Быстрый старт
Данное руководство дает базовую информацию по эксплуатации робособаки модели Lite3.
Jueying Lite3 — это интеллектуальный четвероногий робот с 12 степенями свободы, отличающийся разнообразием походок и движений. Jueying Lite3 Venture/Pro/LiDAR предоставляет SDK для разработки алгоритмов управления движением, исходный код некоторых примеров разработки восприятия и протокол связи, что позволяет пользователям переделывать по мере необходимости.
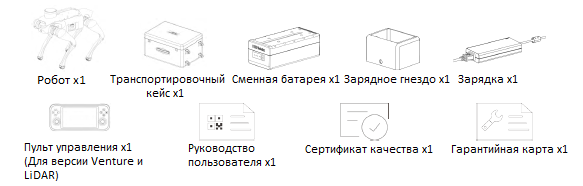
Комплект поставки
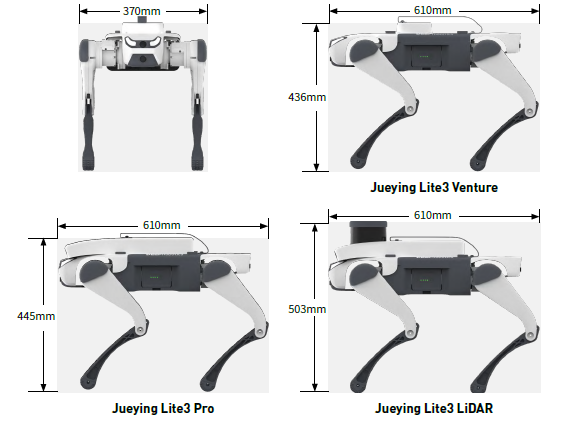
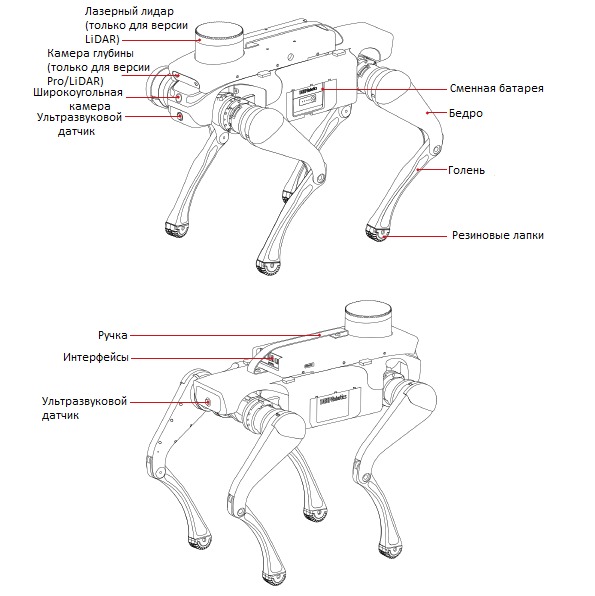
Описание робота
| Размеры робота | Venture | Pro | LiDAR |
| Длина | 610 мм | 610 мм | 610 мм |
| Ширина | 370 мм | 370 мм | 370 мм |
| Высота | 436 мм | 445 мм | 503 мм |
| Высота (сидя) | 145 мм | 175 мм | 225 мм |
