Быстрый старт
В данном разделе содержится только базовая информация по быстрому началу с роботами на BellaBot Pro на PUDU OS
Начало работы
Активация продукта
Пользователь получает робота в неактивированном состоянии. Для активации робота Он должен обратиться на портал технической поддержки ROBOHELP и передать необходимые данные:
- Наименование компании
- Дата покупки
- Предположительный регион использования робота (Например, Воронежская область, г.Воронеж)
- Серийный номер робота
- Электронный почтовый ящик, на который будет привязан аккаунт В ответ пользователь получает данные для входа в личный кабинет Бизнес платформа PUDU и активированного робота, готового к работе.
Проверьте почтовый ящик, там будут данные авторизации от аккаунта, сохраните их. Пароль рекомендуется изменить! 
Шаг 1. Подготовка и запуск
Успешная и стабильная работа робота BellaBot Pro напрямую зависит от соответствия помещения техническим требованиям. Проверка этих условий перед установкой критически важна для избежания сбоев в работе и повреждения оборудования.
1. Климатические условия и помещение
- Эксплуатация: Робот предназначен для работы исключительно внутри отапливаемых помещений. Запрещено использование на улице, под открытым небом, под прямыми солнечными лучами, а также в условиях повышенной влажности (например, в холодильных камерах, моечных цехах).
- Температура: Рабочий диапазон температур от +5°C до +45°C.
- Влажность: От 10% до 85% относительной влажности, без конденсации.
- Покрытие пола: Поверхность должна быть сухой и чистой. Категорически запрещена эксплуатация на мокрых, жирных или скользких поверхностях (после разлива жидкости их необходимо немедленно убрать).
2. Требования к поверхности пола
Поверхность, по которой перемещается робот, должна обеспечивать стабильность и безопасность перевозки грузов.
- Ровность: Допустимый перепад высот на стыках покрытий (плитка, ковролин, стыки плит) не должен превышать 10 мм.
- Уклон: Максимально допустимый уклон для безопасного движения не более 5% (~3°). Больший уклон может привести к опрокидыванию или проливу содержимого подносов.
- Материалы: Робот адаптирован для работы на большинстве типов покрытий: керамическая плитка, laminate, наливной пол, терраццо, коротковорсовый ковролин (высота ворса не более 10 мм), резиновые покрытия.
- Зазоры: Глубина зазоров (например, между плиткой и лифтом) не должна превышать 30 мм, а ширина — 50 мм.

3. Требования к пространству и навигации
- Ширина проходов:
- Абсолютный минимум для проезда в одну сторону: 0.65 м.
- Рекомендуемая ширина для комфортного и безопасного проезда: не менее 0.8 м.
- Для двустороннего движения (например, чтобы робот мог разъехаться с человеком или другим роботом) ширина коридора должна быть не менее 1.2 м.
-
Дверные проемы: Минимальная ширина дверного проема должна составлять 0.7 м. Рекомендуется 0.8 м и более.
- Окружающая обстановка: Для точной навигации с помощью системы VSLAM (визуальная одометрия) роботу необходимы визуальные ориентиры. Стены и проходы не должны быть абсолютно пустыми и однородными (например, длинные монотонные белые стены без дверей, плакатов или других деталей). Разместите на стенах декор, картины или информационные стенды для улучшения навигации.
4. Идентификация особых и опасных зон
Некоторые объекты и зоны требуют особого внимания при построении карты.
- Тонкие препятствия: Лазерный лидар (LIDAR) может не обнаруживать тонкие объекты диаметром менее 30 мм (ножки стульев и столов, торшеры, тонкие поручни). Такие объекты необходимо вручную отметить на карте как виртуальные стены или запретные зоны во время процесса настройки.
- Зеркальные и стеклянные поверхности: Большие зеркала, стеклянные стены и двери могут дезориентировать систему навигации. Рекомендуется оклеить их матовой пленкой на высоту проезда робота или отметить на карте зоной сниженной скорости.
- Черные и поглощающие поверхности: Глубоко матовые черные поверхности (стены, ковры) могут поглощать сигнал лидара и восприниматься как бесконечное пространство. Их необходимо огородить физическими препятствиями или отметить на карте.
- Опасные зоны: Лестницы, пандусы с крутым уклоном, зоны погрузки, лифтовые шахты должны быть обязательно обозначены на цифровой карте робота как запретные зоны с отступом не менее 0.5 м для создания буфера безопасности.
- Электрические кабели и провода: Категорически запрещено наличие незакрепленных (лежащих на полу) электрических кабелей, проводов удлинителей или сетевых шнуров на пути следования робота.

Шаг 2. Запуск
Перед запуском стоит осмотреть робота. При выявлении любых внешних дефектов, механических повреждений корпуса Не включайте робота, Не пытайтесь самостоятельно починить.
Для предотвращения случайного включения и повреждений в робота встроена специальная защита от самозапуска во время перевозки устройства с установленным аккумулятором,. Устройство будет оставаться в заблокированном состоянии до тех пор, пока вы не подключите его к оригинальному сетевому зарядному устройству. Только после подключения к зарядке защитный режим автоматически снимается, и устройство можно будет включить в штатном режиме. Не пытайтесь активировать его другими способами — это предусмотрено конструкцией для вашей безопасности и сохранности техники.
Запускать робота нажав и удерживая кнопку на затылке  После включения светодиоды на подносах робота перемигнут и спустя ~30-40 секунд робот запустится.
После включения светодиоды на подносах робота перемигнут и спустя ~30-40 секунд робот запустится.
Если при запуске робота, например с другой зоны, на роботе уже существует карта другой территории, а на новой территории необходимо создать свою карту для прерывания локализации робота и перехода к взаимодействию с интерфейсом настроек держите два пальца на любой части экрана около 20 секунд пока не появится доступ к интерфейсу 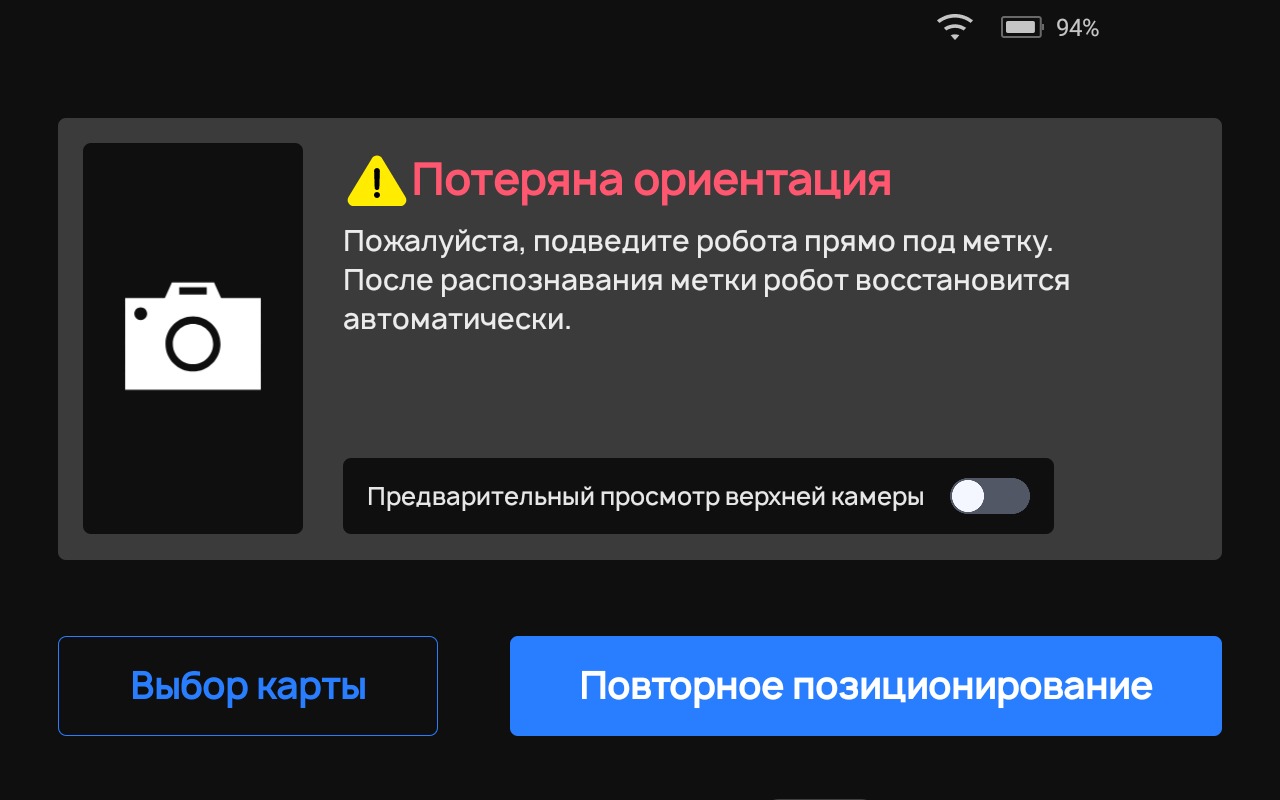
Шаг 3. Создание первой карты.
Запустив робота, если нет карт, робот предложит создать новую - необходимо перейти в [Начать составление карты]; 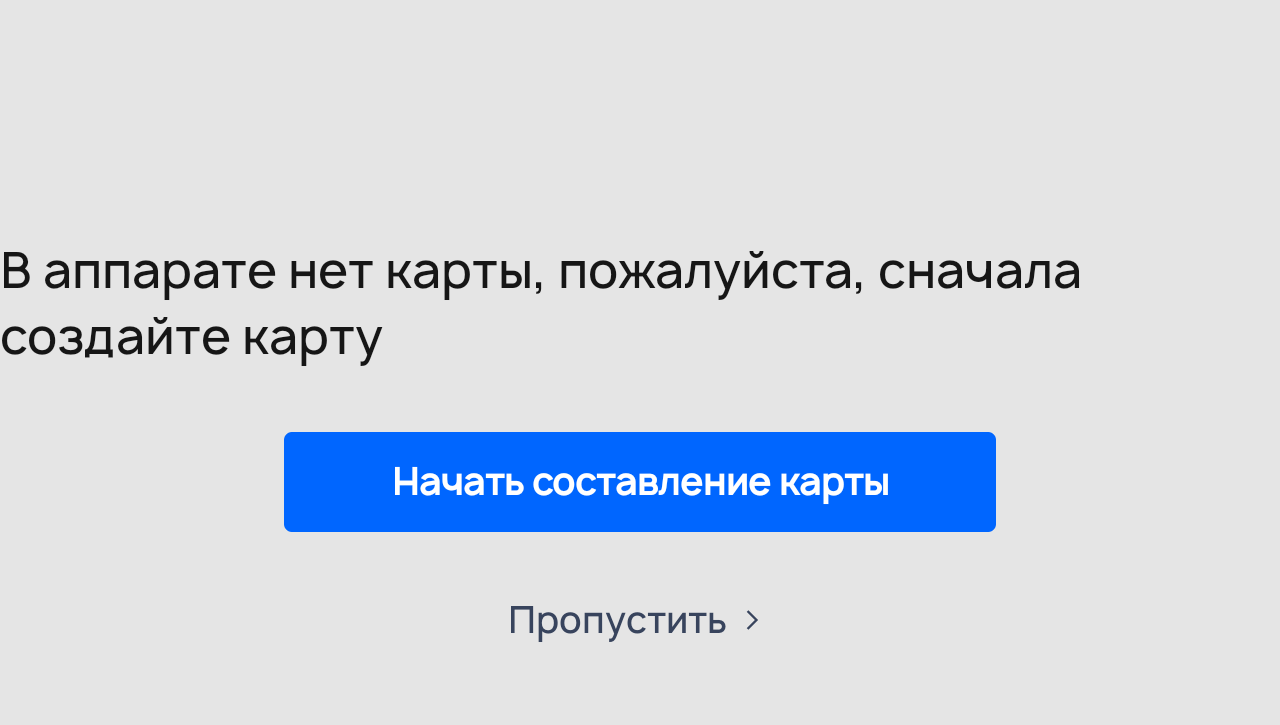 Нажмите [Синхронизация] сверху справа, если уже владеете роботами на этой точке для синхронизации карт с других роботов, в ином случае нажмите [Добавить] для создания новой карты на месте;
Нажмите [Синхронизация] сверху справа, если уже владеете роботами на этой точке для синхронизации карт с других роботов, в ином случае нажмите [Добавить] для создания новой карты на месте; 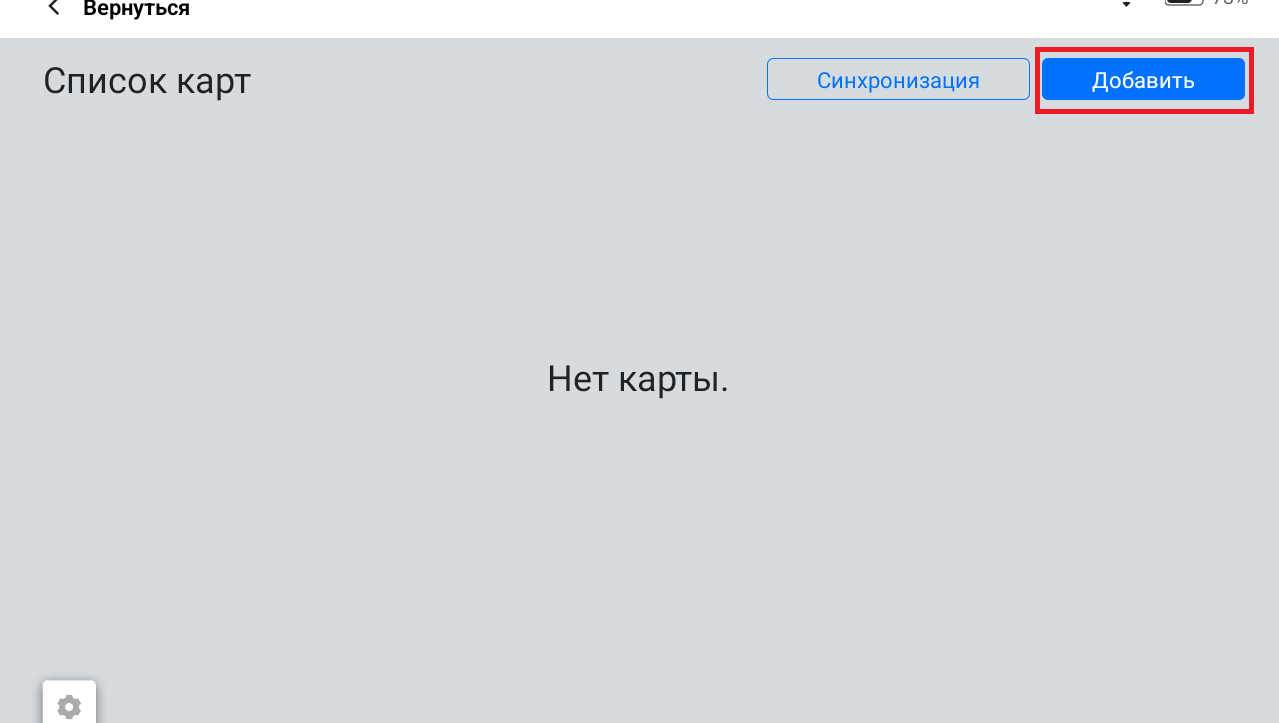 Введите название карты
Введите название карты 
Для смены и добавления раскладки клавиатуры используйте мануал Системные настройки - Установка раскладки
Для робота BellaBot Pro рекомендуется использовать метод VSLAM + Laser, как самый точный и стабильный. Выберите VSLAM + Laser и нажмите [Продолжить] 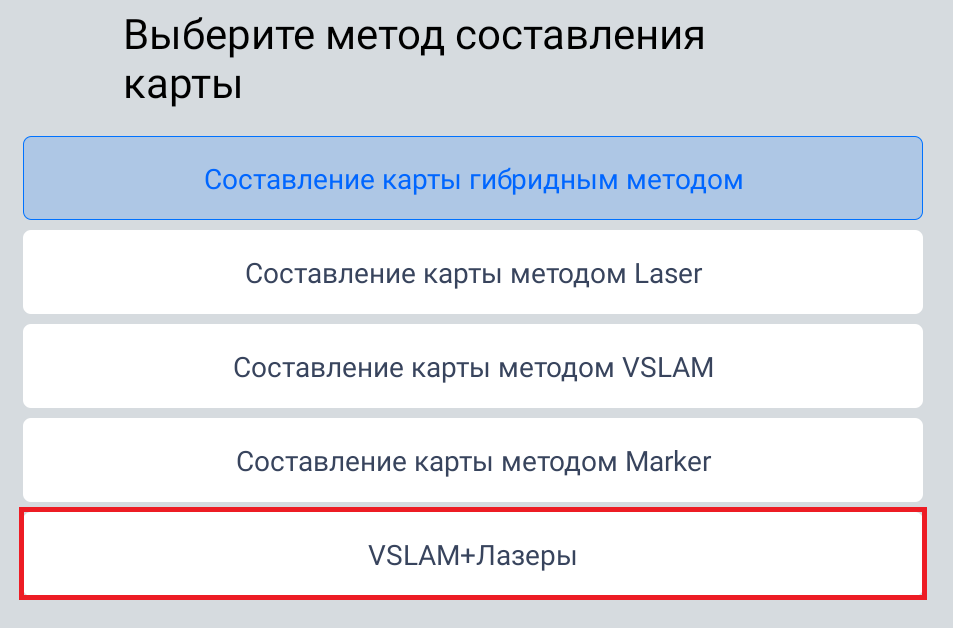
Метод Laser: Способ построения карты, использующий только данные лидара (лазерного сканера). Не рекомендуется, если планировка помещения (расположение мебели, предметов) часто меняется. При использовании этого метода, запускайте робота из угла помещения.
