Снятие логов
Логи спортпрограммы
Логи спортпрограммы можно получить только на роботе модели Go1
Процесс Legged_sport при работе ведет логи в файл /home/pi/Unitree/autostart/sportMode/log. Файл перезаписывается при каждом включении. Логи носят отладочную информацию и предназначены для разработчиков. Однако простой пользователь интуитивно может также подчерпнуть полезную информацию.
Вот пример файла логов:
UDP Initialized. socketfd: 9 Port: 8008
UDP Initialized. socketfd: 10 Port: 8010
UDP Initialized. socketfd: 11 Port: 8082
UDP Initialized. socketfd: 12 Port: 8018
[Wait] for check
Check passed
GO1 EDU
[Wait] for trigger: SDK or L1 + start
[UDP Connected] client! Client IP:192.168.123.161 port:8091
SDK trigger detected
Be triggered
[UDP Disconnected] client! socketfd:11 Old Client IP:192.168.123.161 port:8091
[UDP Connected] client! Client IP:192.168.123.161 port:8083
[UDP Connected] client! Client IP:192.168.123.161 port:8084
[UDP Disconnected] client! socketfd:11 Old Client IP:192.168.123.161 port:8083
[CONTROL FSM] State changed to LOCOMOTION due to velocity command!
No available obstacle range data !
[CONTROL FSM] State changed to stand due to NO velocity command!
[CONTROL FSM] State changed to LOCOMOTION due to velocity command!
[Trigger CMD]: START
[Trigger CMD]: Double START
[Trigger CMD]: START
[Trigger CMD]: L2 + A
[Trigger CMD]: L2 + A
[Trigger CMD]: L2 + A
[Trigger CMD]: Double START
[Trigger CMD]: START
[Trigger CMD]: L1 + A
## size: 92
switch to move: 0
time: 1.66851e+12 torso_vertical
1 92
## size: 92
switch to move: 1
time: 1.66851e+12 move_hand_1
1 92
#@ 203 2193 1990
# 3314 4382.637207 404.670990
0 2193
@@@@@@@@@@@@$$$$$$$$$$$$$$$$$@@@
switch to move: 2
time: 1.66851e+12 pre_stance
1 92
## size: 92
Dance is over this time.
[Trigger CMD]: Double START
[Trigger CMD]: START
Как минимум в нем можно увидеть комбинации клавиш нажимались, какие скрипты выполнялись.
А вот пример логов при отсутствии связи с одним из моторов:
UDP Initialized. socketfd: 9 Port: 8008
UDP Initialized. socketfd: 10 Port: 8010
UDP Initialized. socketfd: 11 Port: 8082
UDP Initialized. socketfd: 12 Port: 8018
[Wait] for check
Check passed
GO1 EDU
[Wait] for trigger: SDK or L1 + start
[UDP Connected] client! Client IP:192.168.123.161 port:8091
SDK trigger detected
Be triggered
[EM_DAMP]: Some joint may get stuck4
[UDP Disconnected] client! socketfd:11 Old Client IP:192.168.123.161 port:8091
[UDP Connected] client! Client IP:192.168.123.161 port:8083
[UDP Connected] client! Client IP:192.168.123.161 port:8084
[UDP Disconnected] client! socketfd:11 Old Client IP:192.168.123.161 port:8083
Здесь присутствует строчка [EM_DAMP]: Some joint may get stuck4 - один из узлов “застрял”. Понять какой именно мотор не отвечает с помощью этих логов нельзя, для этого придется воспользоваться отладочным портом - Type-C разъем на спине робособаки.
Получение данных через Type-C
Основная плата управления в реальном времени постоянно отправляет поток отладочных данных, которые используются для диагностики. На спине робота Go1 располагаются два Type-C. Подключаемся к тому из них, который расположен ближе к голове.
