Быстрый старт
В данном разделе будут описанные основыне действия, необходимые для начала работы с xArm6
Подключение
- Закрепите основание робота на прочной поверхости
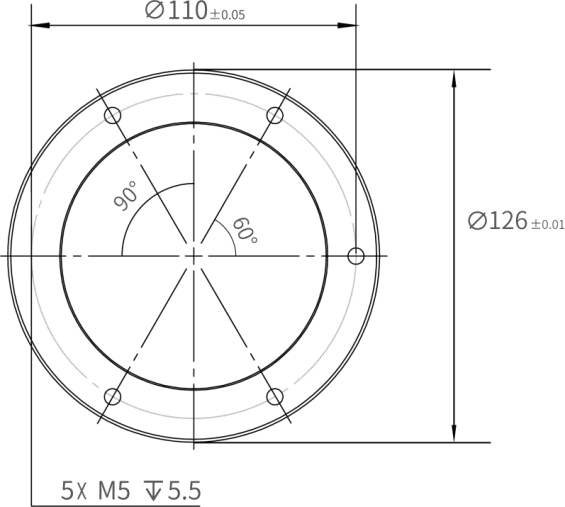
- Подключите робота через нижний разъем к ответной части на Блок управление;
Подключение робота к AC/DC Блоку управления не отличается, а лишь зависит от удобности использования источника постоянного или переменного тока
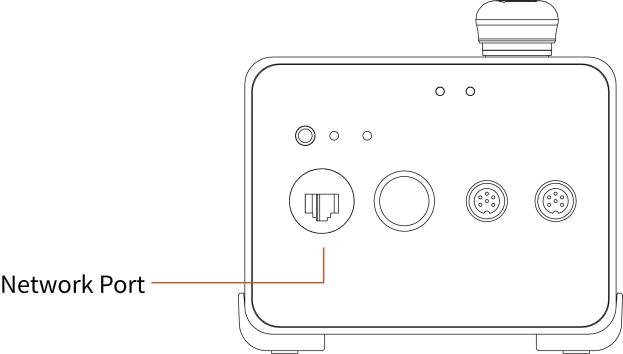
