Быстрый старт
Данное руководство содержит необходимую информацию, позволяющую ознакомиться с работой манипулятора в ручном режиме и начать разработку своего ПО.
Введение
Манипулятор является самостоятельным устройством и может как использоваться отдельно, так и быть установлен на любую платформу, например на робособаку модели B1. В случае поставки манипулятора в комплекте с робособакой, производителем уже выполнена программная интеграция между ними, что позволяет начать использовать манипулятор сразу, управлять им с пульта для управления роботом. Для разработки своего программного обеспечения для манипулятора производитель предоставляет SDK.
Конструкция манипулятора
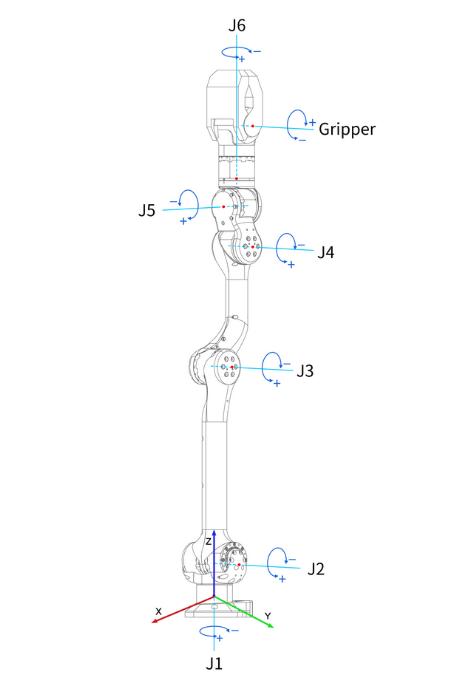
Углы поворота звеньев:
| Звено | Минимум | Максимум |
|---|---|---|
| J1 | -150° | 150° |
| J2 | 0° | 180° |
| J3 | -165° | 0° |
| J4 | -80° | 80° |
| J5 | -85° | 85° |
| J6 | -160° | 160° |
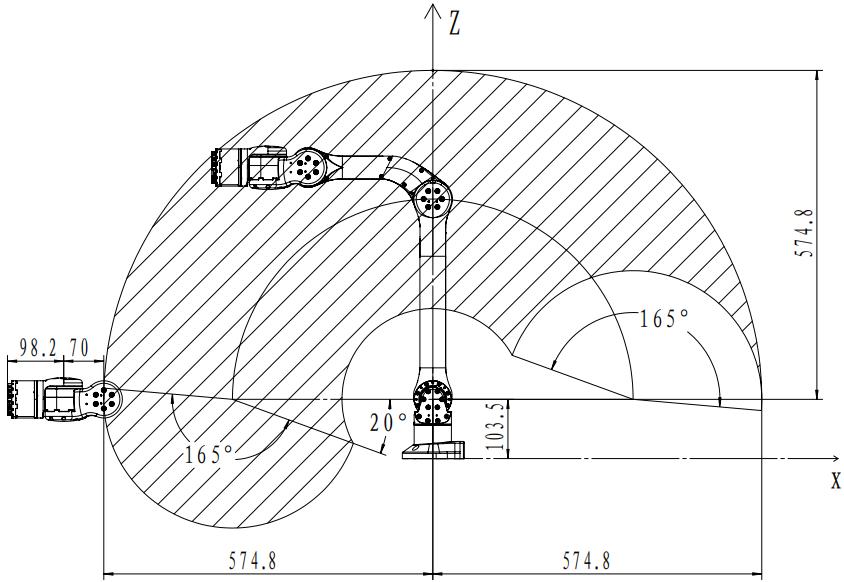
При использовании манипулятора необходимо соблюдать осторожность с целью предотвращения травм, а так же поломки манипулятора.
Размеры рабочей зоны указаны ниже:
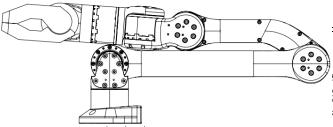
При включении робособаки или подаче питания на манипулятор от другого источника, манипулятор автоматически стартует. Включение должно происходить из позиции, указанной ниже.