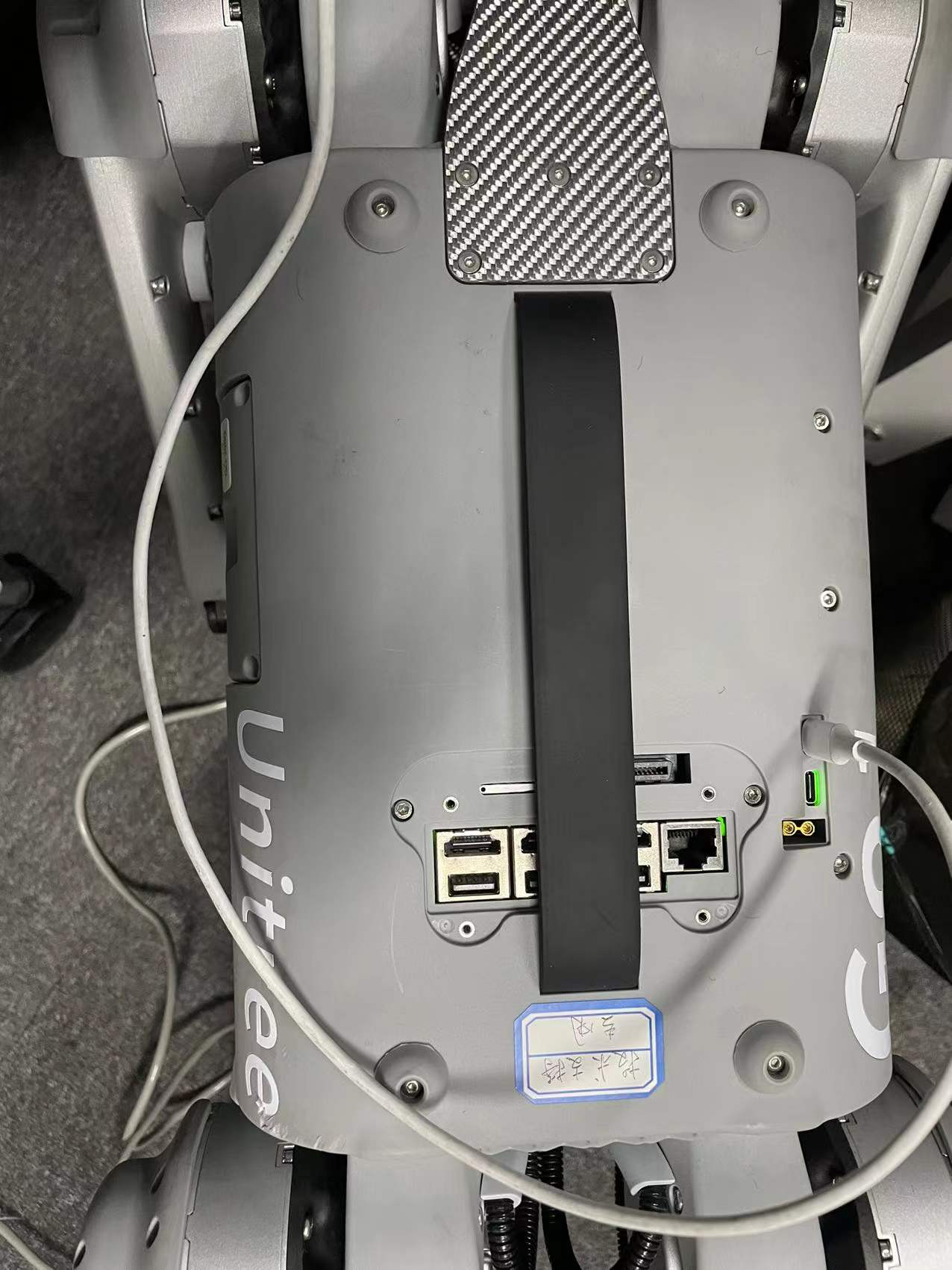
Устройство (робособака) должно определиться как COM-порт 1. Любым терминалом (например putty) слушаем этот COM-порт.
Скорость: 115200
Формат кадра: 8-N-1
Пример вывода:
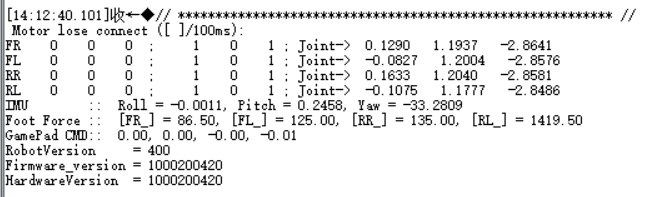
-
При отсутствии драйвера обратитесь на наш портал техподдержки. ↩