Метод Marker: Способ построения карты, использующий только специальные отражающие метки (маркеры) на потолке. Не рекомендуется для помещений с очень низкими (менее 2.2 м) или очень высокими (более 4.5 м) потолками.(Метки отсутсвуют в комплекте с роботом)
Метод VSLAM: Способ построения карты, использующий только уникальный рисунок потолка (светильники, балки, узоры). Не требует меток.
Гибридный метод: Самый мощный метод, объединяющий три метода выше (Laser, Marker, VSLAM) плюс данные со специальных 3D-камер для точного сканирования объема. Требует установки меток.
Метод VSLAM + Laser: Продвинутый метод, объединяющий алгоритмы VSLAM (рисунок потолка) и Laser (лидар). Использует дополнительные данные с 3D-камеры. Как и в методе Laser, рекомендуется начинать построение карты из угла помещения. Однако, если есть место с четким и уникальным рисунком потолка, можно начать построение карты с любого места.
Ознакомьтесь с рекомендациями и мерами предостарожности, нажмите [немедленно начать] для продолжения 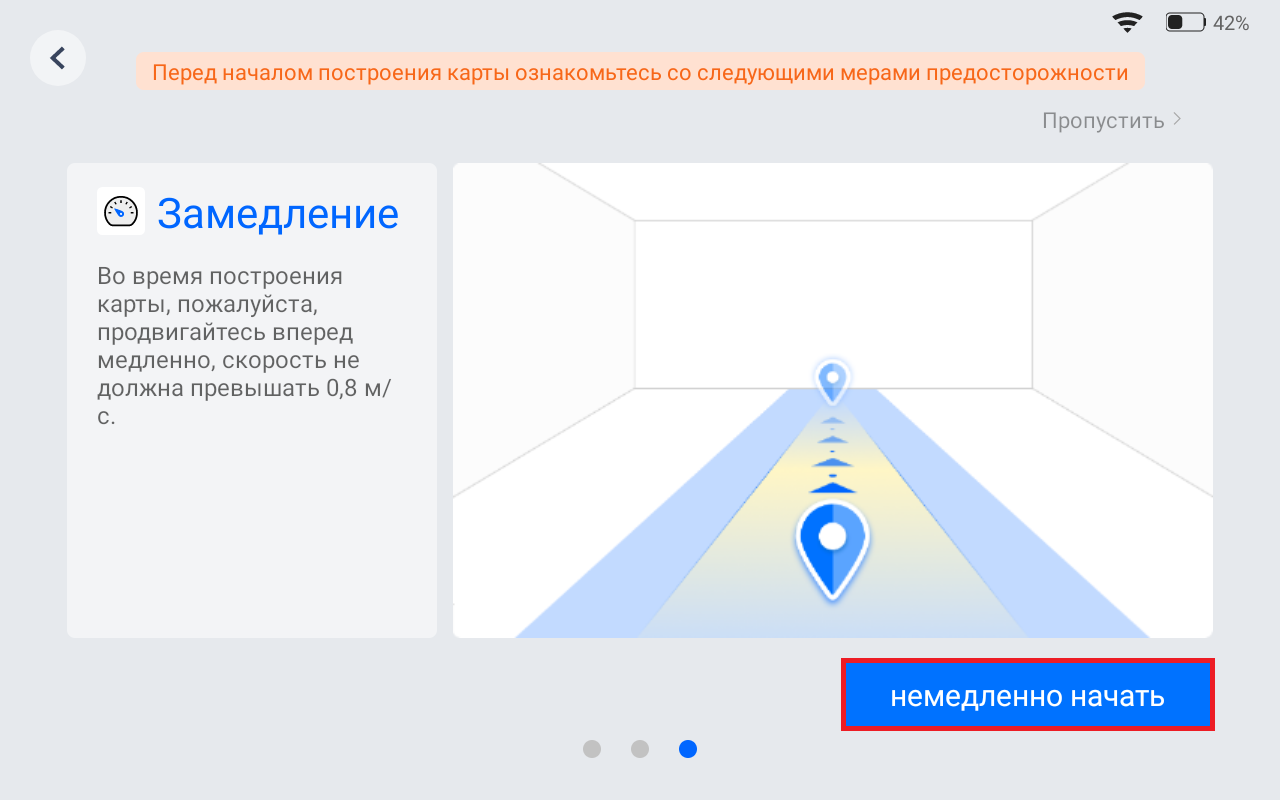 Запомните ориентацию и точку, где начиналось составление карты и медленно толкайте робота по всей территории, сканируя помещения, где робот будет задействован. Перемещайте робота медленно, если скорость высока робот предупредит используя уведомления на экране и голосовое оповещение.
Запомните ориентацию и точку, где начиналось составление карты и медленно толкайте робота по всей территории, сканируя помещения, где робот будет задействован. Перемещайте робота медленно, если скорость высока робот предупредит используя уведомления на экране и голосовое оповещение. 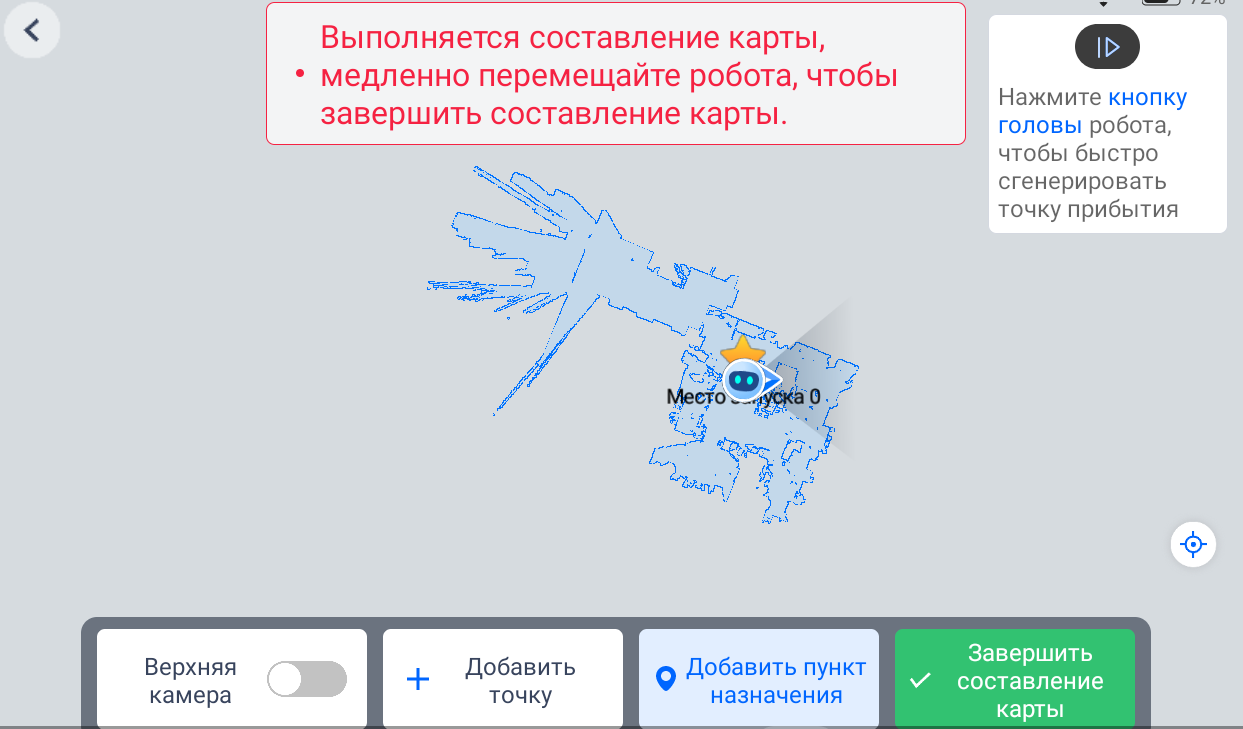
Для создания корректной карты робота нужно толкать (не тянуть), во время построения нельзя допускать пробуксовки и отрыва колес от земли. Если такое произошло, процесс создания карты нужно начинать сначала.
Во время или после сканирования территории размечайте точки назначения, пункты выдачи блюд и сбора грязной посуды, точки ожидания или приветсвия для активации соотвествующего функционала.
Ознакомьтесь с базовым пониманием разметки точек для составления корректной карты:
Пункт назначения - основная точка доставки, куда робот привозит заказы. Например: конкретный стол в зале, барная стойка.
Точка погрузки - стартовая точка и место ожидания робота. Здесь персонал загружает блюда и назначает задания. Робот автоматически возвращается сюда после завершения доставки.
Точка приветствия - место для режима сопровождения гостей. Робот ожидает посетителей, приветствует их и предлагает проводить до нужного места. Обязательна для активации соответствующего режима работы.
Точка загрузки - опорная точка для точного позиционирования на карте. Важно: изменяется только через редактор карт! Позволяет переместить точку запуска робота, отличную от точки начала построения карты.
Временная парковка - дополнительная точка ожидания для нестандартных сценариев. Можно использовать для временного размещения робота и выбирать как пункт промежуточной остановки.