| Вес | 12.2 кг | 12.7 кг | 13.7 кг |
| Параметры движения | Venture | Pro | LiDAR |
| Широкоугольная камера | x1 | x1 | x1 |
| Ультразвуковой датчик | x2 | x2 | x2 |
| Камера глубины | - | x1 | x1 |
| Лидар | - | - | x1 |
| AI компьютер | - | Nvidia Jetson Xavier NX | Nvidia Jetson Xavier NX |
| Системы восприятия | Venture | Pro | LiDAR |
| Угол наклона поверхности | 40 градусов | 40 градусов | 40 градусов |
| Высота ступеньки | 15 см | 15 см | 15 см |
| Время работы без нагрузки | 1.5 - 2 часа | 1.5 - 2 часа | 1.5 - 2 часа |
| Электрические параметры | |
| Ёмкость батареи | 4.4 Ач |
| Номинальное напряжение батареи | 28.8 В |
| Входное напряжение зарядного устройства | 100~240 В |
| Выходная мощность зарядного устройства | 33.6В/5А |
| Время зарядки | 40 минут - 1 час |
| Wi-Fi | |
| Диапазоны частот | 2.4GHz: 2.400GHz~2.497GHz 5GHz: 5.1GHz~5.9GHz |
| Максимальная выходная мощность | 802.11b/11Mbps: 18.5dBm±1.5dBm |
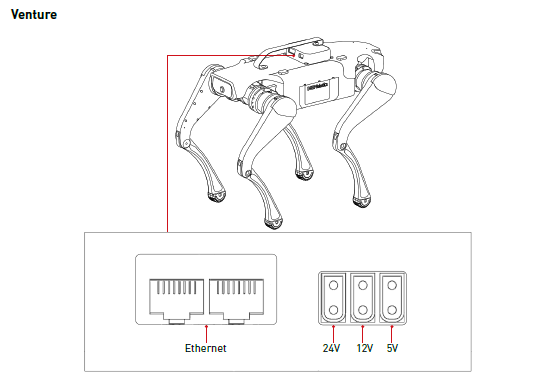
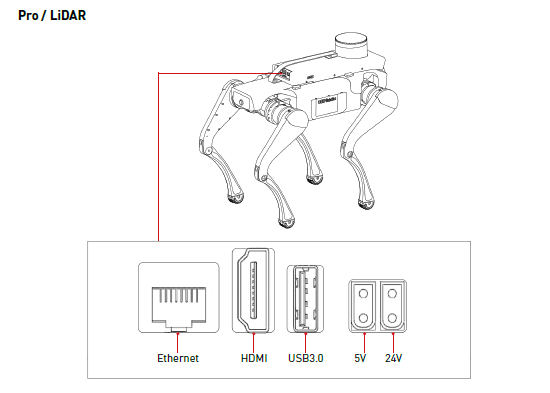
Интерфейсы робота
Описание индикации
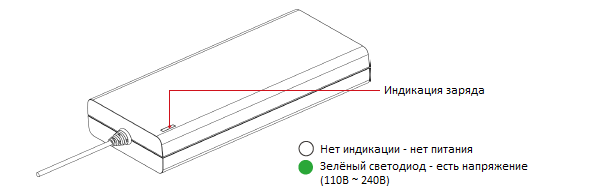
Зарядное устройство
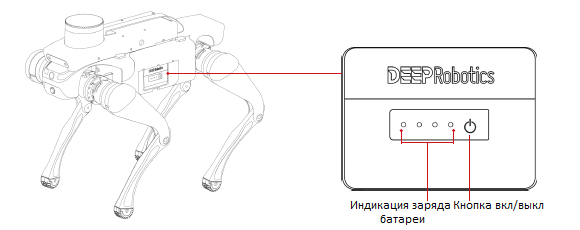
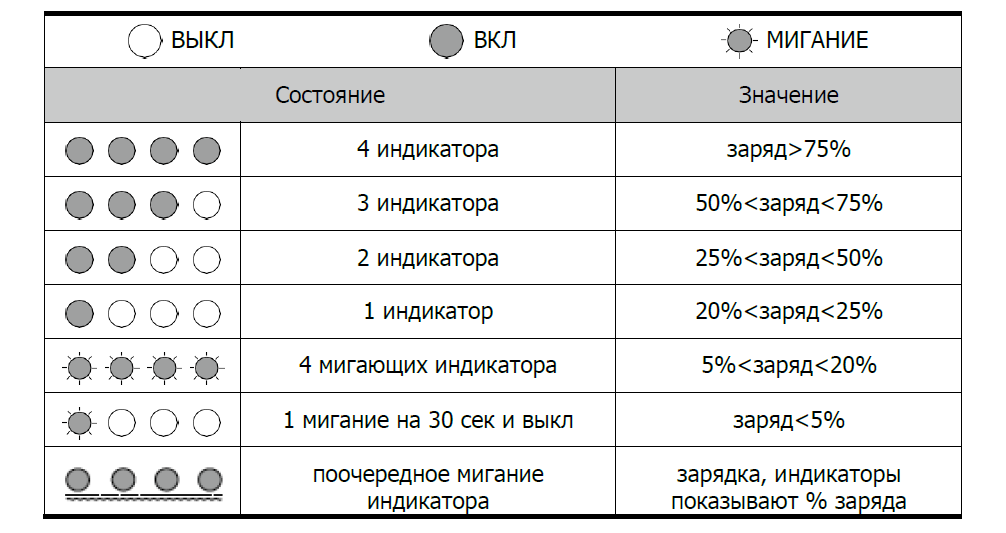
Аккумулятор
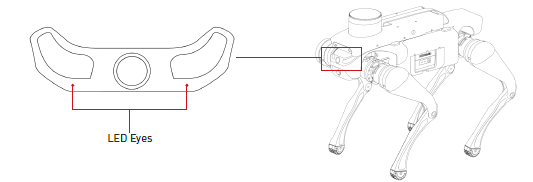
Светодиоды головы
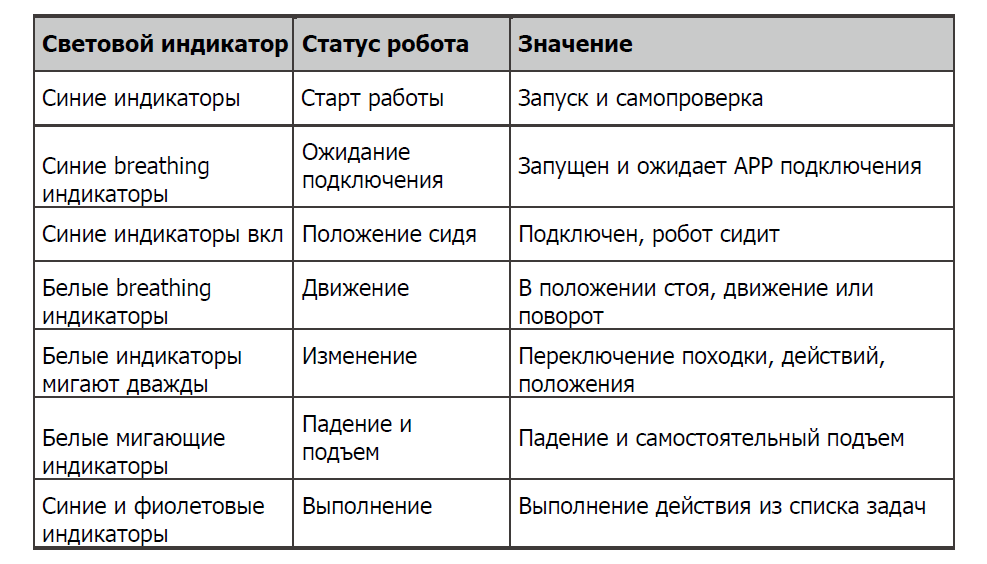
Нормальная индикация
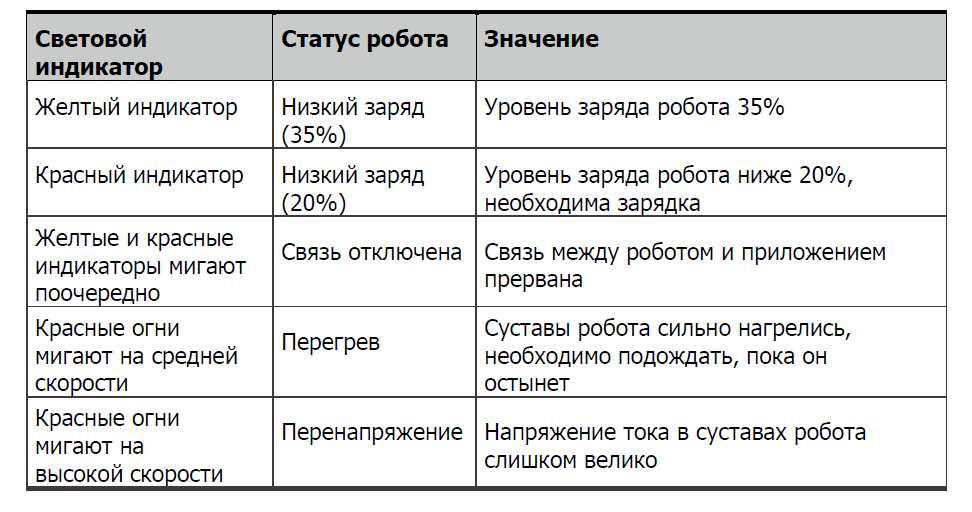
Аварийная индикация
Начало работы
1) Проверка • Проверьте индикатор батареи. Рекомендуется использовать робота, когда заряд батареи составляет не менее 75%. • Убедитесь, что кнопка аварийной остановки не нажата. • Убедитесь, что снаружи робота нет видимых повреждений.
