота собраны как показано на рисунке ниже (четыре локтевых/коленных сустава и резиновые ступни должны касаться земли).
Обязательным пунктом на этапе эксплуатации служит предварительный внешний осмотр робота перед каждым включением на наличие дефектов: повреждение проводки, отсутствие защищающих элементов корпуса, раскрученных винтов и прочих моментов, отличающихся от первоначального вида робота (в случае обнаружения дефектов дальнейшая эксплуатация робота возможна, однако мы не сможем гарантировать дальнейшее обслуживание в рамках гарантийного договора).
В этом случае требуется обратиться к инженерам в службу поддержки в чате, они смогут оперативно ответить на любые интересующие вопросы.
Для включения робота необходимо провести следующие действия:
- Запуск робота: одно короткое нажатие на кнопку питания на аккумуляторе, второе нажатие длинное - порядка 5 секунд. Результатом успешного включения является характерный звук. При включенном аккумуляторе светодиоды постоянно горят зеленым цветом и являются индикатором уровня заряда.
- Включение пульта: одно короткое нажатие и одно длинное (порядка 5 секунд, до характерного звукового сигнала). Пульт автоматически подключается к роботу. При успешном подключении все светодиоды на левом торце пульта должны гореть.
- После подъема робота на выпрямленные лапы необходимо ожидание порядка 1-2 минут для запуска всех систем на роботе.
Категорически запрещаются любые попытки произвести какое-либо действие с роботом до того, как он сам встанет на лапы. Результатом полного успешного запуска робота является его исходное положение: робот должен выпрямить ноги и встать на установленную поверхность.
Если робот не встает до конца после проведенных действий, а ложится обратно, проверьте 2 соблюдение всех вышеперечисленных условий или выполните попытку принудительного подъема робота следующей комбинацией:
Двойное нажатие
L2 + B-> Двойное нажатиеL2 + A
Режимы
Робот может находиться одном из двух глобальных режимов:
- стандартом
- спортивном
Стандартный режим используется при разработке программного управления на низком уровне (управление моторами), а также для калибровки. Вы можете использовать ручное управление с пульта в этом режиме, но робот будет неустойчив.
Спортивный режим представляет собой официальную программу управления движением от производителя. В этом режиме достигается максимальная устойчивость и подвижность. Он используется для ручного управления собакой с пульта, а также при разработке программного управления на высоком уровне (движение вперед, назад и т.д).
Стандартный режим имеет 4 подрежима:
- режим ходьбы
- статичное состояние
- режим управления туловищем
- режим калибровки
Спортивный режим имеет 7 подрежимов:
- режим ходьбы
- статичное состояние
- режим управления туловищем
- режим подъема по лестнице
- режим бега
- режим следования за объектом (запускается из приложения)
- SLAM (только на моделях модификации Explorer)
Управление роботом
После включения робот самостоятельно встает и находится в стандартном режиме. В этом режиме робот может стоять, ходить и вращать телом, но делает это неустойчиво. Режим предназначен для разработчиков своей походки, поэтому при первом знакомстве с роботом требуется перейти в спортивный режим, чтобы использовать официальную программу управления движением.
Однако, стандартный режим гарантированно потребуется и обычному пользователю. Как минимум - для калибровки робота.
Сейчас, пока Вы находитесь в стандартном режиме, попробуйте походить роботом, нажав Start и двигая стиками. Чтобы робот остановился снова нажмите Start. Полный перечень команд управления представлен ниже, но сначала необходимо изучить специфику переключения режимов.
Из-за программной реализации переключение режимов на первый взгляд может показаться запутанным, однако при должной сноровке нажатие комбинаций кнопок руками доводится до автоматизма.
Переход: Стандартный режим → Спортивный режим
Попробуем перейти в спортивный режим.
Переключение в спортивный режим происходит из положения лежа. Полная последовательность действий для перехода в спортивный режим следующая:
- нажать 3 раза
L2 + A- робот ложится на пол - нажать
L1 + Start- непосредственно включение спортивного режима. После чего робот поднимется - нажать кнопку
Start- робот начнет ходьбу на месте.
Теперь можно двигать стиками чтобы робот перемещался.
Индикатором успешного перехода в спортивный режим послужит более ускоренное и уверенное перемещение собаки, а также более частое перебирание лап на месте. Если вы хотите улучшить стабильность и маневренность робота при перемещении, то этот режим наиболее оптимален.
Однако этот метод можно использовать только для первого перехода в спортивный режим после включения робота. Для дальнейших переходов из спортивного режима в стандартный и наоборот последовательность действий меняется.
Переход: Спортивный режим → Стандартный режим
Для перехода обратно в стандартный режим:
- Нажать
L2 + Aнесколько раз, до того момента, пока робот не примет положение лежа L2 + B- робот перестал шуметьL1 + L2 + Start- непосредственно отключение спортивного режима- зажать
L2и нажать 2 раза кнопкуB - зажать
L2и нажать 2 раза кнопкуА
После этого робот поднимется и будет работать в стандартном режиме.
Переход: Спортивный режим → Подъем по лестнице
Режим подъема по лестнице является подрежимом спортивного режима. Поэтому переход в режим подъема по лестнице осуществляется только когда робот находится в спортивном режиме. Последовательность действий следующая:
- Нажать
L2 + Aнесколько раз, до того момента, пока робот не примет положение лежа L2 + B- робот перестал шуметьL1 + L2 + Start- временное отключение спортивного режима для запуска подрежима подъема по лестнице- После нажать
L1 + Startи еще разStartдва раза - Нажать
L2 + Startи еще разStart.