Моечная - конечный пункт для сценария по сбору грязной посуды в режиме Утилизация. Робот автоматически следует сюда после завершения сценария.
Пункт сбора - зона для получения грязной посуды в режиме утилизации.
Ворота - точка интеграции с системами автоматических дверей. Требует установки дополнительного оборудования. Робот останавливается здесь для активации открытия дверей.
Важно: При создании любой точки сохраняются точные координаты и ориентация робота в пространстве. Убедитесь, что робот расположен правильно перед созданием точки. Рекомендуется создавать точки с запасом свободного пространства для маневрирования и убедиться, что робот самостоятельно способен добраться до этой точки.
Пункт назначения - столы, можно добавлять “одним нажатием” используя [Добавить пункт назначения] и сразу вводить его название; 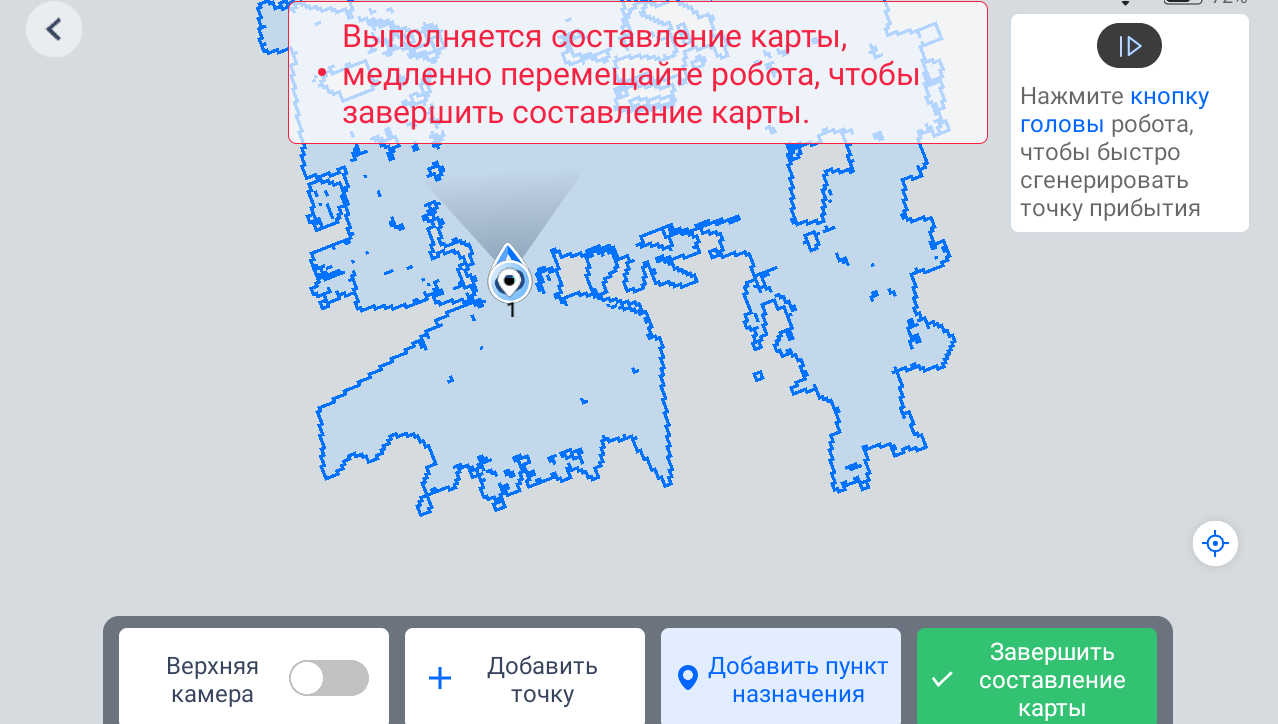 а также нажимая на кнопку со значком паузы сверху робота, около кнопки включения;
а также нажимая на кнопку со значком паузы сверху робота, около кнопки включения; 
Обязательным атрибутом для карты является Точка погрузки заказов, для ее добавления используйте инструмент [Добавить точку] и выбирая в нем соответсвующую функцию 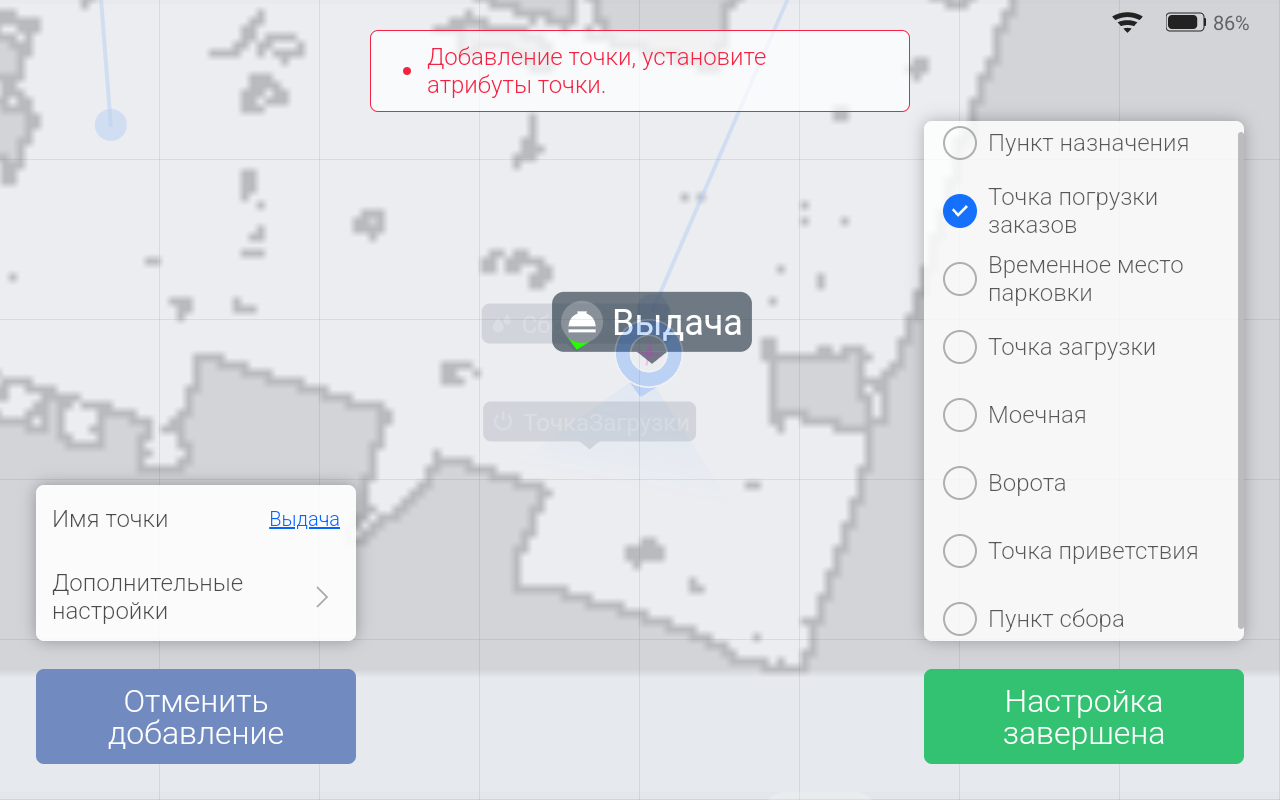
Точка сбора грязной посуды или Моечная необязательна, однако если робот должен помогать в постобслуживании стоит также добавить по аналогии с Точкой погрузки заказов, выбирая в меню добавления точки: Моечная 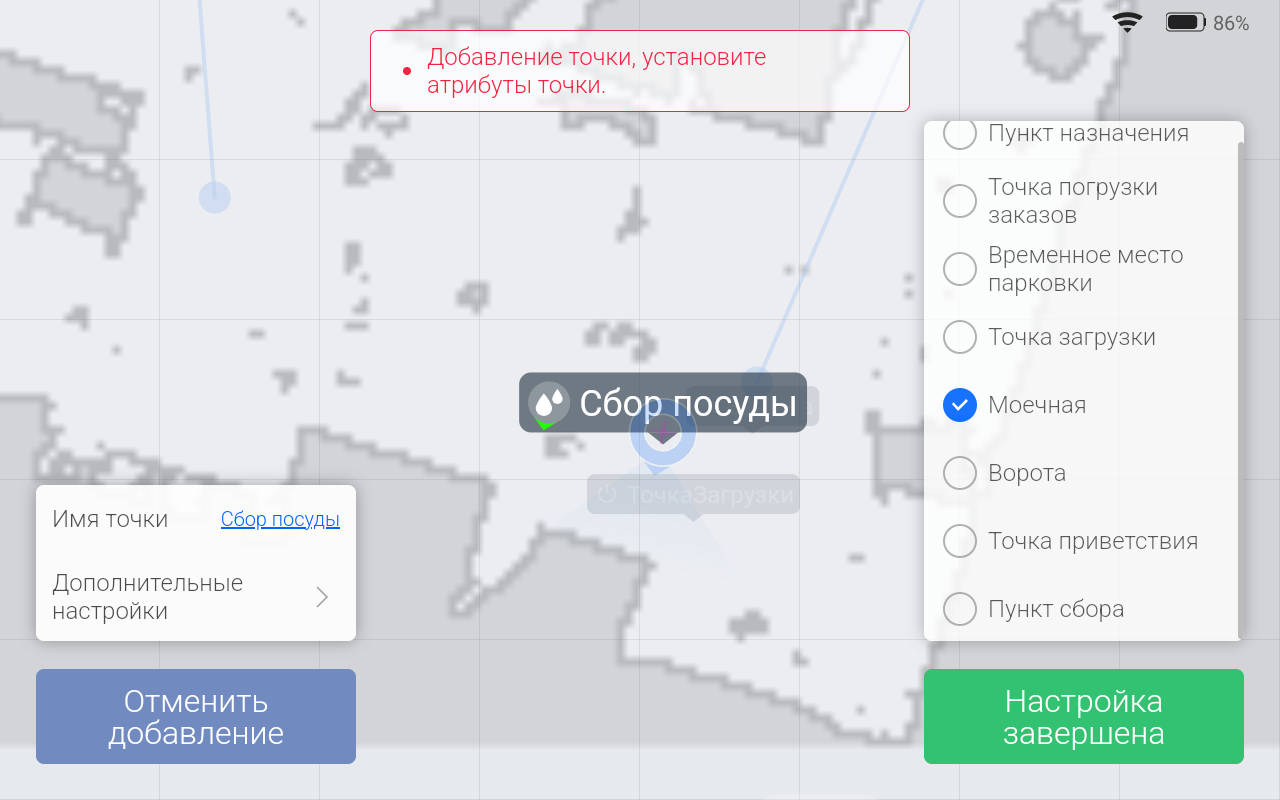 Для завершения составления карты и сохранения верните робота в позицию, где начиналось построение карты, обычно оно отмечается как Звезда с подписью Место Запуска и нажмите [Завершить составлевление карты]
Для завершения составления карты и сохранения верните робота в позицию, где начиналось построение карты, обычно оно отмечается как Звезда с подписью Место Запуска и нажмите [Завершить составлевление карты] 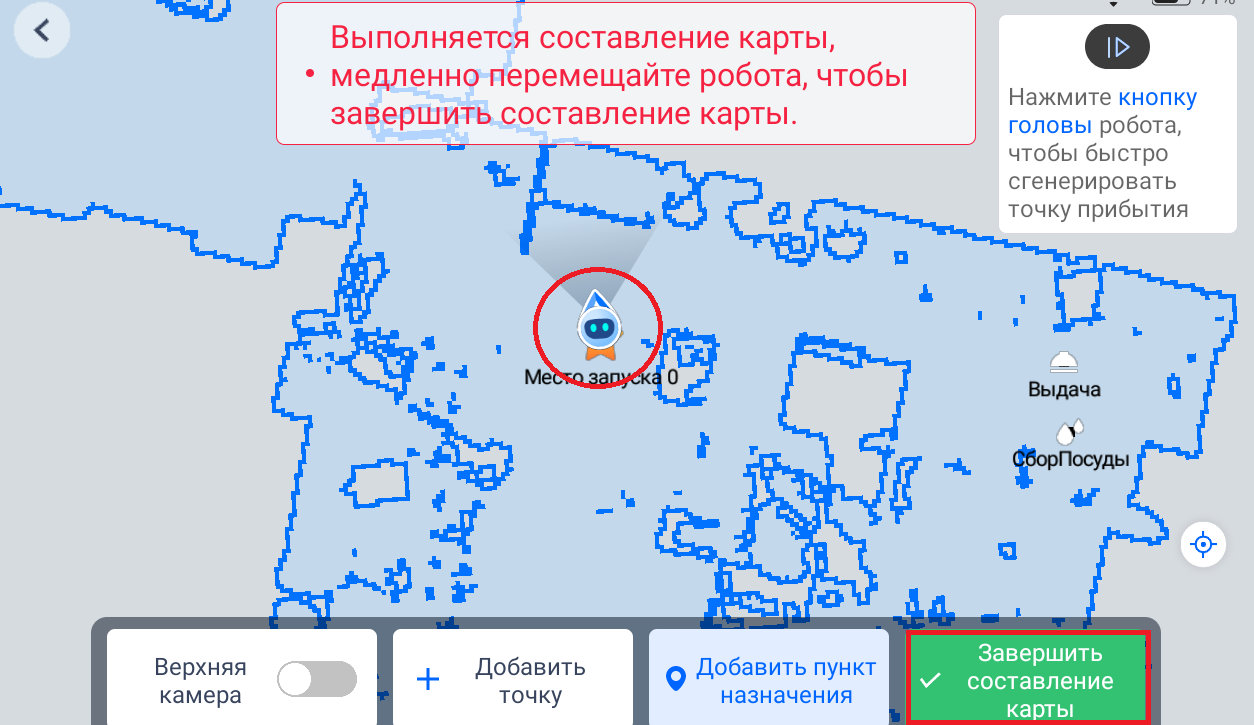 Дождитесь сохранения карты локально на роботе, и не забудьте загрузить карту в облако PUDU
Дождитесь сохранения карты локально на роботе, и не забудьте загрузить карту в облако PUDU 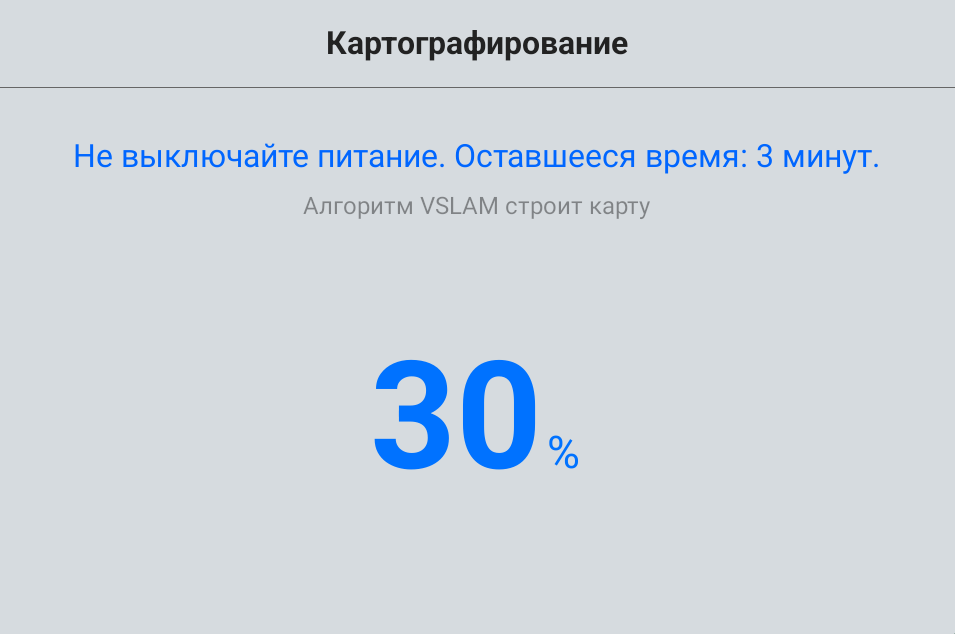
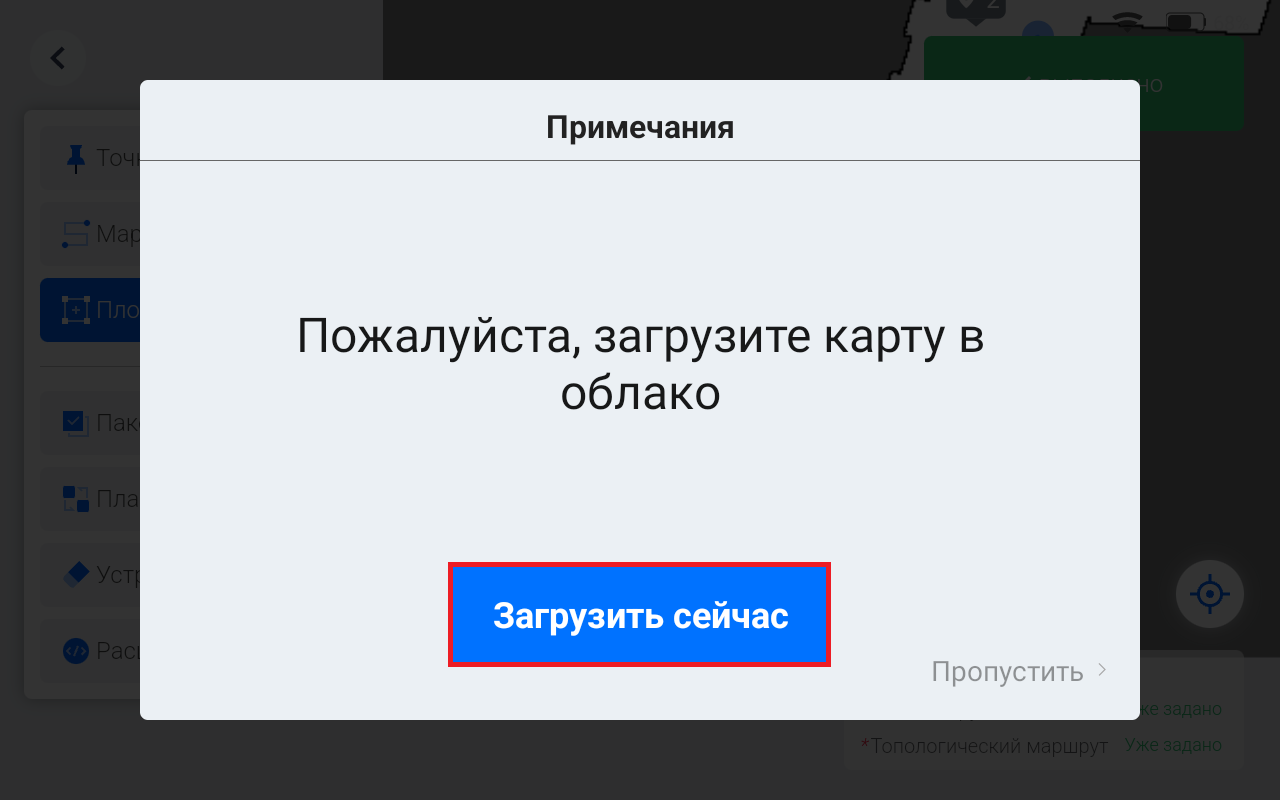
Если карту не удается загрузить в облако попробуйте использовать другую сеть WiFi, а так же убедитесь, что эта сеть имеет доступ к Интернету.
После загрузки пользователя возвращает в меню выбора карт, где в списке появится новая карта - ее можно отредактировать и расширить 
Шаг 4. Разметка и улучшение карты.
При использовании методов Laser, VSLAM + Laser, Гибридный на карте появляются артефакты сканирования, для очистки перейдите в инструмент [Устранить помехи] 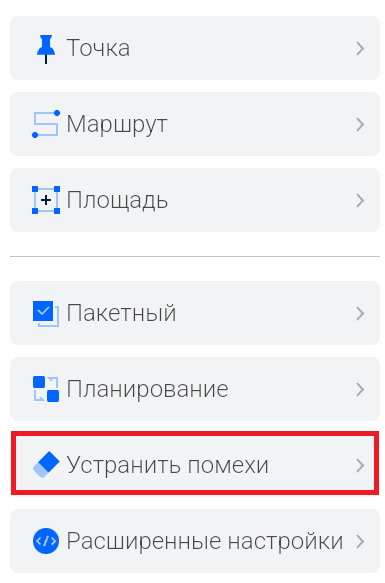 Следуйте инструкции на роботе, чтобы удалить ошибочно отсканированные препятствия
Следуйте инструкции на роботе, чтобы удалить ошибочно отсканированные препятствия 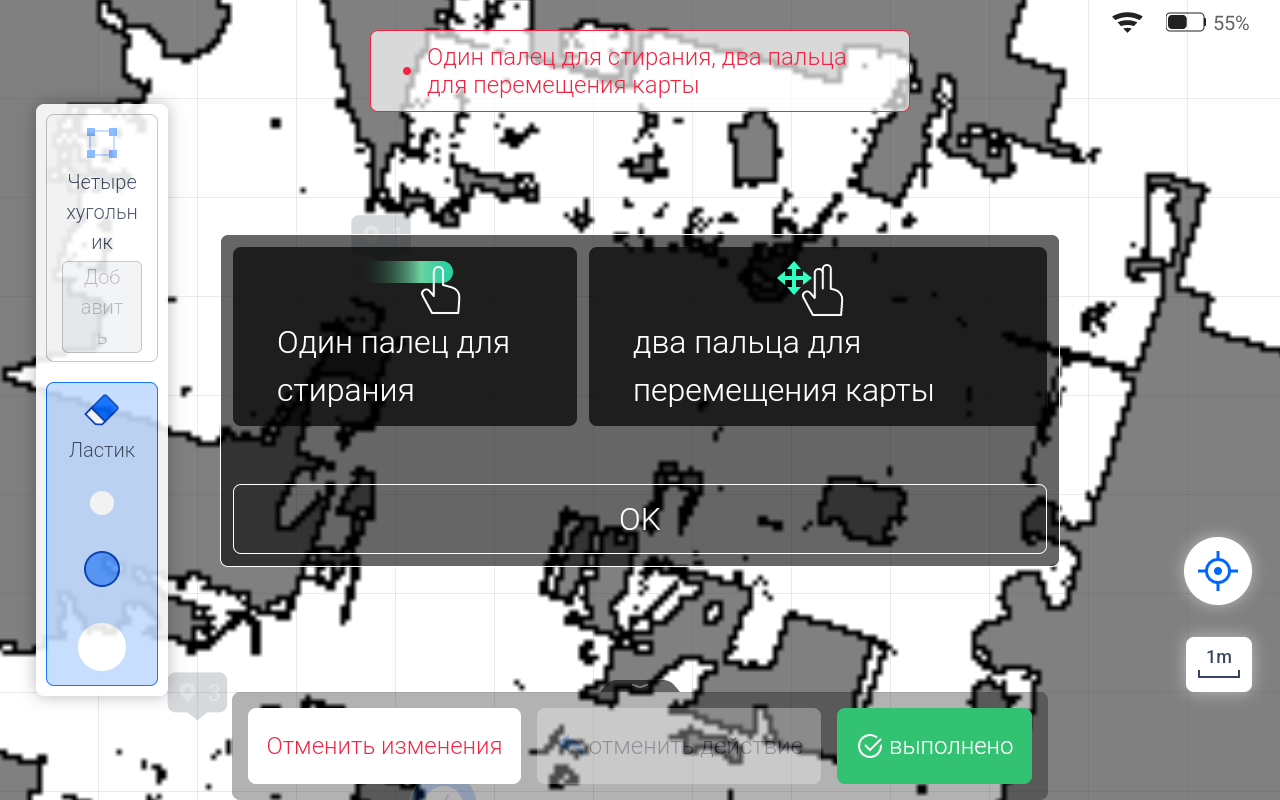 Нажмите [Выполнено], чтобы сохранить изменения или [Отменить изменения], например если было удалено лишнее.