Если детали робота повреждены, пожалуйста, не запускайте робота и своевременно свяжитесь с отделом послепродажного обслуживания.
• Пожалуйста, убедитесь, что присутствующие операторы и лица, не являющиеся операторами, прочитали внимательно изучите руководство и поймите основные инструкции по эксплуатации и меры предосторожности.
• Перед запуском робота убедитесь, что все присутствующие люди или предметы на расстоянии более 1 метра от робота, чтобы избежать столкновений.
• Используйте робота при температуре окружающей среды от 0°C до 40°C, однако ввиду отсутсвия влагозащиты электронной части, производитель не рекомендует к использованию при температуре ниже 5°C и влажности больше RH40%.
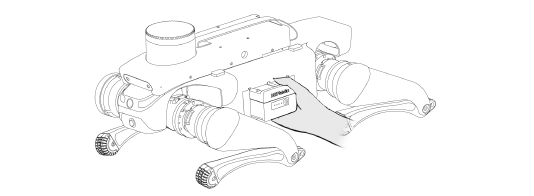
2) Поместите робота на ровную поверхность.

3) Отрегулируйте позу робота в соответствии с требованиями (как показано на рисунке выше): Cогните коленный сустав каждой конечности, удостоверьтесь, что колени каждой ноги робота смотрят строго вверх, а нижняя часть тела касается земли. 4) Включение питания. Нажмите кнопку питания на аккумуляторе, затем ещё раз нажмите и удерживайте кнопку питания, пока светодиодный индикатор не маргнёт один раз, робот запустится, а индикатор питания покажет текущий уровень заряда батареи.
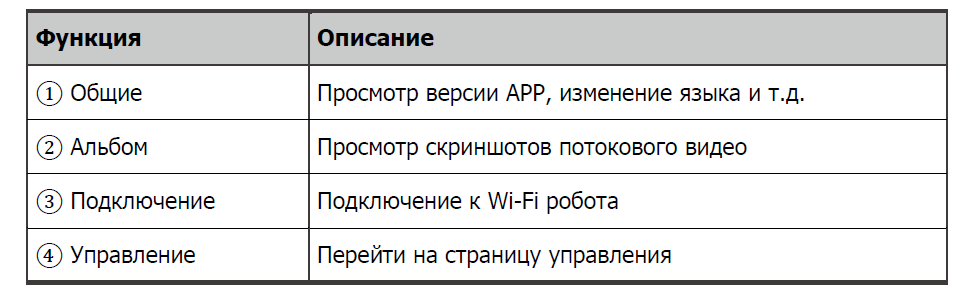
Подключение через приложение
- Приложение «DEEP Robotics» поддерживает Android 6.0 или более позднюю версию и пока не поддерживает iOS.
- Откройте приложение «DEEP Robotics» на пульте дистанционного управления.
- Проверьте информацию о WiFi на наклейке на животе робота и нажмите в приложении кнопку [③Connect] для подключения. После завершения подключения вы можете нажать кнопку [④Control], чтобы войти в меню управления и управлять роботом.

