Этот мануал черновой и еще не одобрен администратором
Обзор SDK
H1
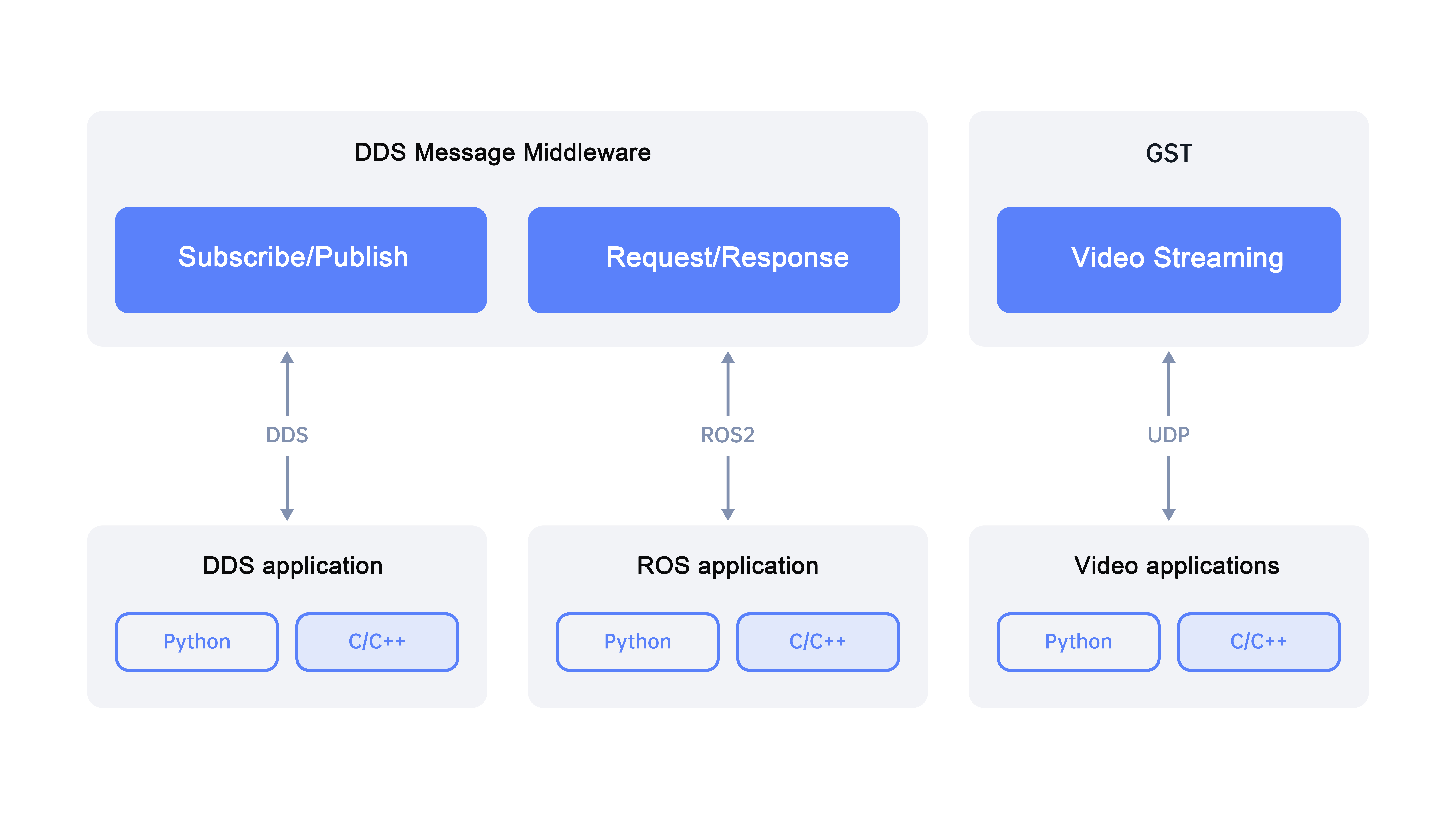
Робот H1 в качестве промежуточного межпрограммного сообщения и основного взаимодействия данных использует два мода: subscpition/publish и request/response.
**subscpition/publish:** получатель подписывается на сообщение, которое отправитель рассылает получателям в соответствии с подписочным списком. Такой метод в основном используется для средне и высокочастотного и продолжительного взаимодействия с данными.
**request/response**: вопросно-ответная форма сообщения, при которой сбор и взаимодействие с данными осуществляется посредством запросов. Этот метод используется для переключения функций или при низкой частоте необходимости взаимодействия с данными. Вызов метода осуществляется по средством запросов API и вызовов функций.