Нажмите [Выполнено], чтобы сохранить изменения или [Отменить изменения], например если было удалено лишнее.
Для безопасности робот должен обходить участки с риском падения или столкновения: лестницы, лифты, подъемники, мебель с выступающими углами или краями. Такие места необходимо отметить на карте.
Используйте иструмент [Площади] на панели редактирования, чтобы нарисовать виртуальные стены, зоны с риском падения, особые зоны ограничения RGBD, а так же установите ограничения скорости там, где это необходимо 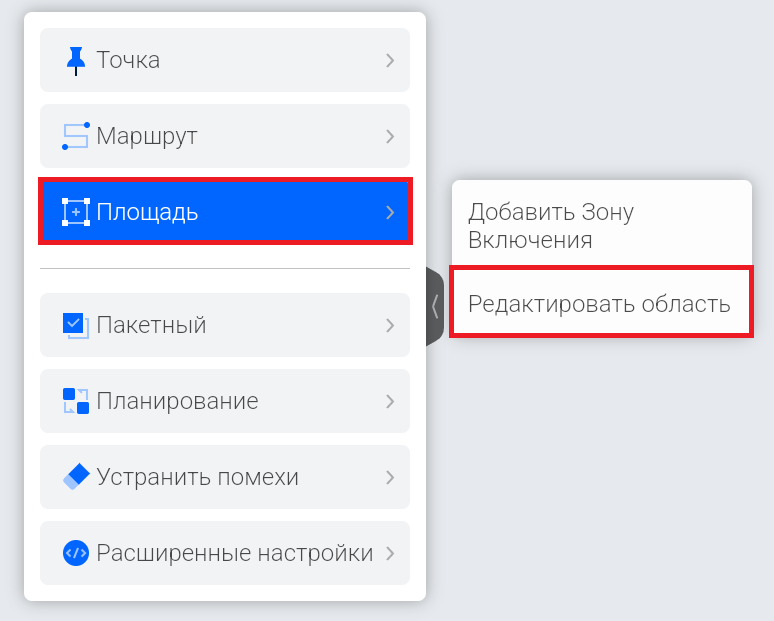 Нажмите [Добавить область] и выберите следующий тип особых зон
Нажмите [Добавить область] и выберите следующий тип особых зон 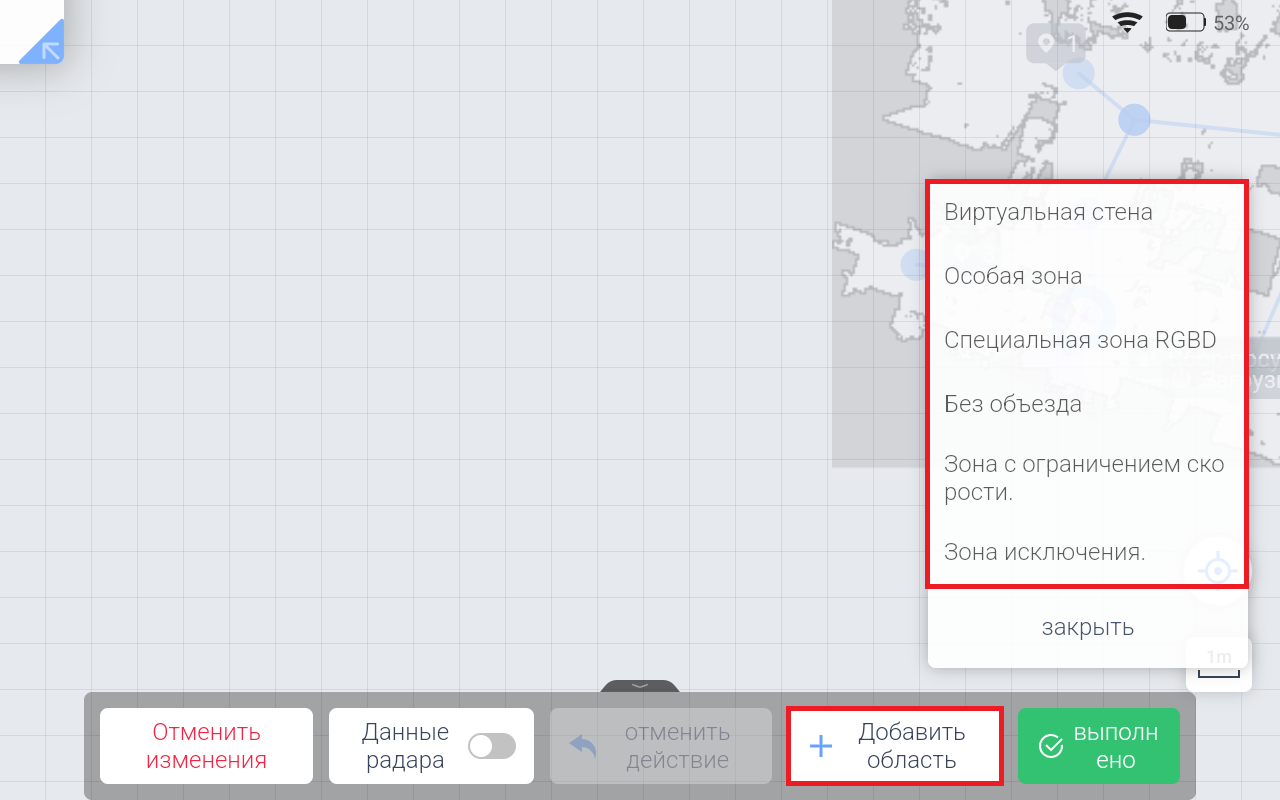 Виртуальная стена - на карте отмечается отрезок, который роботом будет воспринят как физическая стена, робот не будет пересекать эту линию.
Виртуальная стена - на карте отмечается отрезок, который роботом будет воспринят как физическая стена, робот не будет пересекать эту линию.
Особая зона - зона с измененным алгоритмом определения препятствий. Такой зоной следует отмечать места около лестниц и элеваторов, столешницы с большим вылетом и пороги.
Специальная зона RGBD - специализированная особая зона, в которой робот не будет реагировать на препятсвия с помощью RGBD камер спереди и сбоку, а полагаться только на LiDAR.
Без объезда - область на карте, определяющая поведение робота, в случае возникновения препятсвия при движении от точки к точке по топологическому маршруту робот будет сам ожидать, пока путь не освободится и не будет пытаться перестроить путь для объезда препятсвия на пути.
Зона с ограничением скорости - это область, при въезде в которую робот автоматически снижает свою скорость до заданного значения.
Зона исключения - это область в виде замкнутой фигуры из виртуальных стен, которая исключает въезд по периметру.
Смена точки старта
По умолчанию точка начала составления карты и ориентация на этой точке являются Точкой загрузки, если необходимо перенести точку запуска, то необходимо отредактировать уже сохраненную карту. Перейдите в меню выбора карт нажав редактировать карт 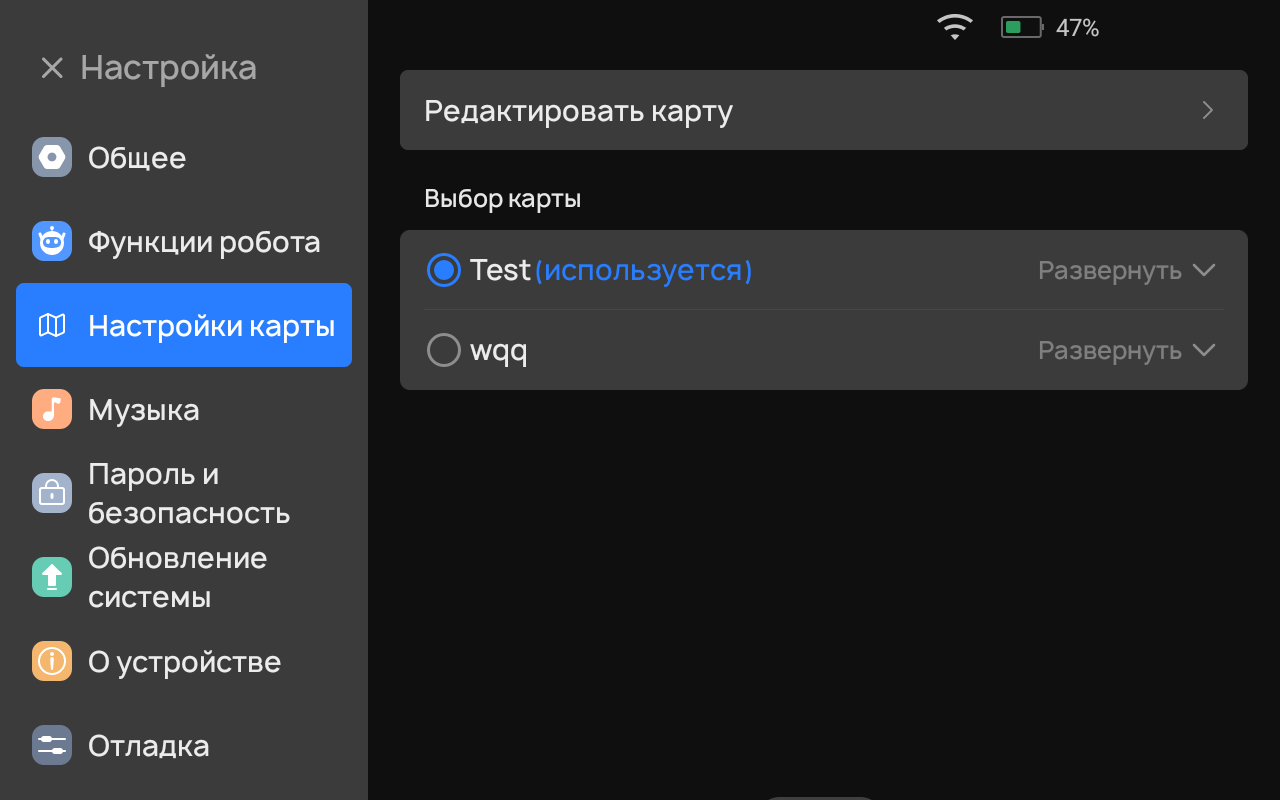 Нажмите на зеленый значек чтобы перейти к редактированию. Если робот попросит обновить локализацию, для этого необходимо поставить его в место где составление карты начиналось и нажать [Обновить положение]