Управление роботом
Домашняя страница приложения

Меню управления
Для перехода в меню управления, нажмите на [④Control]. 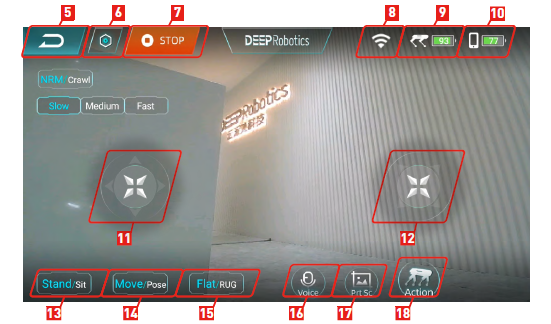
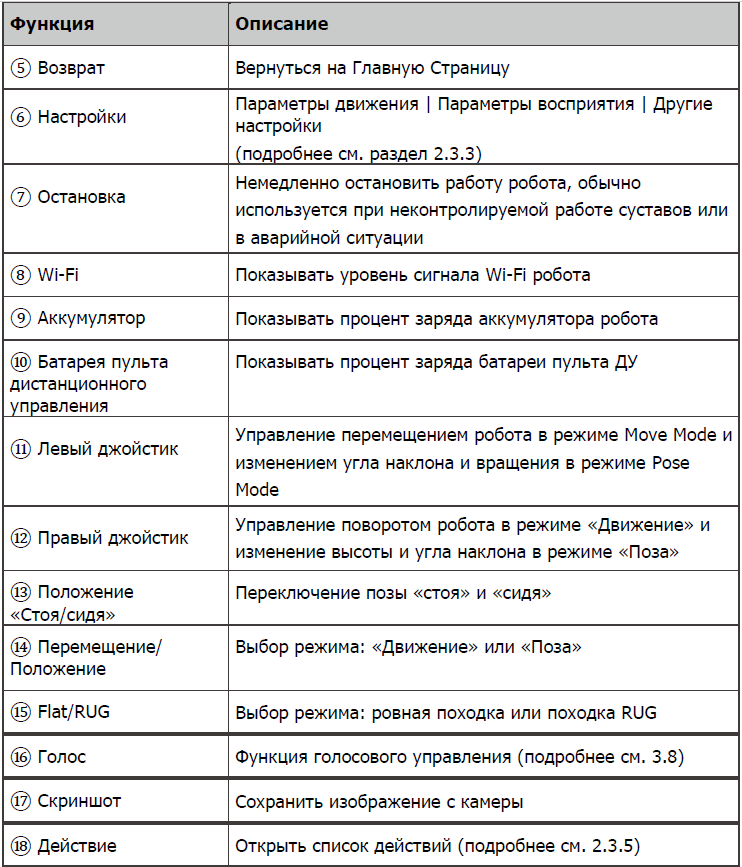
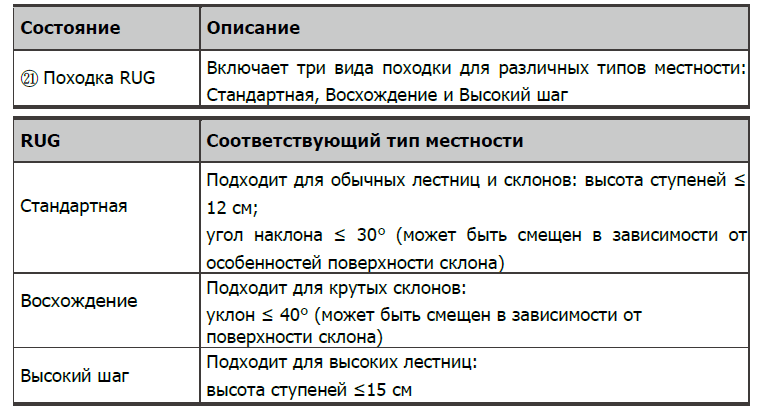
Виды походок
Для смены походки, нажмите [⑮Flat/RUG]. 