Интерфейсы и питание
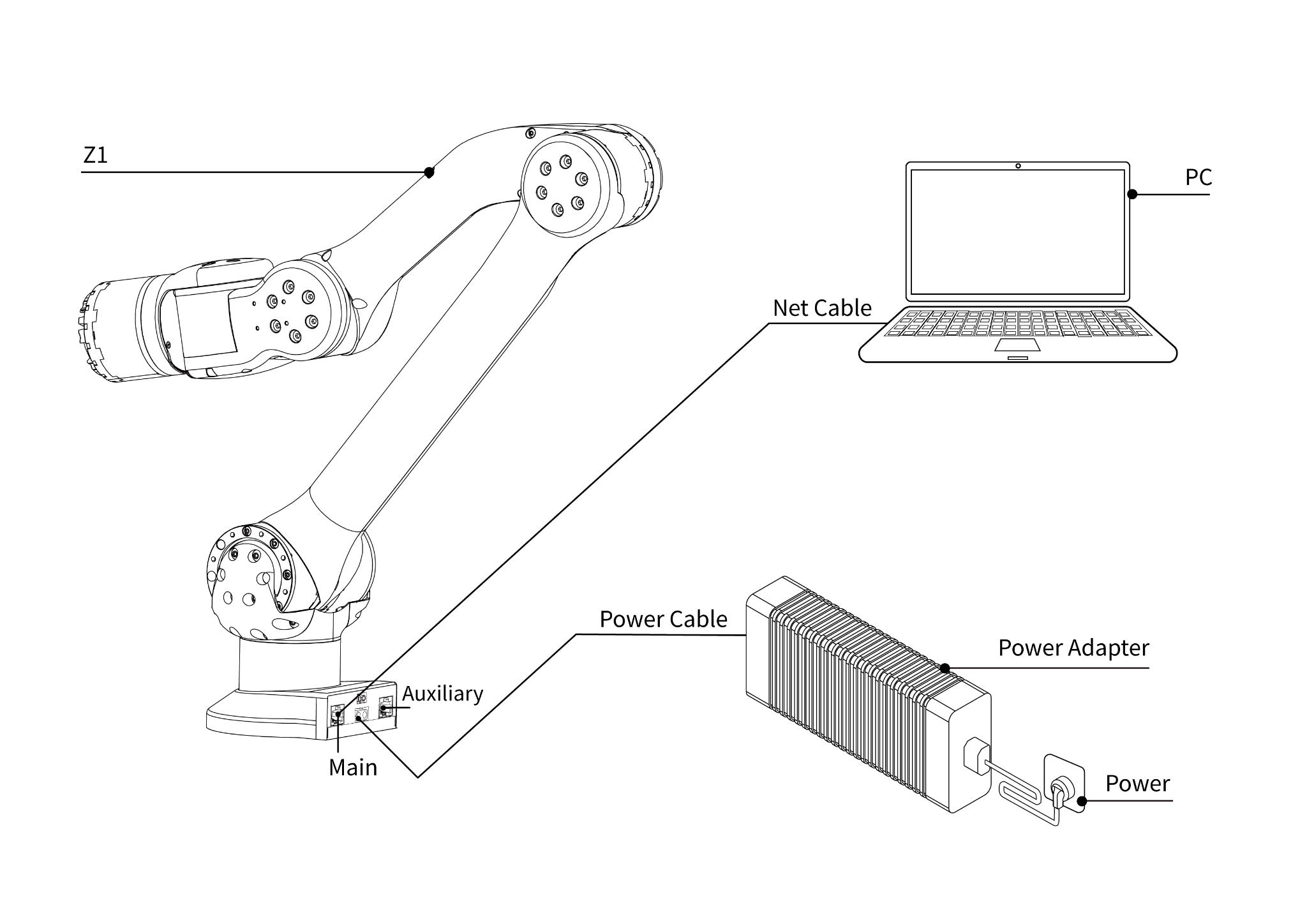
Коммуникационная панель манипулятора имеет 4 разъема:
- Разъем XT60 - питание манипулятора, 24 вольта.
- Разъем XT30 - питание манипулятора (другой тип разъема), 24 вольта
- Разъем RJ45 (слева от разъемов питания) - Ethernet.