Нажмите на зеленый значек чтобы перейти к редактированию. Если робот попросит обновить локализацию, для этого необходимо поставить его в место где составление карты начиналось и нажать [Обновить положение] 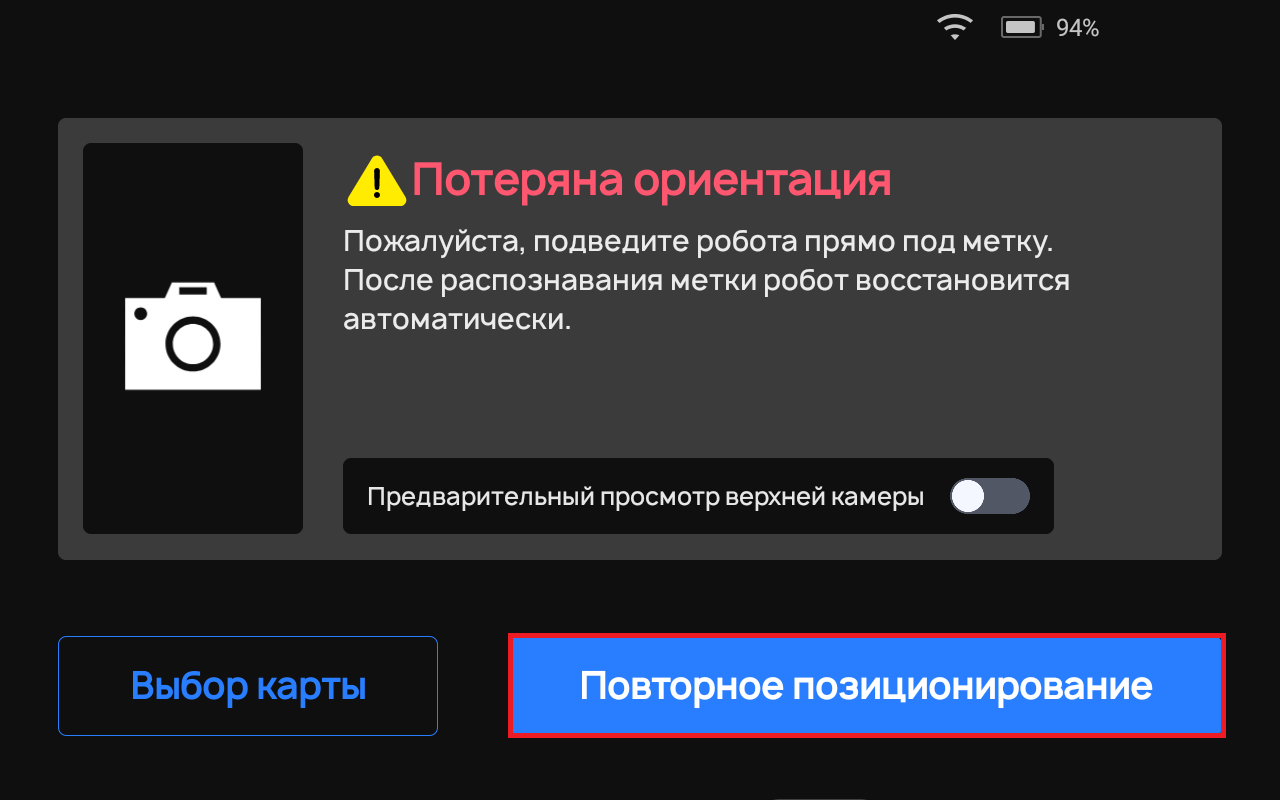 Перейдите в меню [Точки] для создания новой точки запуска
Перейдите в меню [Точки] для создания новой точки запуска 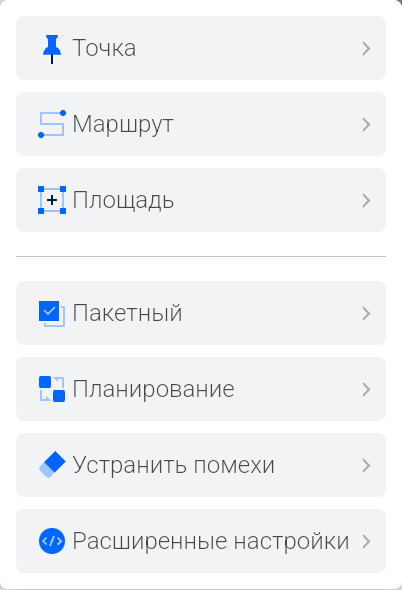 Установите робота в новую позицию запуска и нажмите [Добавить новую точку] ![картинка с инструментом]{:.image style=”display: block; margin: 20px auto”} Справа выберите тип точки Точка загрузки и для сохранения [Выполнено] ![Картинка с точкой загрузки стрекой на выполнено]{:.image style=”display: block; margin: 20px auto”} Завершите редактирование и незабудьте загрузить карту в облако PUDU
Установите робота в новую позицию запуска и нажмите [Добавить новую точку] ![картинка с инструментом]{:.image style=”display: block; margin: 20px auto”} Справа выберите тип точки Точка загрузки и для сохранения [Выполнено] ![Картинка с точкой загрузки стрекой на выполнено]{:.image style=”display: block; margin: 20px auto”} Завершите редактирование и незабудьте загрузить карту в облако PUDU
Системные настройки
В данном разделе содержатся руководства по системным настройкам для повышения удобства использования роботов PUDU
Установка раскладки
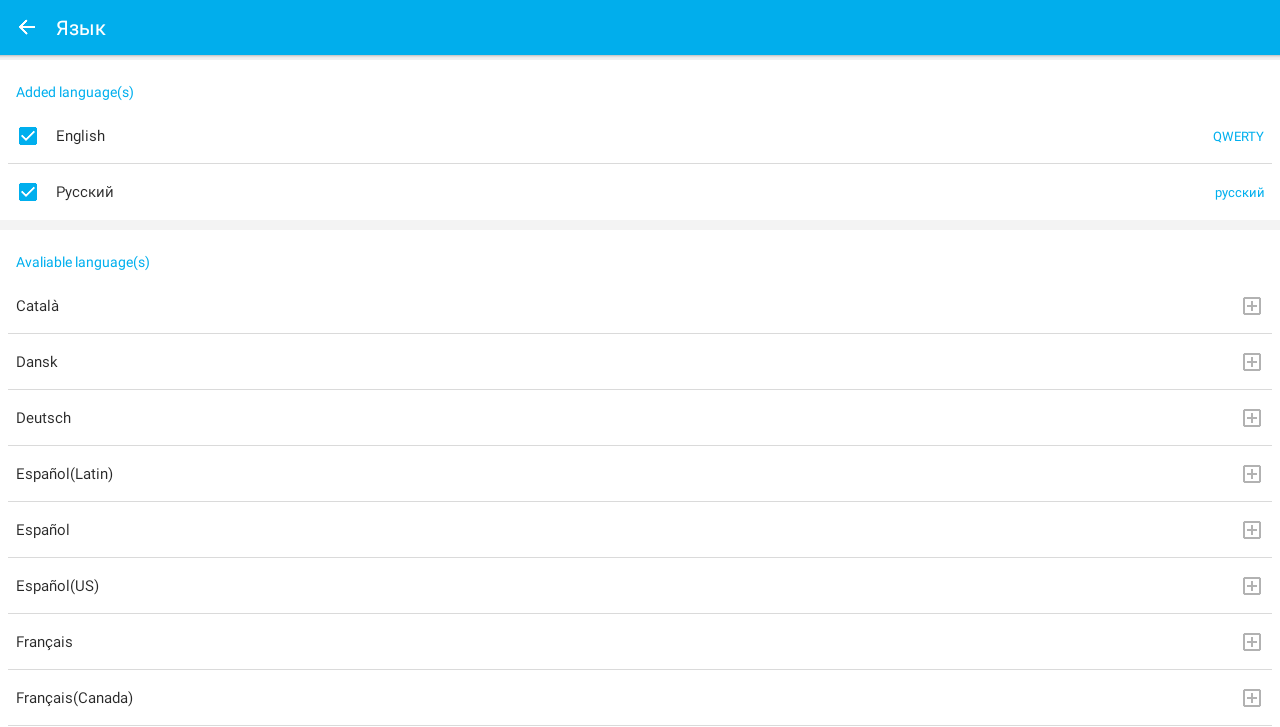
Системный язык интерфейсов выбирается пользователем при первом запуске и активации робота, а языки ввода клавиатуры пользователю необходимо настроить самостоятельно. Для установки кириллицы или любой другой раскладки требуется добавить необходимые поддерживаемые языки в активные раскладки клавиатуры следуя руководству:
- При вызове ввода с экранной клавиатуры нажмите блок меню языков
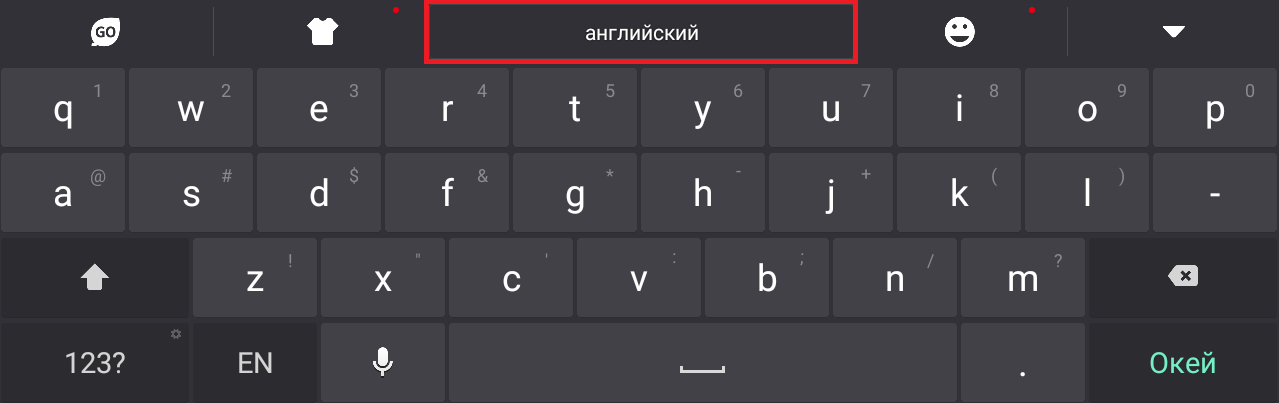
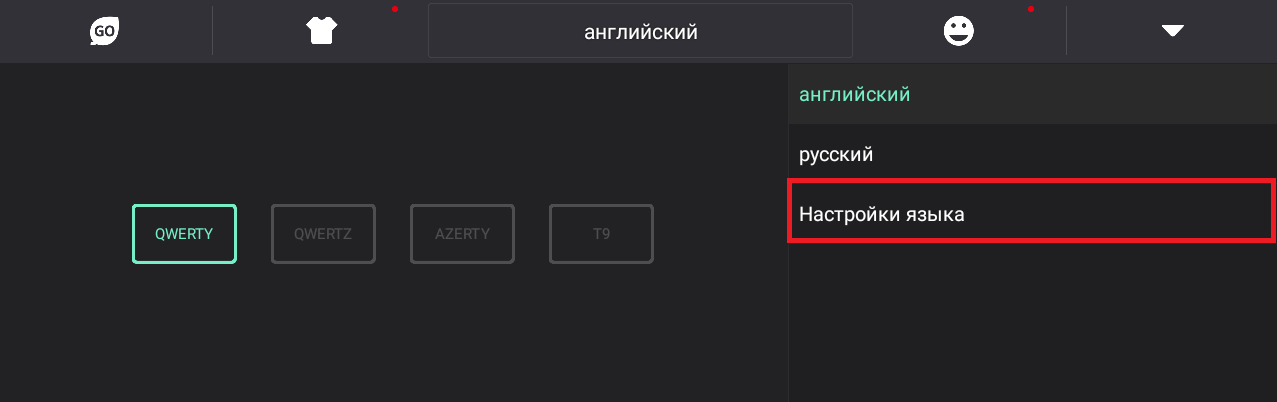
- Перейдите в [Настройки языка]
- Удалите неиспользуемые языки, нажав слева на чекбокс около соответствующего языка, а затем нажав на иконку Корзины справа
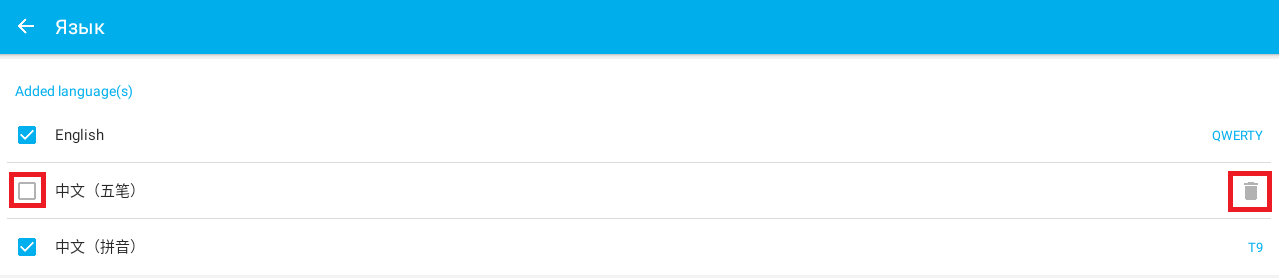
- Выберите нужный язык нажав на иконку Плюс в правой части экрана