 Для перемещения по неровным поверхностям выберите походку RUG.
Для перемещения по неровным поверхностям выберите походку RUG. 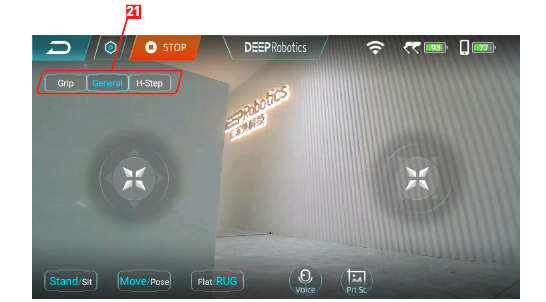
Для доступа к списку развлекательных сценариев нажмите кнопку [⑱Action]. 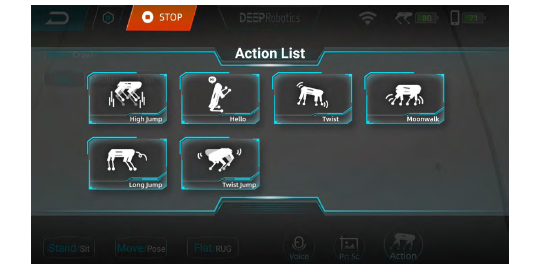
Робот может выполнять такие действия, как прыжок в высоту, приветствие, поворот, лунная походка, прыжок в длину, прыжок с поворотом.
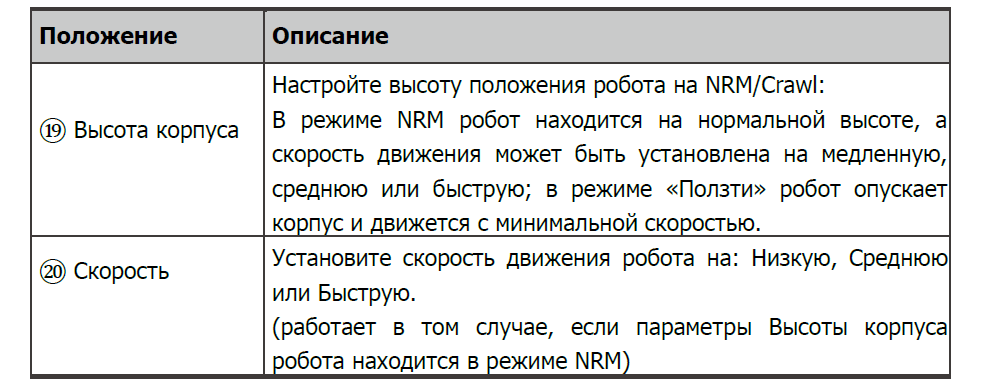
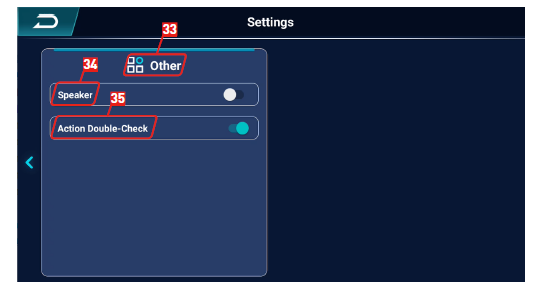
Меню настроек
Чтобы перейти в меню настроек нажмите [⑥Settings] в меню управления. 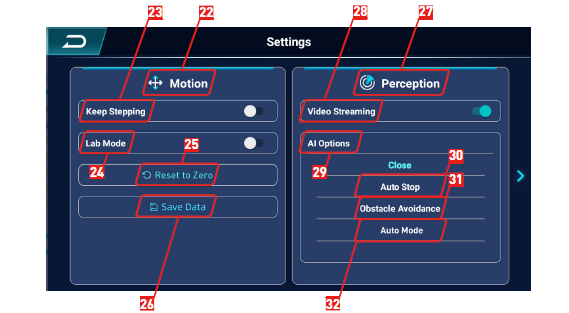

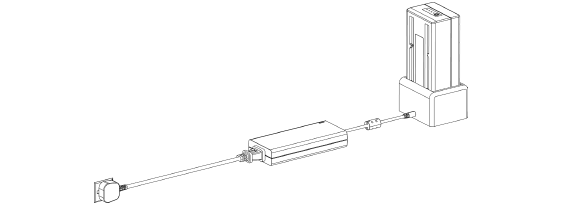
Зарядка
Jueying Lite3 питается от тройной литиевой батареи. Постановка аккумулятора на зарядку.
