Быстрый старт
Начало работы
Требования к окружению
- угол наклона дороги ≤5°(при полной загрузке, иначе жидкости могут пролиться)
- отдельные неровности не больше 5 мм
- минимальная ширина проезда 80см, ширина дороги не менее 1.2м
- желательно использовать робота на твердной поверхности, ковры толщиной менее 10мм, чтобы избежать проскальзывания

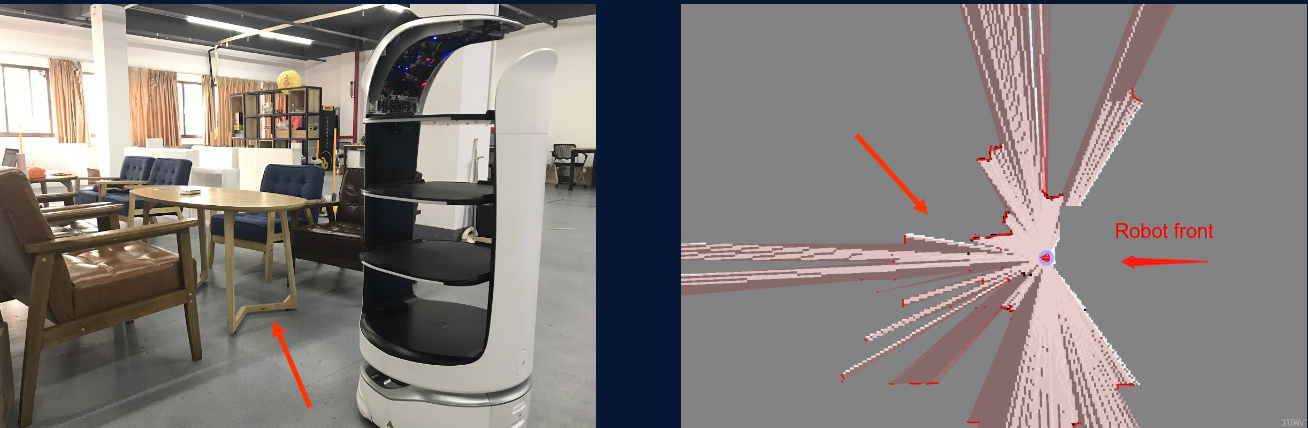
- При сканировании лидар может пропустить слишком тонкие (менее 20 мм в диаметре) препятствия (ножки столов, стульев и т.д.).Если есть подобные препятствия, их нужно соответствующим образом обработать, чтобы лидар мог стабильно идентифицировать такие препятствия. Если есть полностью черные, зеркальные или прозрачные объекты лидару трудно идентифицировать их на высоте до 30 см с обеих сторон дороги, поэтому необходимо наклеить темную наклейку на высоте 16-18 см от земли

Выбор начальной точки
Начальная точка должна быть напротив обычной стены с заметными препятсвиями(столб, углубления в стене)
Геометрическая структура перед начальной точкой очевидна, поэтому это место подходит в качестве начальной точки 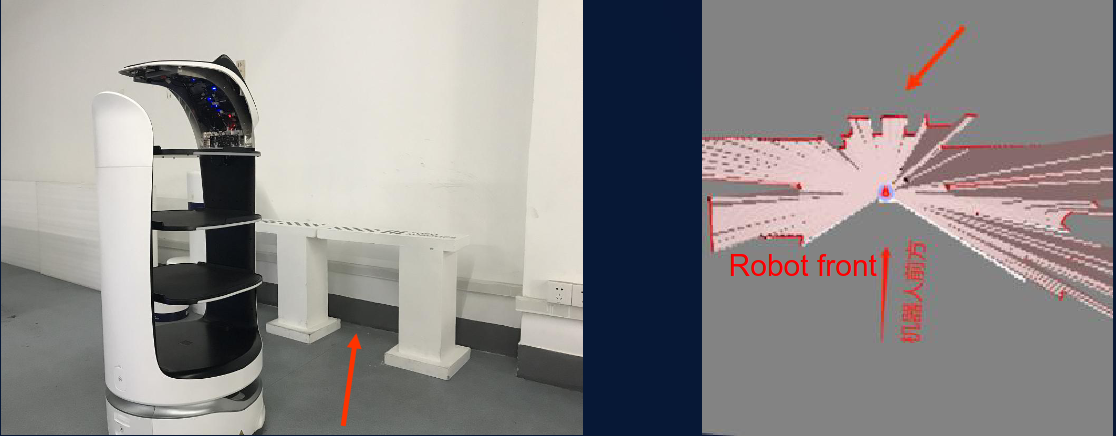
Перед начальной точкой стоят столы и стулья, которые легко могут перемещать и менять местами, поэтому это место не подходит в качестве начальной точки.