Установка часового пояса
Правильное системное время необходимо роботу-официанту для корректной работы по спланированному расписанию. По умолчанию у робота время и часовой пояс синхронизируются по сети, а изначальная локация передается при привязке робота с указанием локации, где робот планируется к использованию.
Установить часовой пояс можно через основное приложение:
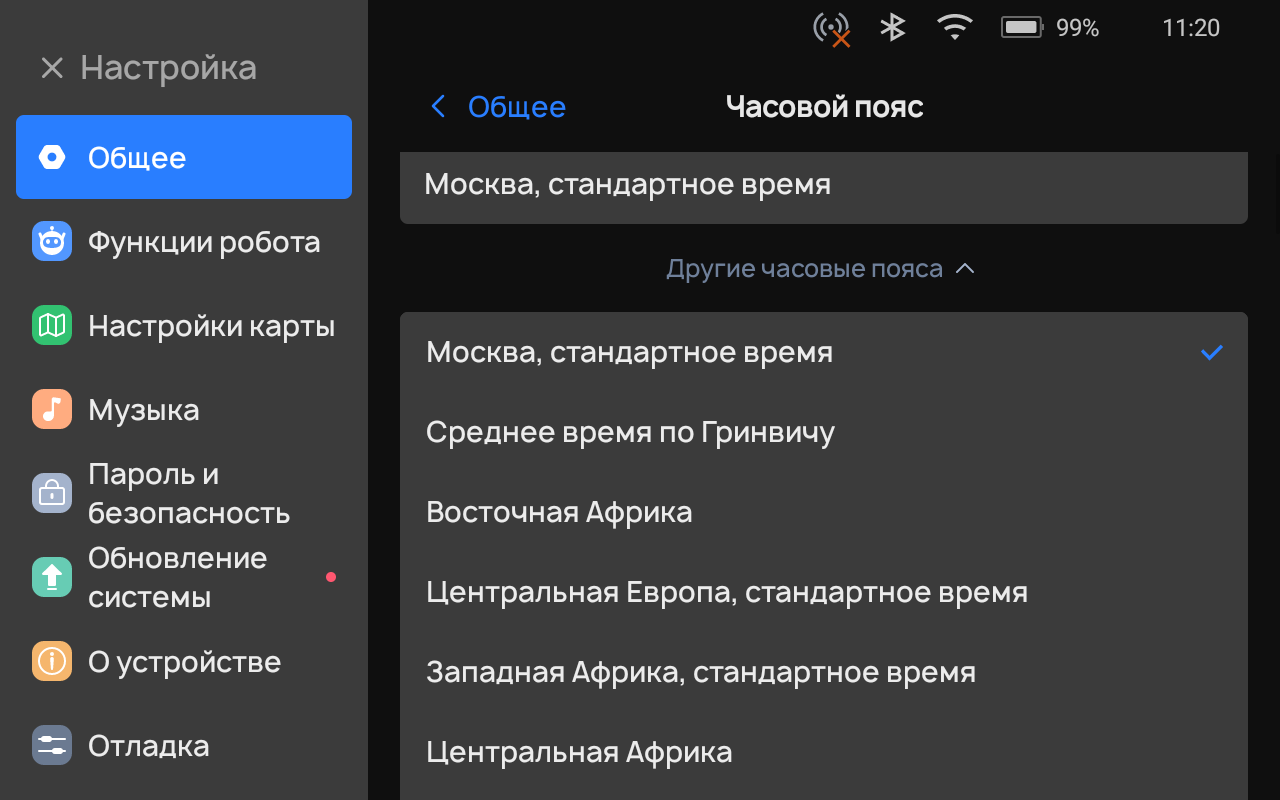
- Перейдите в [Настройки] из Главного меню приложения
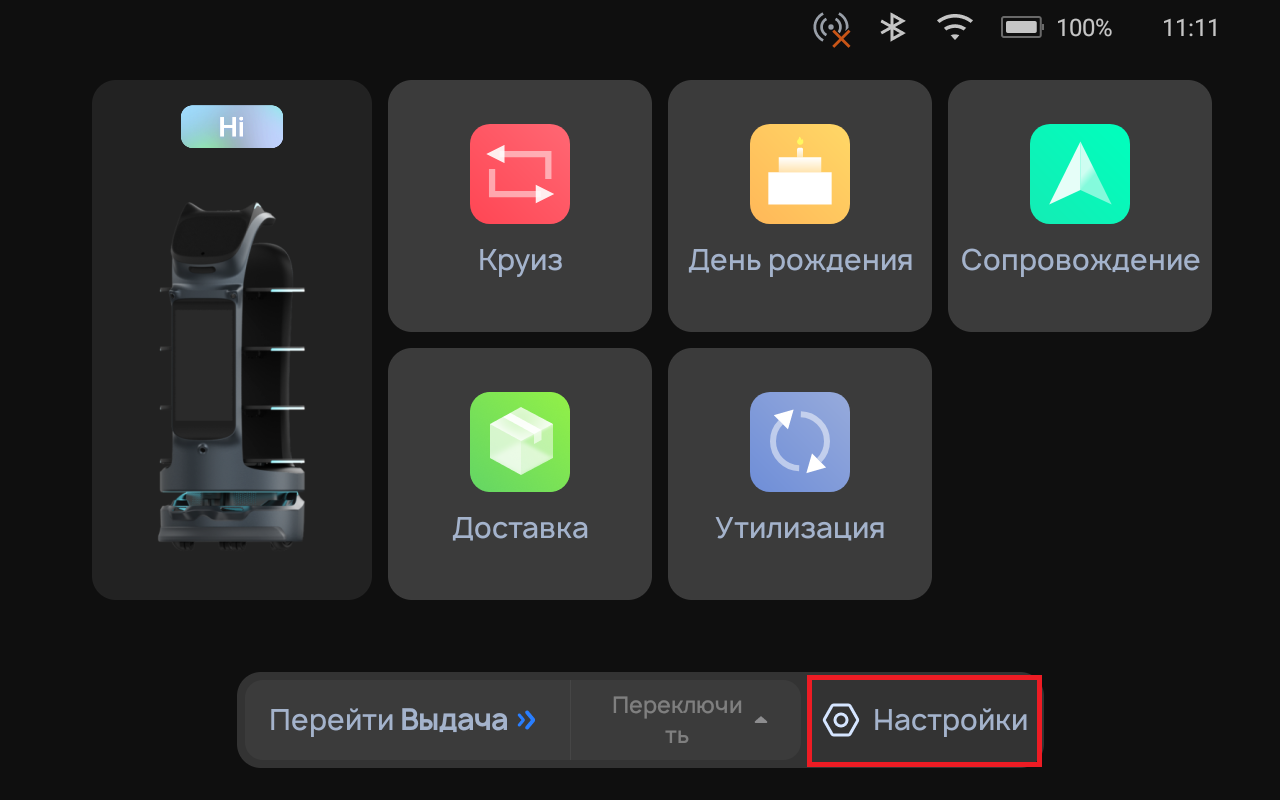
- В разделе [Общее] установите верный часовой пояс
Установить часовой пояс можно через системные настройки
- Перейдите в настройки из Главного меню приложения
- В меню навигации по разделам найти раздел - [Отладка]
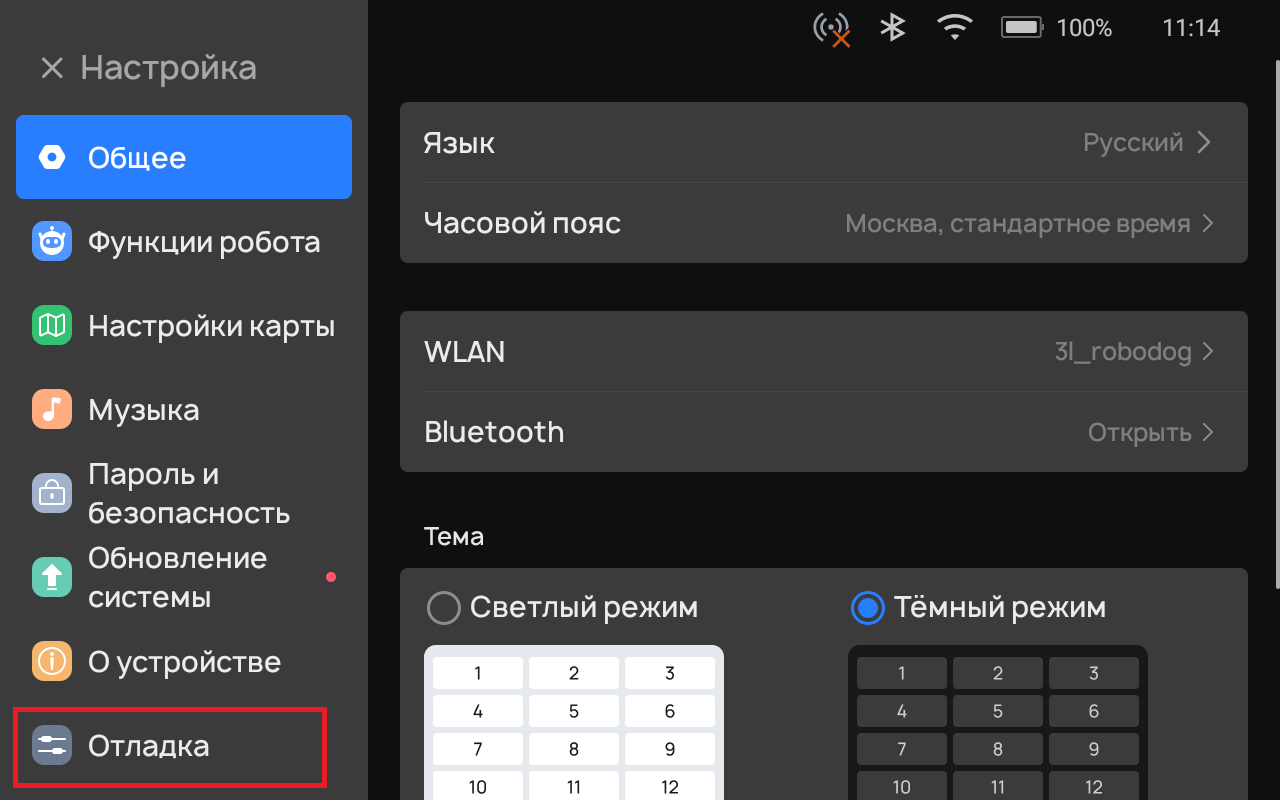 Перейти к отладке
Перейти к отладке 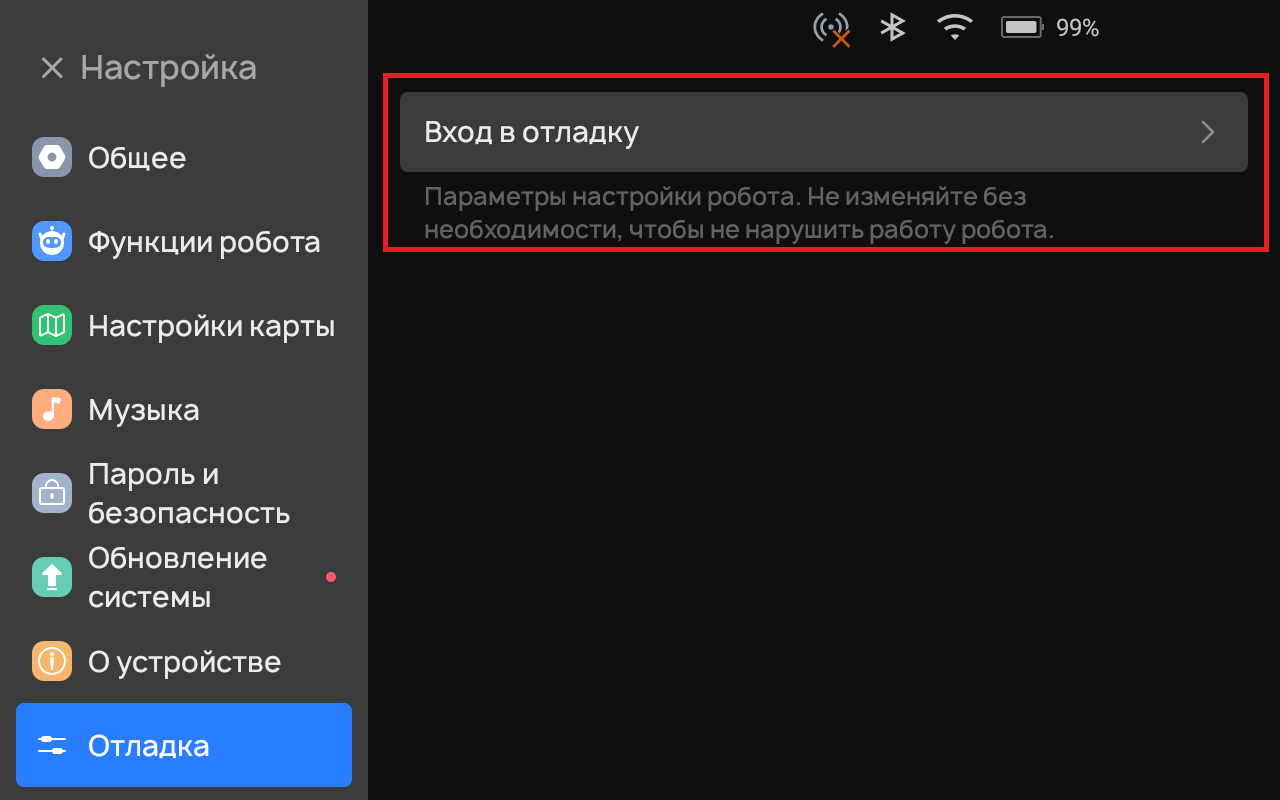 Пароль ко всем системным функциям и прерываниям pudupw
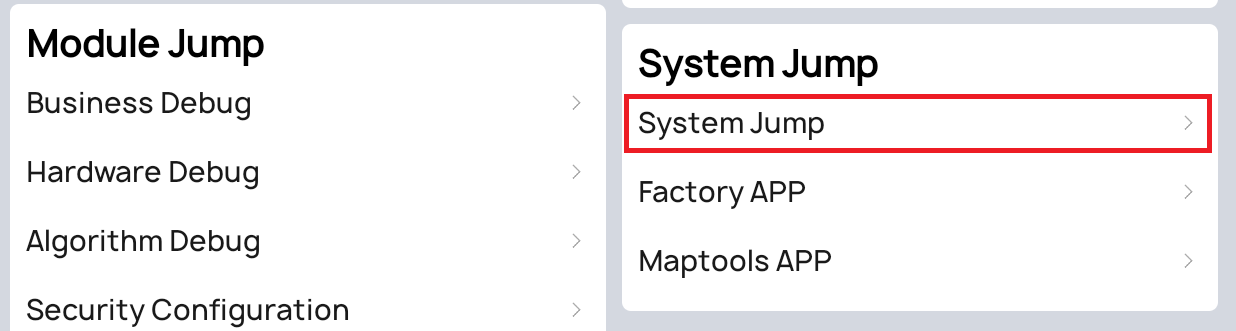
Пароль ко всем системным функциям и прерываниям pudupw - В разделе System Jump перейти в пункт [System Jump]
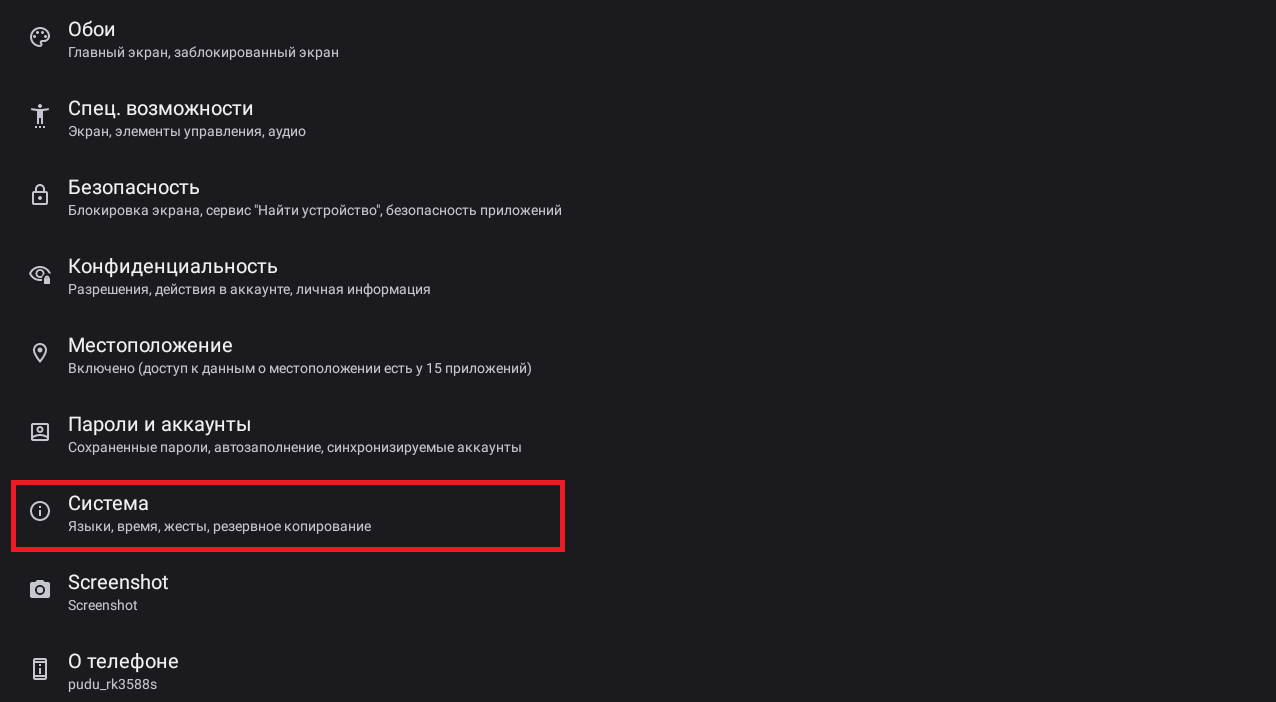
- Перейти в раздел [Система]
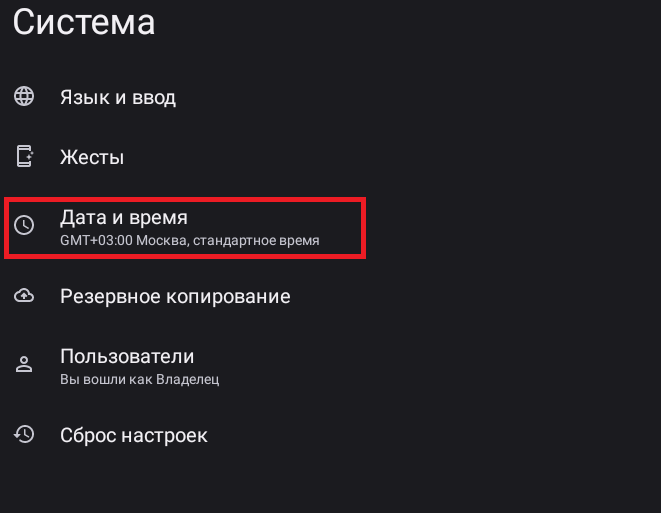
- В подразделе [Дата и Время] установить корректный часовой пояс
Удаленное управление и мониторинг
Для отслеживания и постановки задач для роботов удаленно через фирменное приложение для мобильного устройства или бизнес платформу необходимо следовать руководству:\
- Перейдите в [Настройки] из Главного меню приложения
- В меню навигации по разделам найти раздел - [Функции робота]
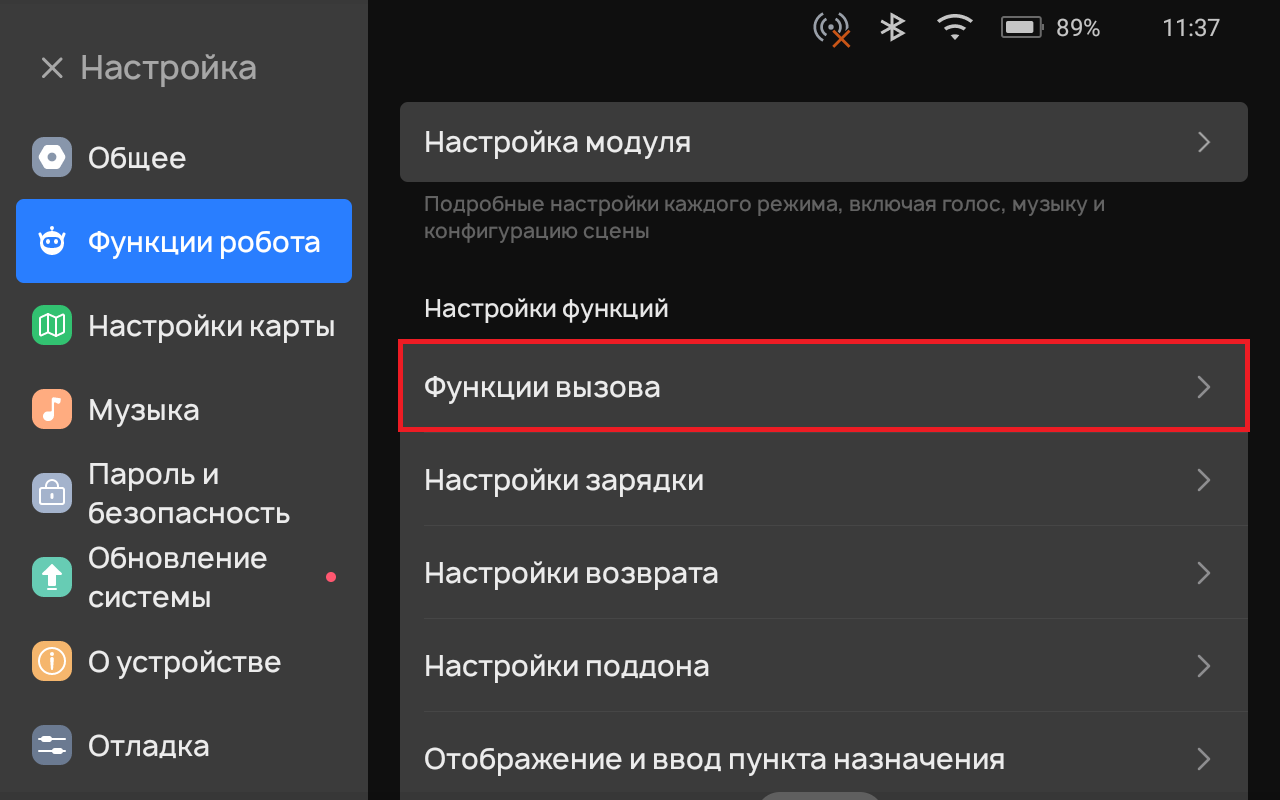
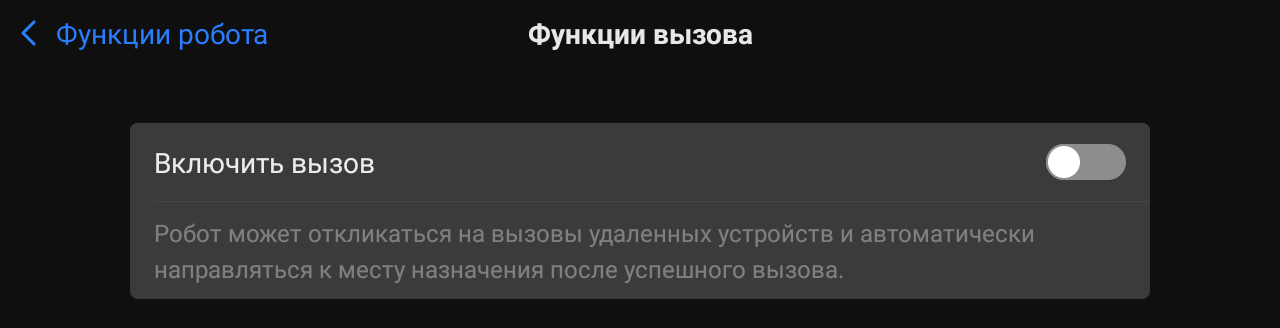
- Внутри раздела так же перейти в [Функции вызова], где будет одна неактивная функция, которая отвечает за возможность принимать задания с облака PUDU. Переключите ее в Активное состояние
- Включив основную фунцию вызова также необходимо включить функцию ниже, открывающую доступ к мониторингу с облака PUDU и связь через мобильное приложение PUDULink
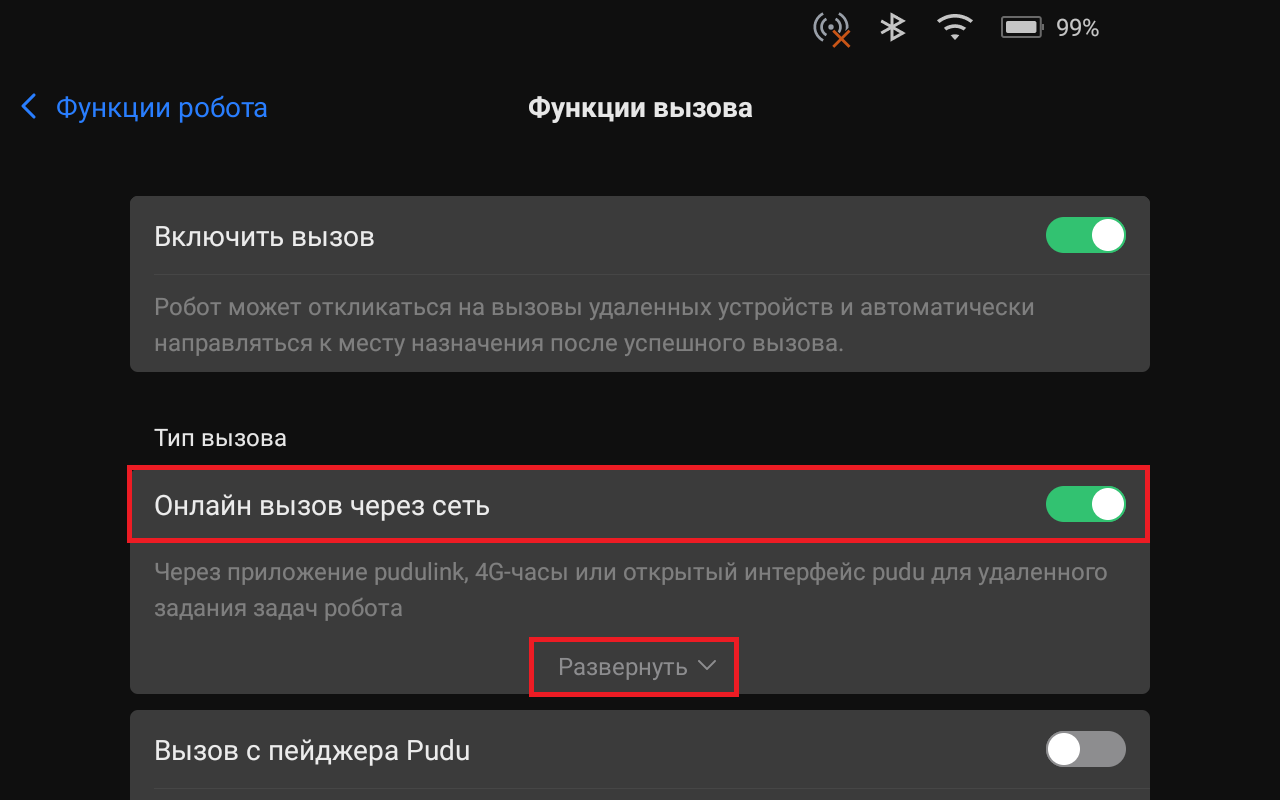
Для скачивания приложения отсканируйте QR-код c экрана робота, Развернув настройку [Онлайн вызов через сеть] или с картинки ниже 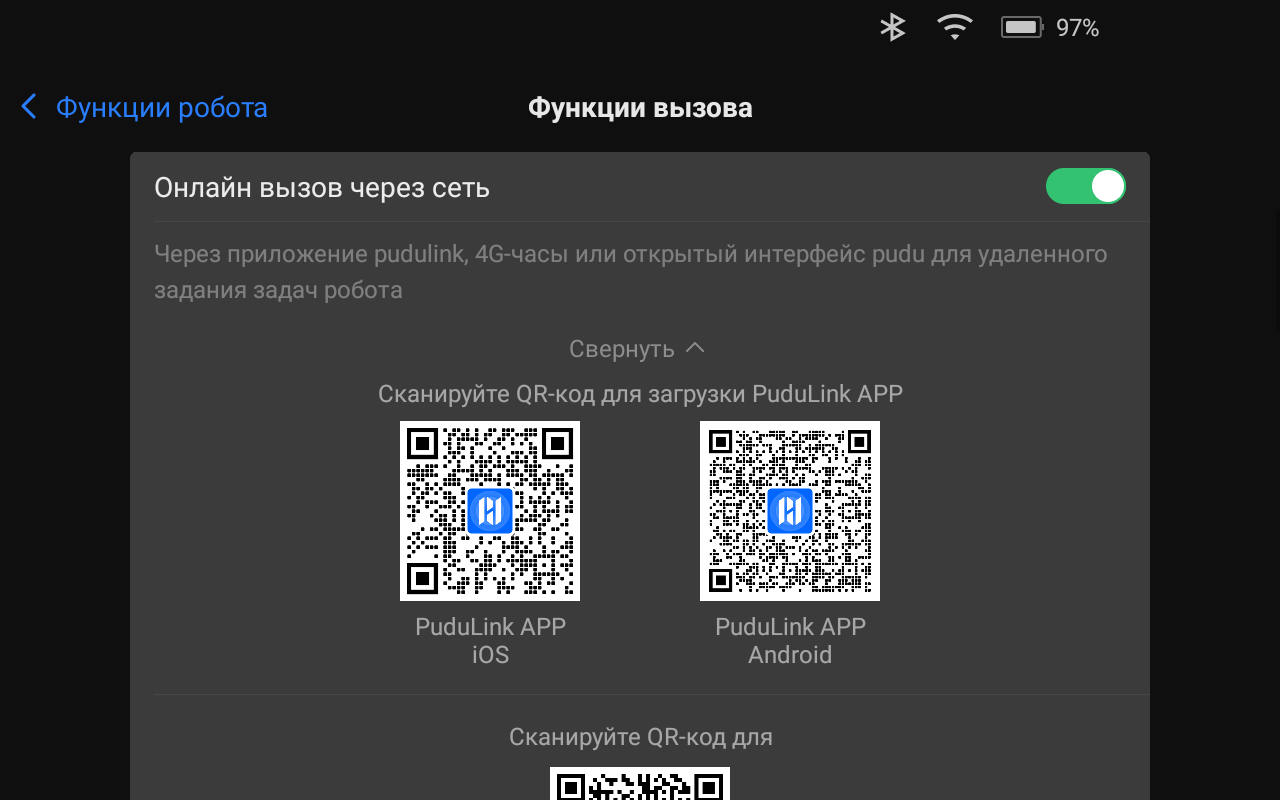 Логином и паролем являются данные для входа на бизнес платформу.