Архитектура
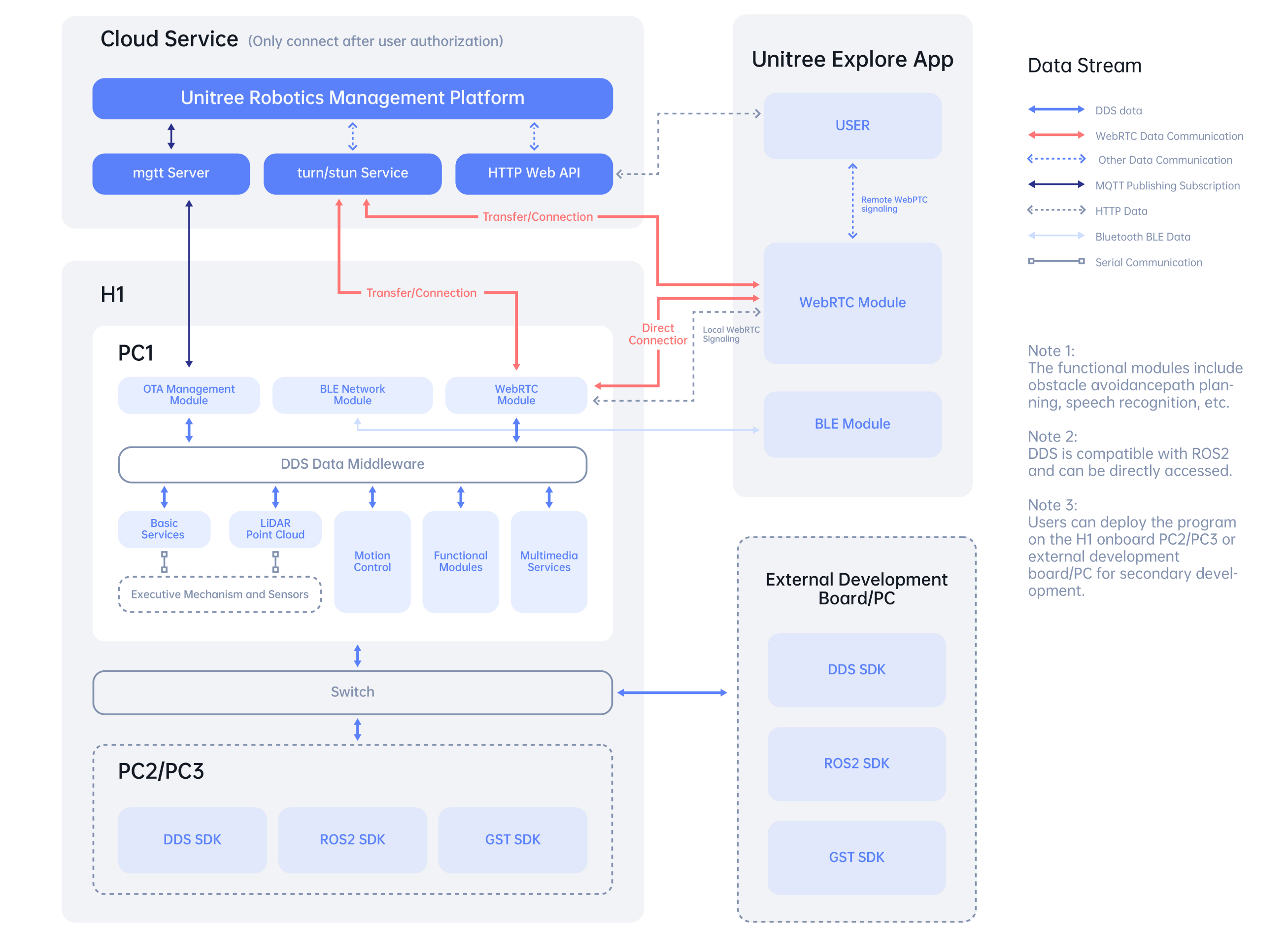
В своей структуре робот использует облачные службы и сервера.
- Осуществляет сбор данных об эксплуатации, ошибочном поведении и статистике.
- Помогает пользователям достигать функций удаленного управления через шлюз WebRTC. Отображая и контролируя трафик, которой можно прокинуть без обработки и анализа сервером.
- Выполняет обновления программного обеспечения. Коммуникация со службами достигается за счет MQTT брокера, который используется для глубокого взаимодействия со всеми участниками сети и выполняет мониторинг ошибок, системные обновления и передачу WebRTC сигналов. —
- Модуль коммуникаций OTA взаимодействует с облачной службой через MQTT и отвечает за принятие системных обновлений, выгрузку логов ошибок и проброс WebRTC сигналов.
- Модуль WebRTC исполняет роль основного канала данных с мобильным приложением включая аудио и видео потоки, облако точек вместе с матрицами преобразования, инструкции управления и движения вместе с текущими показателями.
- Протокол Bluetooth Low Energy (BLE) устанавливает контакт с приложением и служит для безопасной настройки основной сети и верификации.
- Коммуникация между каждым описанным модулем в основном исполняется на DDS сервере, который в свою очередь по средству DDS IDL обеспечивает “мост” с ROS2 только с локальной машины. В образовательной версии EDU можно вызывать интерфейсы отдельно, как через DDS, так и ROS2.
- Данные с датчиков такие как данные моторов и радаров собираются через последовательный порт и затем пересылаются на средний слой DDS.
- H1 включает в себя 3 отдельных компьютера. ПК1 выделен под программу движения Unitree и не может быть открыт публично. ПК2/ПК3 открыты для разработчиков и имеют следующие адреса 192.168.123.162 \ 192.168.123.163 соответственно.
Внешние интерфейсы разработчика
Поддерживаются следующие интерфейсы и их соответствующие средства для разработки:\
- DDS;
- ROS2;
- GST, только для стриминга изображение и видео.