- Соедините ПК и Блок управления используя Ethernet-корд;
В итоге должно получиться в соотвествии с изображением ниже
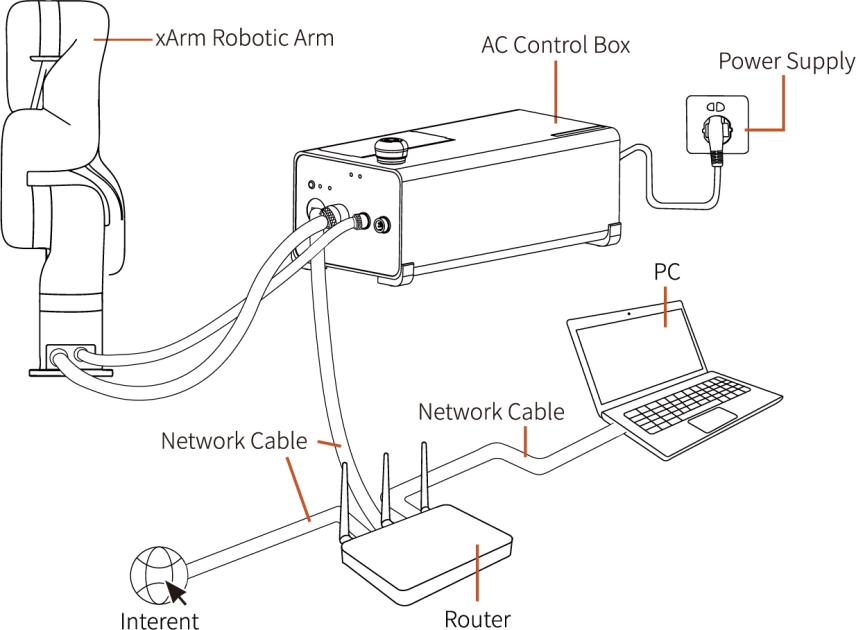
Подключив Блок управления к сети на нем должен зажечься Зеленый светодиод, индицирующий поданное питание на манипулятор;
- Установите ПК и блок управления в общую сеть (Адрес Блока управления указан на передней панели)
Инструкция для OC Windows
Перейдите в сетевые адаптеры и перейдите в параметры проводного сетевого устройства 