Логином и паролем являются данные для входа на бизнес платформу.
Безопасность
Для ограничения взаимодействия посторонних людей при работе робота в общественных местах на операционном экране предусмотрена возможность установить пароль блокировки на необходимую степень, чтобы не испортить опыт использования робота посетителем. Следуйте руководству:
1.Перейдите в [Настройки] из Главного меню приложения
- В меню навигации по разделам найти раздел - [Пароль и безопасность]
- Переключите блокировку экрана на необходимые функции
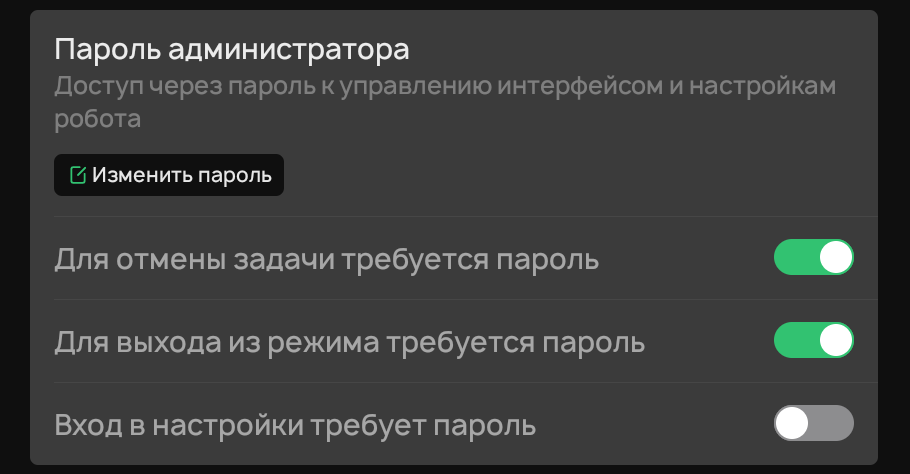 По умолчанию пароль 0000, для изменения нажмите [Изменить пароль] в данном блоке настроек.
По умолчанию пароль 0000, для изменения нажмите [Изменить пароль] в данном блоке настроек.
Настройка взаимодействия посетителей с роботом
Настройками взаимодействия можно гибко настроить робота под свою модель включения робота в рабочую зону Перейдите из меню навигации по разделам в раздел - [Функции робота], внутри раздела найдите группу настроек Настройки взаимодействия 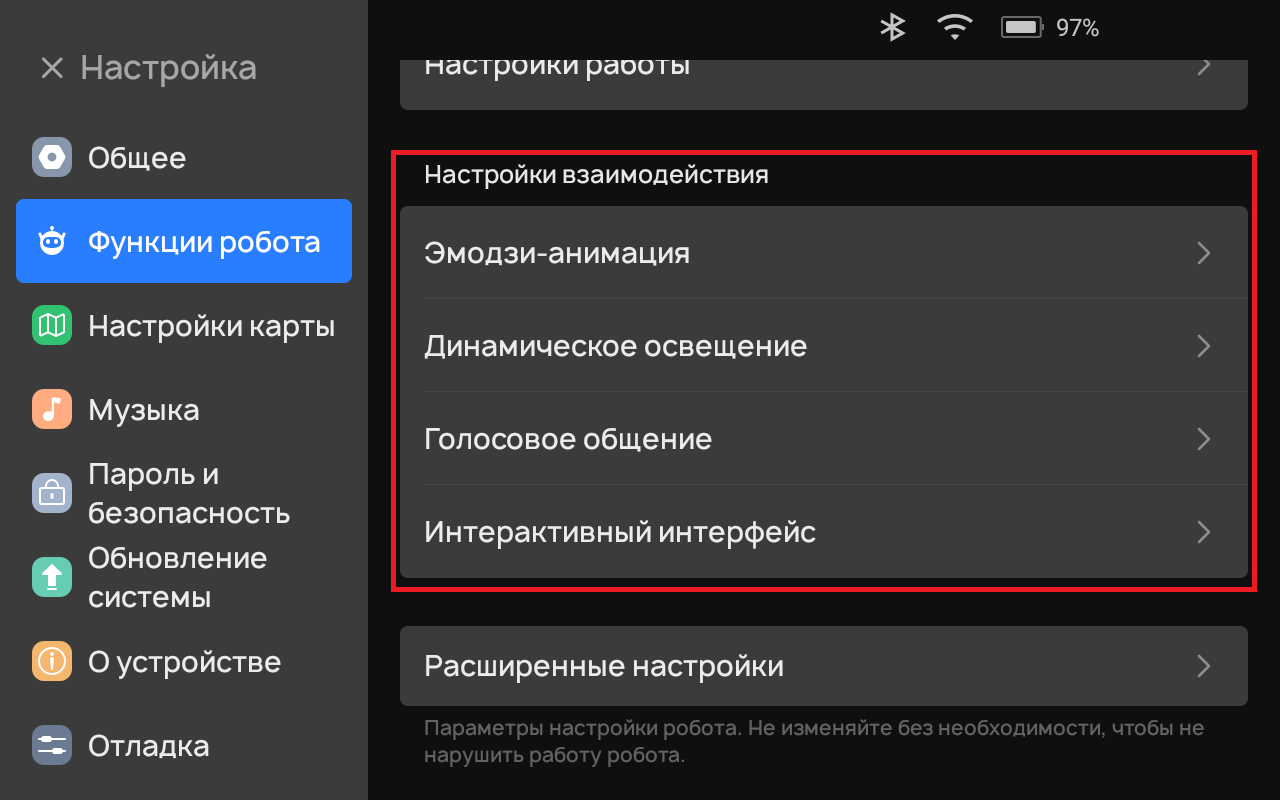
В меню настроек [Эмодзи-анимация] изменяется:
- Настройки показа эмоции на операционном экране во время доставки заказов
- Выбирается отображаемое эмодзи
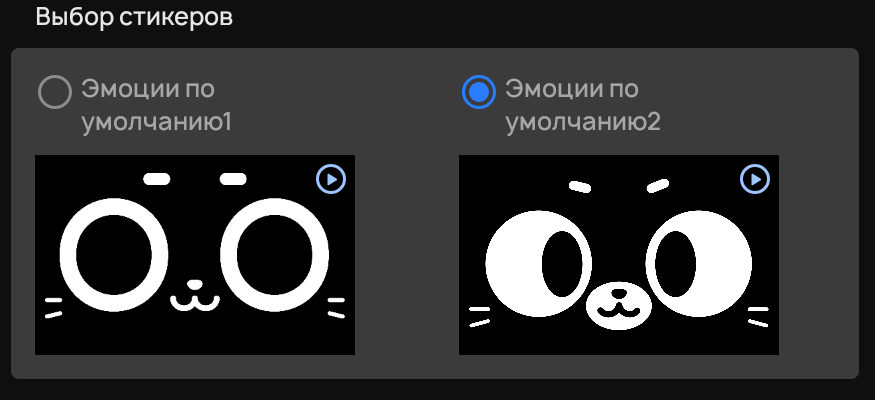
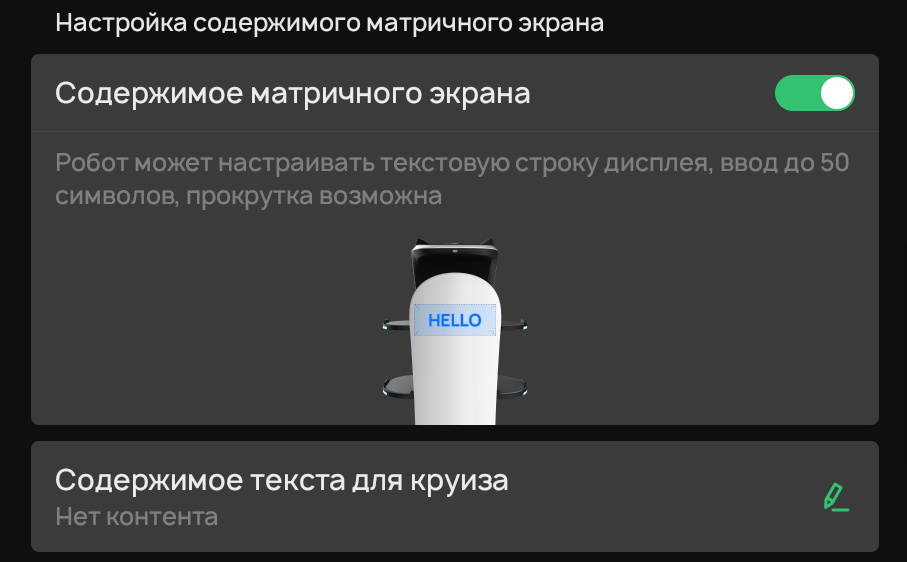
- Выполняется управление контентом “бегущей строкой” на спине робота
В меню настроек [Динамическое освещение] конфигурируется предупреждающая световая проекция спереди робота и подсветка подносов робота доставщика глобально и для специальных режимов доставки, таких как - специальная доставка в День рождения 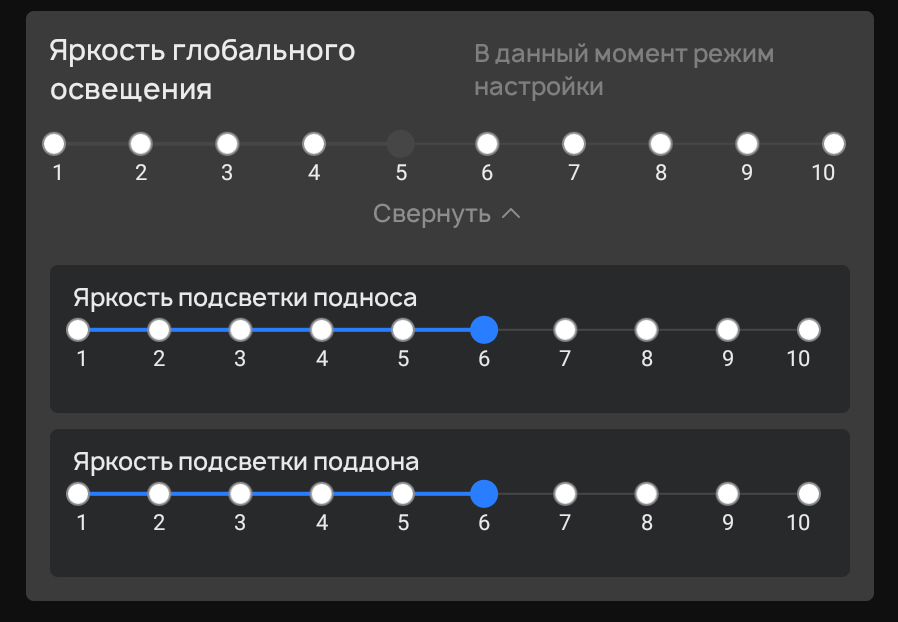
Яркость подсветки поддона - регулирует освещение на поднос робота;
Яркость подсветки подноса - регулирует яркость световых полос по бокам подносов;
В меню настроек [Голосовое общение] выбирается диктор синтезированного пакета голосов
В меню настроек [Интерактивный интерфейс] можно включить/отключить реакцию робота на касание ушей, спинки, и при детекции человека перед собой. 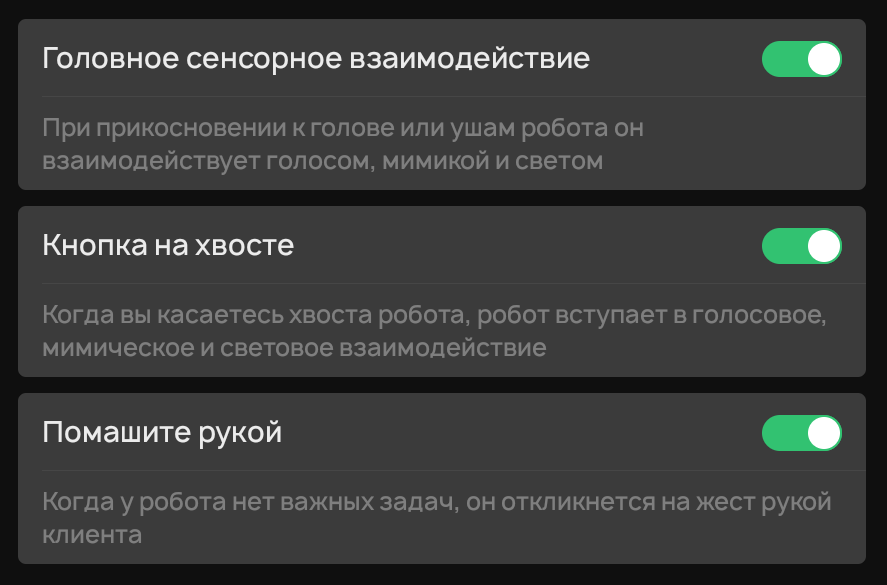
Шаг 5. Обзор режимов и их настройка
Переход в соотвествующий режим выполняется из Главного меню приложения, каждый режим имеет персональные настройки. 