1.Каждый раз, когда робот включается, он должен находиться в начальной точке, а положение и ориентация робота должны такими же как при настройке начальной точки;
2.Когда в магазине находится несколько роботов, все они должны иметь общую карту, поэтому им также необходимо иметь общую начальную точку
Navigation Menu
Построение карты
- Установить робота в начальной точке и включить
- Открыть приложение

- Открыть настройки, пролистать вниз и открыть меню дебаг(пароль - pudupw)
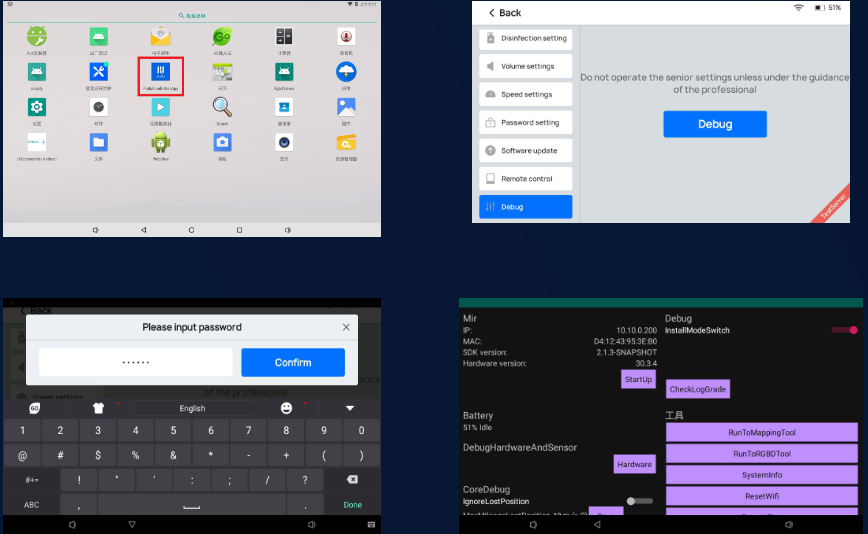
- Нажать RunToMappingTool
- Нажать Map manager, затем CREATE MAP
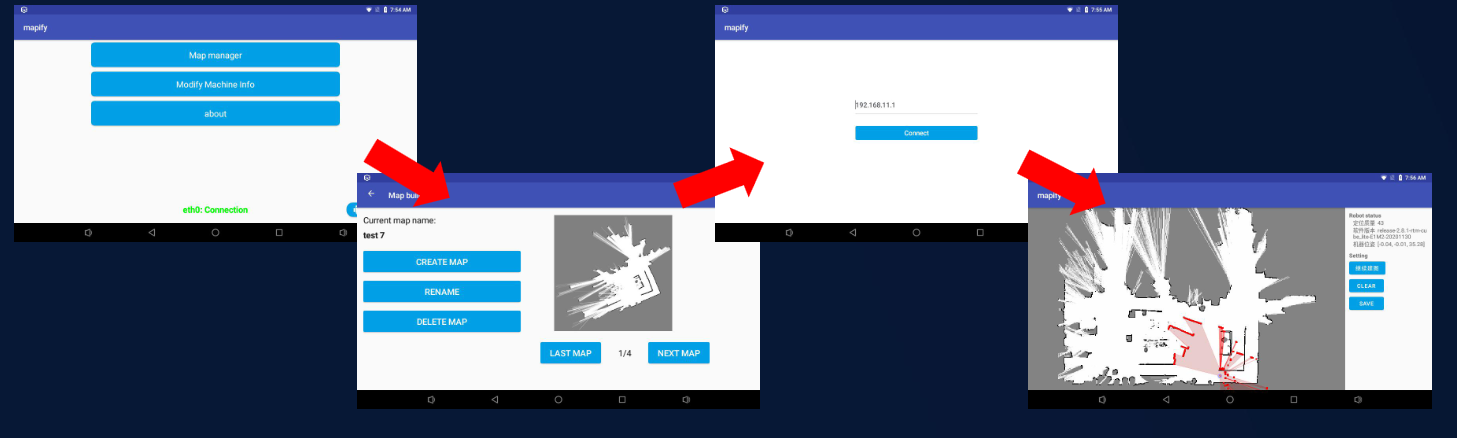
- Подключиться к стандартному IP - 192.168.11.1 (если это не удалось, попробуйте снова через минуту) на экране появится карта, на которой будет отображаться то, что отсканировал лидар - вы можете начать толкать робота для построения карты
- Если площадь построения большая разделите карту на несколько более маленьких участков и обходите их поочереди постепенно расширяя карту(рекомендуемая скорость движения 0.5 м/с избегайте проскальзывания колес)
После завершения построения карты она сохранится на роботе, чтобы добавить на карту точки необходимо выгрузить ее в программу на компьютере. Откройте программу и нажмите на кнопку network затем введите IP робота и подключитесь к нему
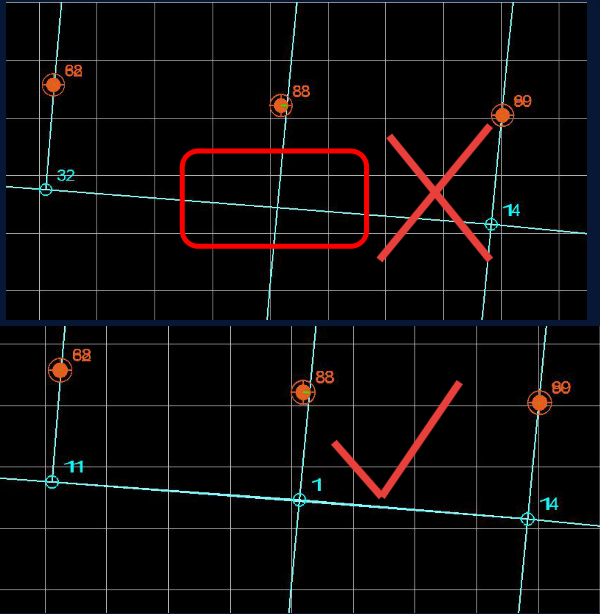
Правила построения маршрутов:
Длина одного пути (между двумя узлами) должна быть ≥1,2 м, как и расстояние между двумя соседними путями