- Разъем RJ45 (справа от разъемов питания) - вспомогательный Ethernet для конфигурирования манипулятора
Управление
Информация актуальна на версии v1.38.0 спортпрограммы робособаки. На более поздних версиях комбинации и реакции могут измениться. В таком случае документ будет обновлен.
Так как Unitree произвели интеграцию манипулятора с робособакой B1, то можно сразу начать использовать манипулятор без программирования, управляя положением звеньев и захватом в ручном режиме (с пульта робособаки). Реализовано 3 режима управления манипулятором:
- Управление звеньями
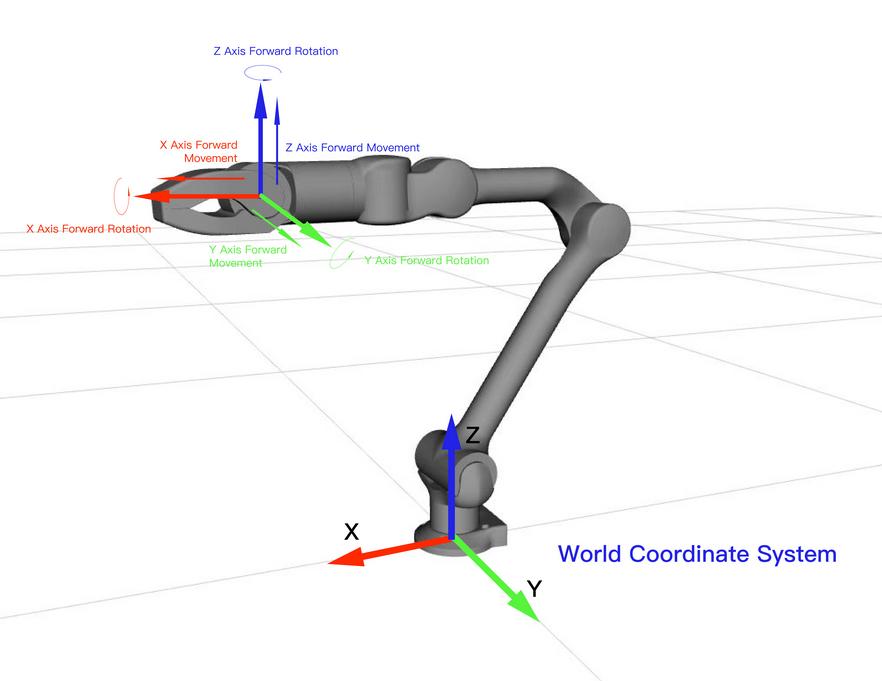
- Управление в декартовом пространстве (перемещение манипулятора по осям XYZ, вращение вокруг них)
- Демонстрационный режим: положение и траектория движения
Рассмотрим подробно каждый режим.
Режим управления звеньями
Для перехода в режим нажмите одновременно L1 + L2, затем R2
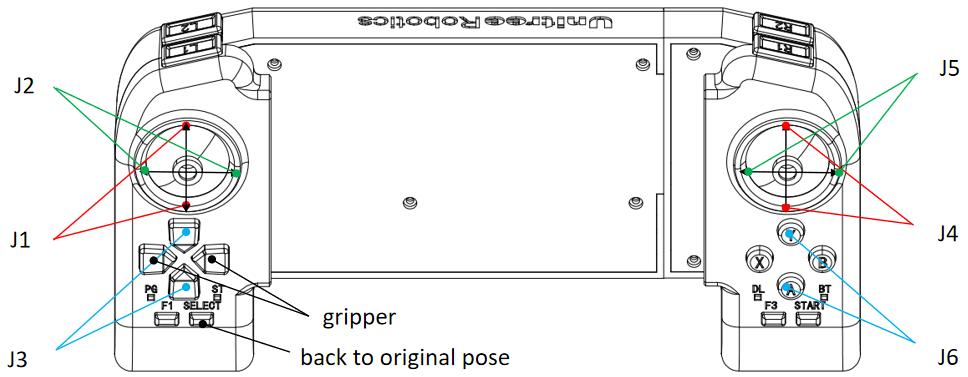
| Левый стик (вертикаль) | управление звеном J1 |
| Левый стик (горизонталь) | управление звеном J2 |
| Стрелки вверх/вниз | управление звеном J3 |
| Правый стик (вертикаль) | управление звеном J4 |
| Правый стик (горизонталь) | управление звеном J5 |
| Кнопки Y/A | управление звеном J6 |
| Стрелки влево/вправо | управление захватом |
Повторное нажатие кнопки R2 вернет манипулятор в исходное состояние.