После этого робота при ходьбе будет поднимать лапы выше, что дает возможность взбираться по лестницам.
Переход: Подъем по лестнице → Спортивный режим
Для отключения подрежима подъема по лестнице, нужно выполнить переход обратно в спортивный режим. Последовательность действий следующая:
- Нажать
L2 + Aнесколько раз, до того момента, пока робот не примет положение лежа L2 + B- робот перестал шуметьL1 + L2 + Start- отключение подрежима подъема по лестнице и переход в классический спортивный режим- Нажать
L1 + Startи еще разStartдва раза
Правила эксплуатации
Перед выполнением команд:
- Переведите робота в спортивный режим: нажмите 3 раза
L2 + A, чтобы робот опустился на пол, далее нажмитеL1 + Start.- Не используйте максимальную скорость и сложные скрипты/трюки (сальто, лунная походка) на упругих, мягких и скользких покрытиях. Старайтесь управлять как можно плавнее. Перед восстановлением после падения проверьте, не мешают ли ноги пса друг другу. Если мешают — выключите приводы.
- Перед выполнением комбинации «Сальто» заряд аккумулятора должен быть не ниже 3 индикаторов.
- Настоятельно рекомендуется воздержаться от частого использования таких команд, как «Сальто», «Лунная походка» и «Танец». Это может привести к ускоренному износу резиновых лапок робота, а также снизить срок эксплуатации используемой батареи.
- Перед использованием команды «Сальто» убедитесь, что робот приземлится на мягкую поверхность (например: гимнастический мат).
- Рекомендуется проводить калибровку робота вначале каждого дня, когда робот должен быть использован.
- До и после выполнения каждой команды трюка необходимо нажать 2 раза кнопку
Startна пульте.- При выполнении команд рекомендуется удерживать клавиши в течение 1-2 секунд вместо обычного нажатия.
- Рекомендуется проверять температуру моторов и приводов робота каждый час активной эксплуатации. В случае сильного нагрева рекомендуется отключить робота до достижения оптимальной температуры моторов.
- Во время использования таких команд, как «Лунная походка» и «Танец» возможно осуществлять легкое движение вперед-назад, но только слегка отклоняя стики, во избежание падения.
Полный перечень команд
| Кнопка | Результат | |
|---|---|---|
| Левый джойстик | Вверх и вниз | Двигаться вперед-назад / лежать |
| Влево и вправо | Поворот влево и вправо | |
| Правый джойстик | Вверх и вниз | Поворот головы вверх, вниз / шаг |
| Влево и вправо | Боковое движение/качание головой | |
| Start | Разблокировка суставов | |
| Движение (режим 2) | ||
| Продолжение движения (двойное нажатие, режим 3) | ||
| L1+Start | Переход в спорт режим | |
| L2+Start | Режим бега | |
| L1+A | Положение стоя на обеих ногах (Зайка) | |
| L1+X | Танец 1 | |
| L1+B | Лунная походка | |
| L2+X | Вставание после падения | |
| L2+Y | Переворот | |
| L1+Y | Сальто | |
| L2+B | Положить робота на землю | |
| L2+A | Фиксирование суставов и переключение в положение лежа | |
| L2+A (повторно) | Вернуться в положение стоя | |
Мобильное приложение
- Скачать приложение (iOS/Android) с официального сайта:
- Подключиться к Wi-Fi сети робота:
Имя сети: UnitreeRoboticsA1-XXXXXX (XXXXXX — его серийный номер) Пароль: 00000000 - Открыть приложение и зайти в настройки:

- Активировать переключатель Enable Customization и ввести данные как на скриншоте:
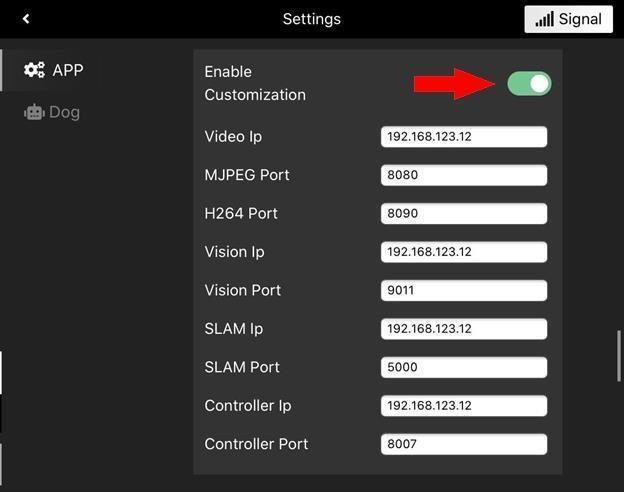
IP-адрес 192.168.123.12, применяется для всех полей связанных с IP
- Перейти в режим просмотра:

Вы подключились к роботу и теперь можете видеть изображение с его камеры во вкладке Vision.
Перехват RTSP-потока
Подключитесь к Wi-Fi робота и введите в браузерной строке:
https://192.168.123.12:8080
или
http://192.168.123.12:8080/?action=stream