Угол между путями составляет >45°;
Расстояние между точкой прибытия и траекторией <0,5 м;
Расстояние между точкой прибытия и узлом больше 0,2 м.
Нельзя допускать, чтобы два пути пересекались без добавления узла в точке пересечения
Необходимо добавить как минимум один стол и одну точку возврата и соеденить их для того, чтобы все работало, после этого нужно отправить карту на робота(при отправке вам предложа проверить карту, нажмите проверить перед отправкой и устраните недочеты, еси они есть)

Установите робота в начальной точке, при получении карты он проведет самодиагностику и будет готов к работе
Распространенные проблемы
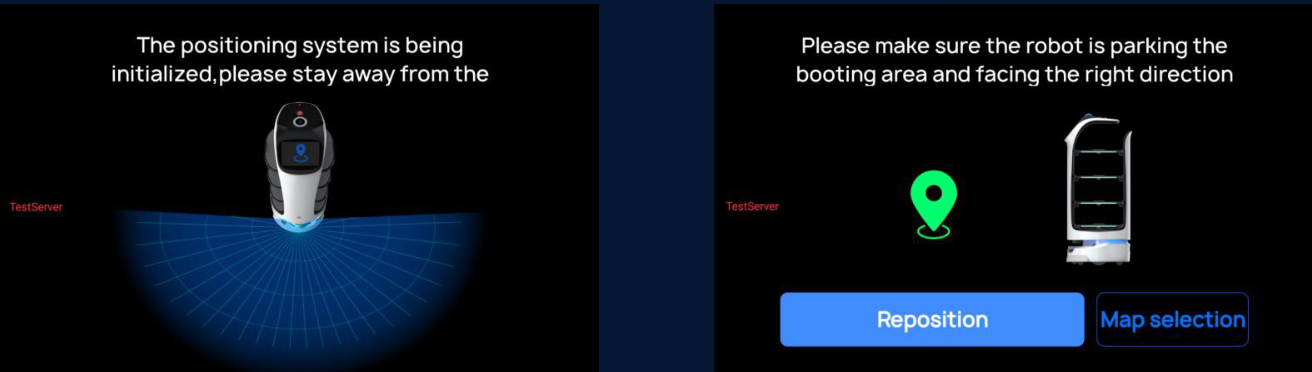
На экране робота отображается сообщение “location failed”
После самопроверки при включении питания робот выполнит позиционирование. Если при позиционировании произойдет сбой, на экране появится сообщение о сбое. Причины сбоя позиционирования следующие:
- Робот включен не в начальной точке
- Не карта на роботе и реальная местность
- Сцена текущей начальной точки сильно изменилась, что привело к сбою позиционирования
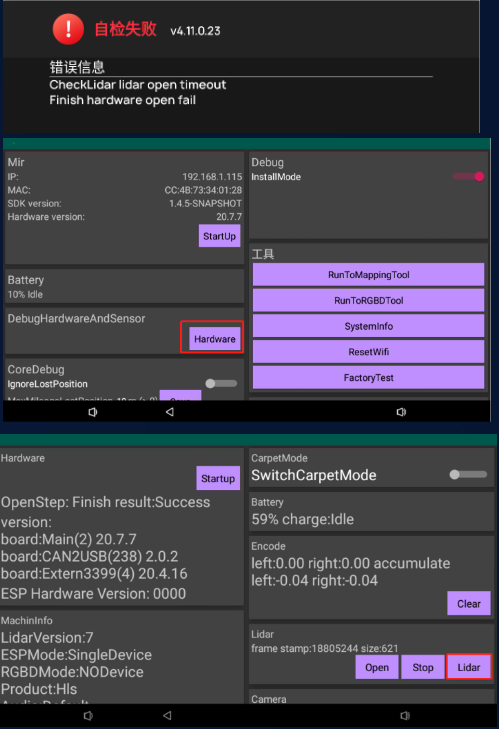
Сообщение “Check lidar open timeout”
- Проверьте нормально ли вращается лидар
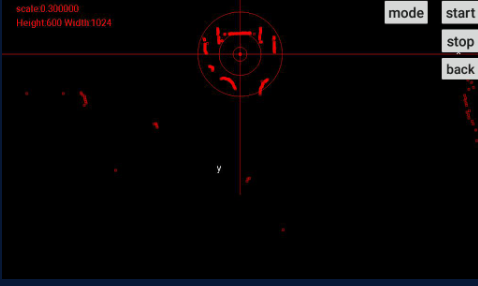
- Нажмите 5 раз на экран робота, затем hardware, затем lidar, если на экране появятся данные с лидара, то попобуйте перезагруить робота несколько раз
- Если лидар не вращается, нет лазера, нет данных на интерфейсе данных лидара, и перезапуск не помогает, то обратитесь в сервисный центр