- Сначала слегка приподнимите робота с левой стороны, а затем нажмите кнопку в нижней части батарейного отсека, и аккумулятор выдвинется, после чего его можно извлечь из аккумуляторного отсека.
- Вставьте аккумулятор в зарядное гнездо, подключите зарядное гнездо к зарядному устройству, а затем подключите зарядное устройство к сети (100–240 В) для зарядки, при этом индикатор зарядного устройства загорится зеленым.
- Во время зарядки все светодиоды аккумулятора мигают, а количество включенных индикаторов соответствует уровню заряда.
- После завершения зарядки четыре светодиода на аккумуляторе погаснут.
Разработка
Подключение к внутреннему ПК необходимо для доступа к разработке и выполняется по средству подключения к встроенной WiFi-сети или к Ethernet порту на роботе. Команды SDK можно исполнять напрямую на компьютере или на удаленном хосте.
- Первое подключение обязательно осуществляется через Ethernet порт на спине робота;
- Motion Host, который является основным ПК для сторонней разрабоки имеет IP 192.168.1.120 , поэтому первым делом при подключении необходимо установить удаленный ПК в сегмент сети 192.168.1.*, где * любое число от 2-255 исключая 120;
- Для связи используйте telnet или ssh-соединение
ssh имя_пользователя@192.168.1.120Возможны следующие комбинации данных, которые могут пересекаться в комбинации по диагоналям, например user:firefly или firefly:’
| Возможные пользователи | Возможные пароли |
|---|---|
| ysc | ’ |
| user | 12345 |
| firefly | firefly |
- Для обратной связи MotionSDK с удаленным компьютером перейдите в директорию ~/jy_exe/conf
cd ~/jy_exe/confОтредактируйте файл network.toml
ip = '192.168.1.102' # Motion host will send data to this IP address target_port = 43897 local_port = 43893Заменив параметр ip на адрес, который был присвоен удаленному хосту.
- После внесения изменений перезапустите основную программу
cd ~/jy_exe/scripts sudo ./stop.sh sudo ./restart.sh
Актуальную информацию по разработке можно найти по следующим ссылкам:
Часто задаваемые вопросы
Q1: Что делать, если приложение не может подключиться к роботу?
A: Сначала проверьте, включено ли питание на роботе и нет ли другой версии приложения (обновления) в фоновом режиме. Если приложение по-прежнему не может подключиться к роботу, перезапустите робота и приложение и повторите попытку.
Q2: Нормально ли, что робот перестает двигаться самостоятельно?
A: Двигатель или привод могут быть защищены от перегрева. Пожалуйста, подождите 10 минут и повторите попытку. Если вы по-прежнему не можете управлять движением робота, проверьте, полностью ли заряжена батарея, отключена ли кнопка жесткой аварийной остановки (в выключенном состоянии она светится синим цветом) и подключен ли джойстик к Wi-Fi робота.
Q3: Что делать, если нет ответа на команды из приложения после подключения?
A: Сначала проверьте, отключена ли аварийная остановка (кнопка горит синим, когда она выключена). Затем убедитесь, что джойстик подключен к правильному роботу. Если приложение по-прежнему не может управлять роботом, подождите 10 секунд и повторите попытку.
Q4: Что делать, если столкнулись с проблемой, которую невозможно решить даже после ознакомления с данным руководством?
A: Нажмите [Сохранить данные] на странице настроек приложения и своевременно свяжитесь с отделом послепродажного обслуживания.