Режим управления в декартовом пространстве
Для перехода в режим нажмите одновременно L1 + L2, затем R1: 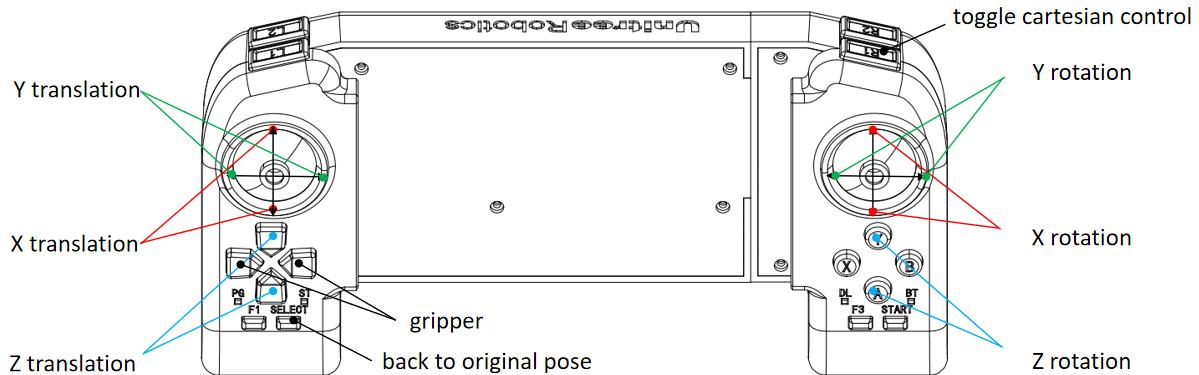
| Левый стик (вертикаль) | перемещение захвата по оси X |
| Левый стик (горизонталь) | перемещение захвата по оси Y |
| Стрелки вверх/вниз | перемещение захвата по оси Z |
| Правый стик (вертикаль) | вращение захвата вокруг оси X |
| Правый стик (горизонталь) | вращение захвата вокруг оси Y |
| Кнопки Y/A | вращение захвата вокруг оси Z |
| Стрелки влево/вправо | управление захватом |
Нажатие кнопки R2 вернет манипулятор в исходное состояние (и переключит в режим управления звеньями).
Для возврата в режим управления роботом необходимо снова нажать L1 + L2 (см. примечание ниже).
Демонстрационный режим: положение и траектория движения
Производитель реализовал демонстрационные статичное положение манипулятора и скрипт движения, которые можно запустить с пульта.
Для запуска скрипта необходимо, находясь в режиме управления звеньями нажать кнопку Select. Робот переведет манипулятор в демонстрационное состояние. Повторное нажатие Select, будет возвращать манипулятор в начальное состояние, а также включать движение по демонстрационной траектории (захват циклично будет перемещаться в разные стороны).
Нажатие комбинации клавиш
L1 + L2используется для перехода между режимами управления роботом и управлением манипулятором. Но на на текущей версии спортпрограммы робособаки (v1.38.0) наблюдается баг: иногда при возврате в режим управления роботом сохраняется возможность управлять манипулятором. А именно при взаимодействии с органами управления пульта двигается и робособака и манипулятор. До тех пора пока не выпущено обновление, для предотвращения этой ситуация предлагается правильно выходить из режима управления манипулятором. Находясь в режиме управления звеньями нажмитеR2(манипулятор перейдет в начальную позицию этого режима), далее нажмитеSelect(манипулятор перейдет в демонстрационное статичное состояние), далее снова нажмитеSelect(манипулятор снова перейдет в начальную позицию). Только после этого нажмитеL1+L2(иногда дважды) для переключения в режим управления роботом.Этот метод поможет в случае если достаточно передвижения робособаки со сложенным манипулятором. Если необходимо передвижение с определенным положением манипулятора, то последний предварительно нужно зафиксировать комбинацией
L1 + R1.