Во вкладке подробно выбрать Ipv4 метод 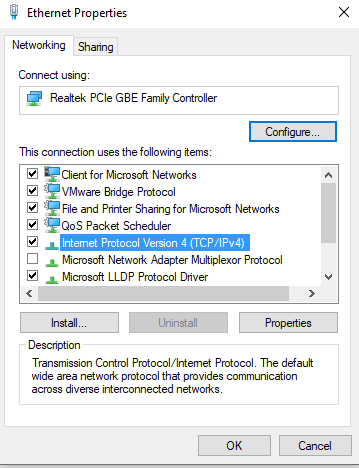
Переключить radiobox на установку IP и задать адрес в подсети Блока управления 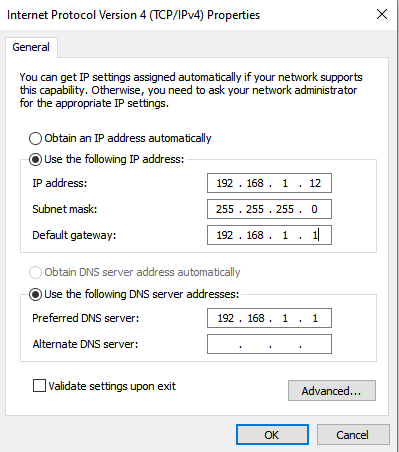
Инструкция для Linux
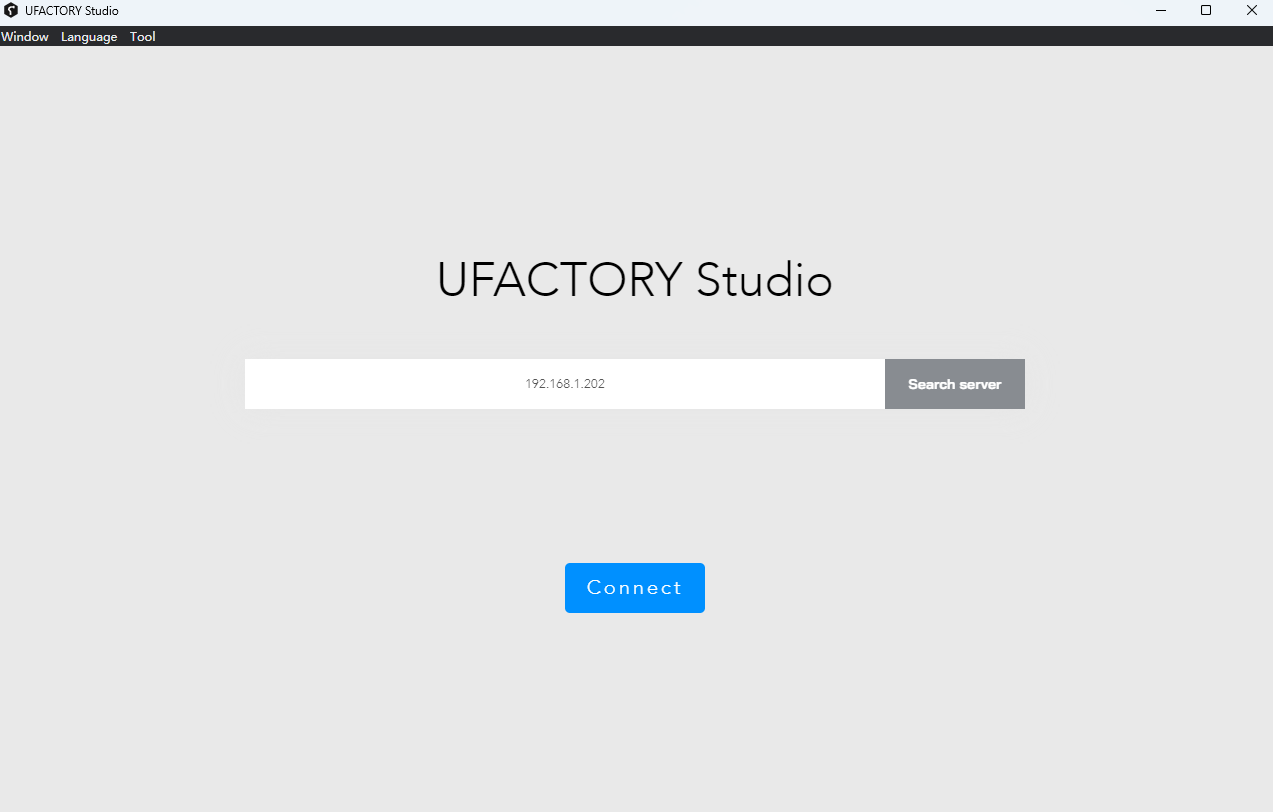
- Подключение к роботу доступно через приложение для Windows и MAC-xArmStudio и требует ввода IP-адреса Блока управления
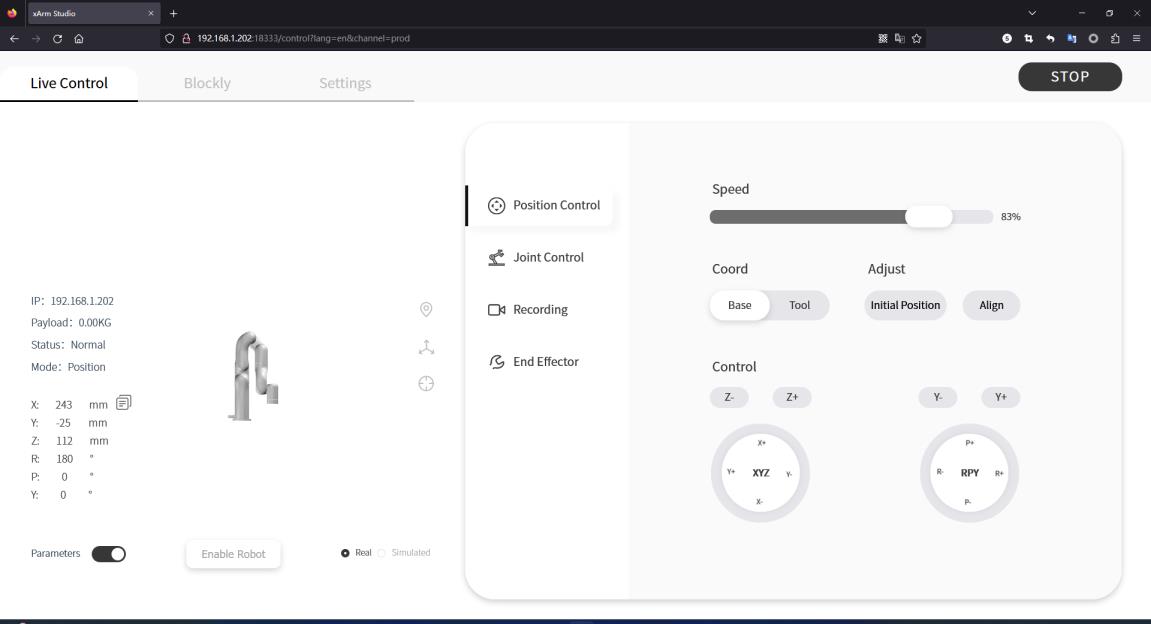
Либо используя WEB-интерфейc. Для доступа в поле адреса в Браузере введи ip:18333
Python SDK
[В РАЗРАБОТКЕ]