Робот не заряжается
- Проверьте правильно ли закрыта крышка батарейного отсека в задней нижней части робота
- Откройте крышку батарейного отсека в нижней части задней части робота и проверьте, находится ли переключатель в положении ON
- Проверьте индикатор аккумулятора (красный свет при зарядке и зеленый свет когда батарея заряжена) если ничего не горит, значит аккумулятор поврежден, обратитесь в сервисный центр
Робот не включается
- Проверьте заряжен ли аккумулятор, попробуйте подключить зарядное устрйоство
- Проверьте закрыта ли крышка батарейного отсека и правильно ли установлена батарея
- Откройте крышку батарейного отсека и проверьте находится ли ключ в положении ON
- Примечание: Ключ в батарейном отсеке поворачивается по часовой стрелке в положение “ON”, против часовой стрелки в положение “OFF”, и обычно находится в положении “ON”.

Робот останавливается или вообще не едет
- Проверьте нет ли перед роботм препятсвий
- Проверьте не вылезают ли предметы в лотках за его пределы, при этом заслоняя датчики
- Не загрязнены ли датчики
- Соответствует ли ширина прохода робота минимальной ширине прохода робота (больше 80 см)
- Есть ли по пути следования робота объекты, которые могут отражать лучи лидара(например, зеркала, металлические отражающие поверхности и т.д.), если есть отражающие объекты, прикрепите матовые наклейки на расстоянии 16-18 см от земли;
- Не заблокирован ли или не поврежден ли потолочный маркер рядом с местом остановки робота.