Быстрый старт SDK
Установка SDK
unitree_sdk2 – пакет средств разработки созданный Unitree Technology. Представляет экранированные интерфейсы для базового управления приводами и высокоуровневого управления движениями, и обеспечивает соответствующие функции внешним интерфейсам роботов.
Системная среда
Рекомендуем проводить разработку из-под операционной системы Linux Ubuntu 20.04. так как разработка из-под MacOS и Windows не поддерживается. ПК1 запускает официальные службы и не предоставляет доступ к разработке; ПК2 дает доступ к разработке.
Сетевая среда
Подключение к пользователю на компьютерах внутри H1 производится через соответствующую сеть. Подразумевается, что новые пользователи используют проводное подключение для подключения к внутренним ПК, для установки сетевого связи с роботов через маску 192.168.123.X. Опытные пользователи могут настроить свое собственное сетевое окружение. Установка unitree_sdk2
cd /home/unitree/workspace/unitree_sdk2/
mkdir build
cd build
cmake ..
sudo make install'
# Компиляция
'cd /home/unitree/workspace/unitree_sdk2
mkdir build
cd build
cmake ..
make
При успешном выполнении данных шагов в директории build будет создано приложение
Настройка сетей
Шаги по настройке сетей
-
Подсоединить сетевым кабелем робота(с правой стороны туловища) к сетевому порту компьютера. Закрепленный IP-адрес бортового компьютера 192.168.123.123, необходимо установить подключенный компьютер к роботу в тот же сегмент сети, в которой находится робот. Для проверки соединения с роботом использовать ping 192.168.123.161 в терминале.
-
Проверьте имя сетевой карты отвечающей за 123 сегмент сети используя
ifconfig
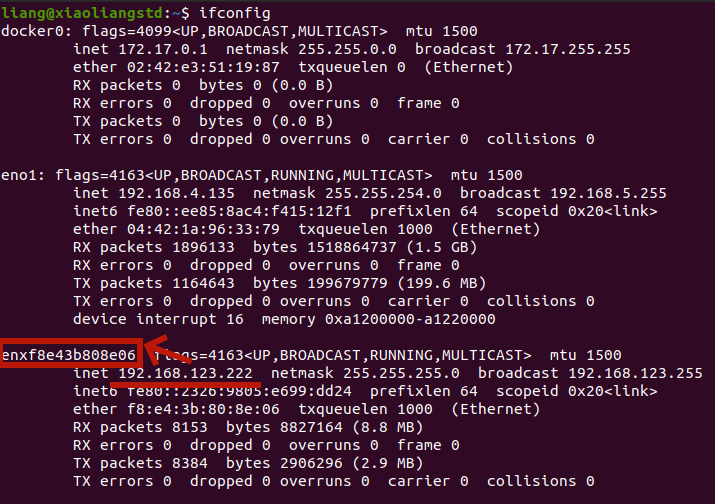
Как показано на изображении, имя компьютера с адресом 192.168.123.222 это ==enxf8e43b808e06==. Это надо запомнить.
- Для запуска программ, необходимо ввести следующие команды в терминал находясь в режиме отладки для робота (L2+R2 на пульте):
cd /home/unitree/workspace/unitree_sdk2/build
cp ../example/humanoid/config/* ./
./h1_low_level_example имя сетевой карты компьютера
Запуск программ вызывает движения нескольких сочленений робота, предоставьте свободное от объектов и людей место вокруг робота для безопасной эксплуатации.
Пользователь может запускать такие программы удаленно, если они размещены в памяти бортового компьютера ПК2. Для проверки доступности ПК2/ПК3 используйте следующие команды в терминале находясь в сети робота:
ping 192.168.123.162
ping 192.168.123.163
- Подключитесь через ssh с выбранным бортовым компьютером через имя пользователя и пароль (получаются у производителя ). Во избежание ошибок рекомендуется скомпилировать исходники SDK на бортовом компьютере.
- Запуск программ через ssh и подключение ПК пользователя к роботу может пропадать (запуск производить только войдя изначально в режим разработки низкого уровня).
nohup ./executable > log.txt &