Для удобства на Главном меню приложения неиспользуемые режимы можно скрыть
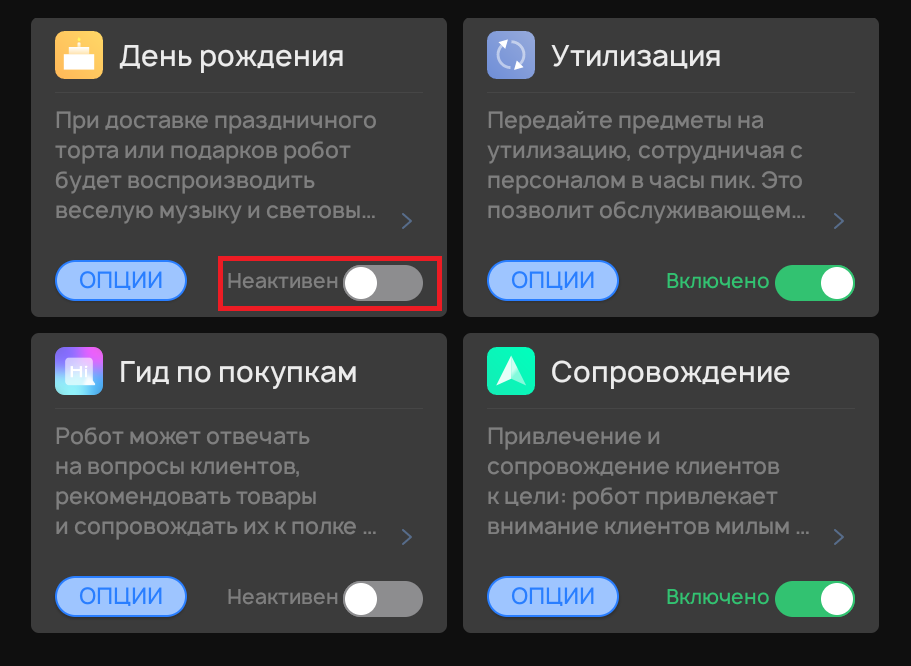
- Перейдите в [Настройки] из Главного меню приложения
- В меню навигации по разделам найти раздел - [Функции робота] и перейти в [Настройку модулей]
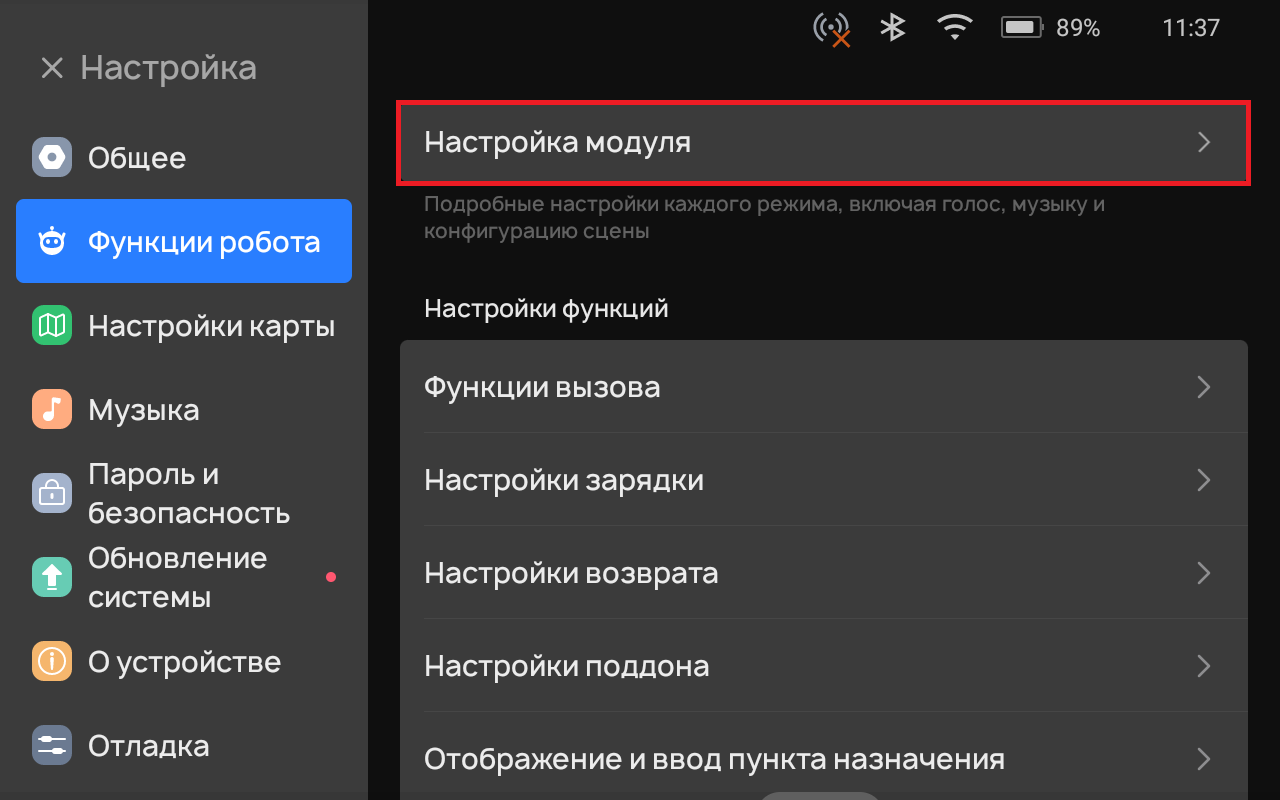
- Выключите/Включите необходимые режимы переключив ползунок в плитке с соотвествующим режимом в состояние [Неактивен]
Круиз и маршруты движения
Круиз - это режим для задания цикличного движения по точкам доставки или узлам топологического маршрута в заданной последовательности. Робот может развозить напитки, закуски или десерты для самообслуживания (необходимо добавить пользовательские голосовые оповещения во время режима круиза), а также вещать рекламный материал. Для вызова режима круиза необходимо создать маршрут круиза, для этого следуйте следующим шагам:
Круиз по точкам топологического маршрута:
- В меню редактирования карты выбрать инструмент [Маршрут] - [Добавить маршрут круиза]
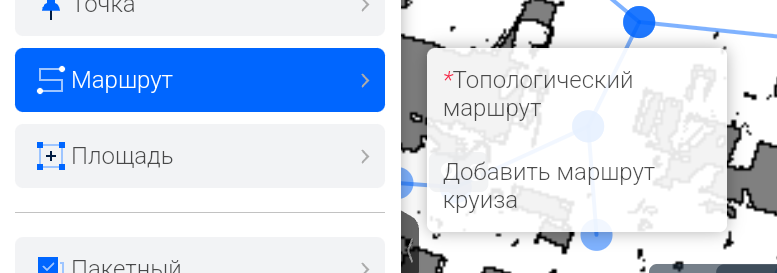
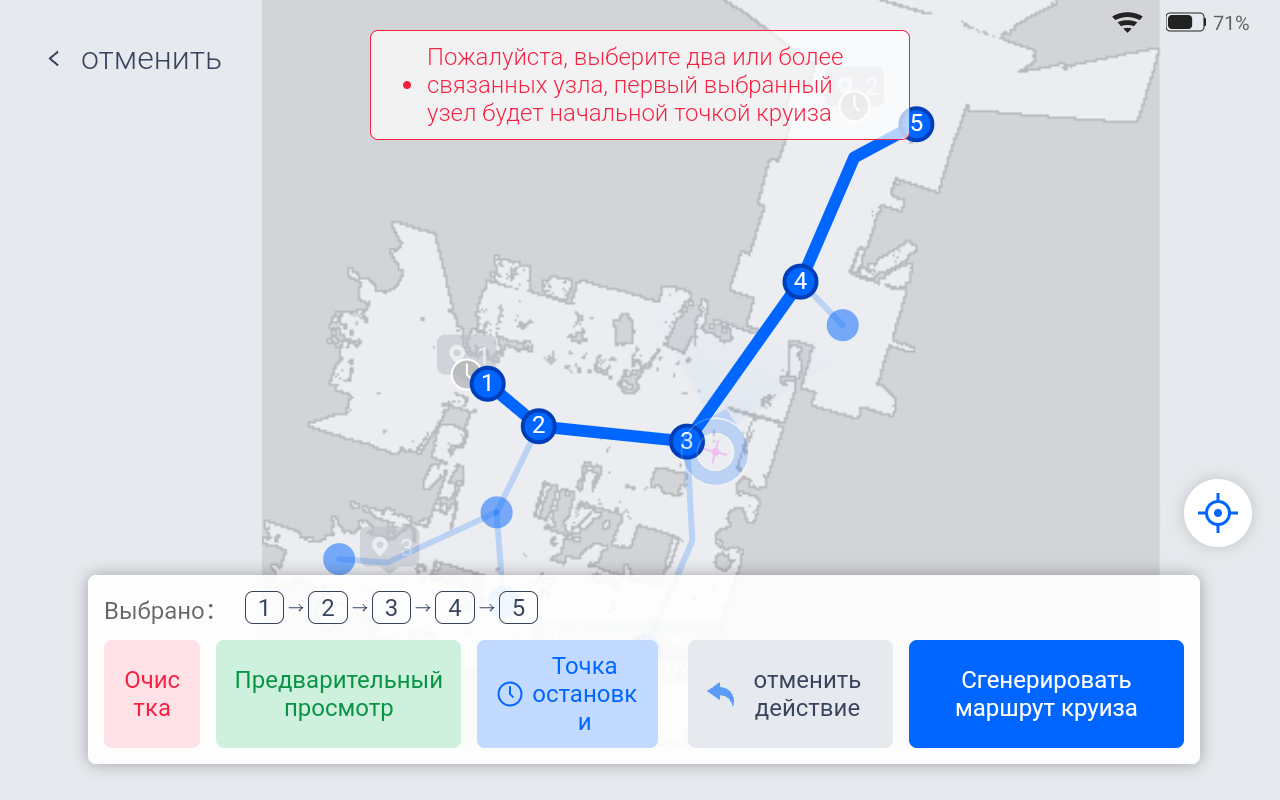
- Перейдите в разметку маршрута круиза нажав на [Добавить маршрут круиза] на нижней панели
- Выбрав узлы, через которые робот будет проходить можно задать время, которое робот будет ожидать по достижению каждого или указанного узла в [Точка остановки] (по умолчанию 0 секунд), а так же предварительно увидеть получившуюся последоватленость движения [Предварительный просмотр]
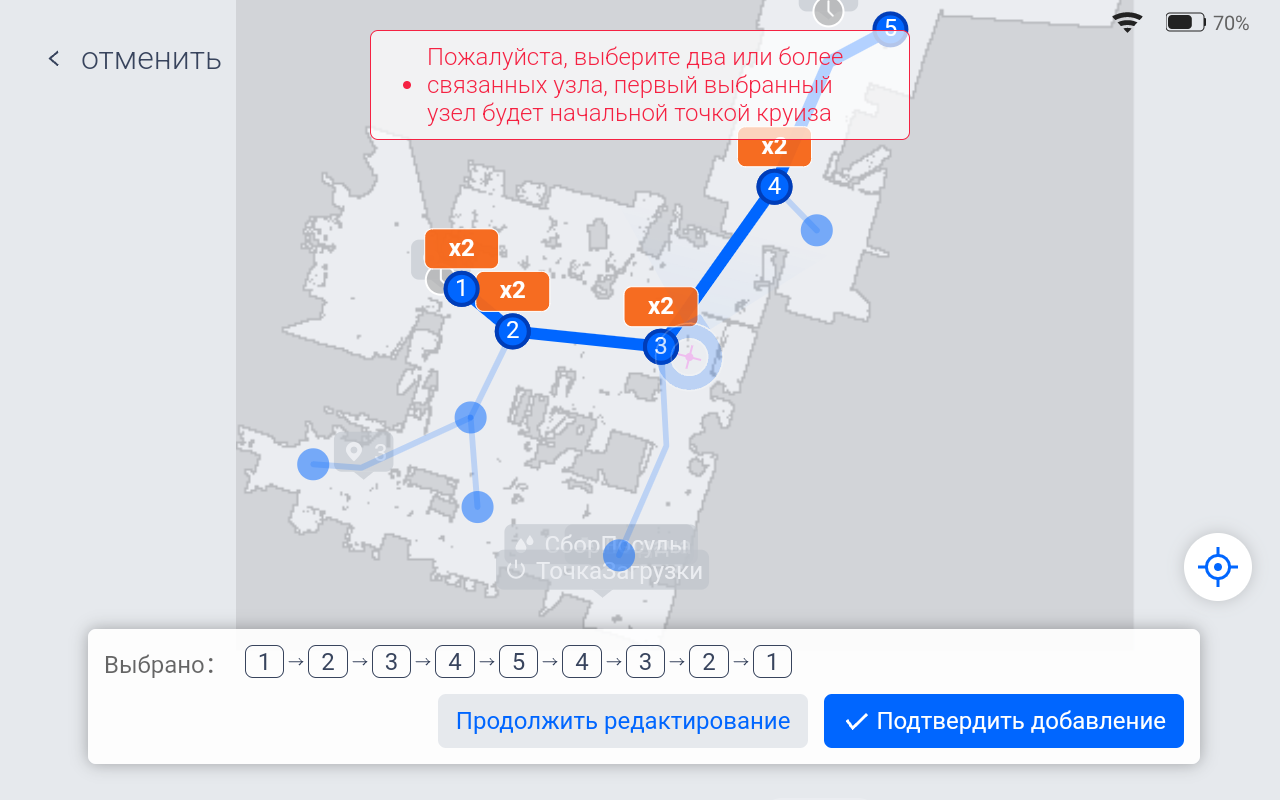
- Нажмите [Сгенерировать маршрут круиза] и далее, если результат удовлетворяет вызовите [Подтвердить добавление]
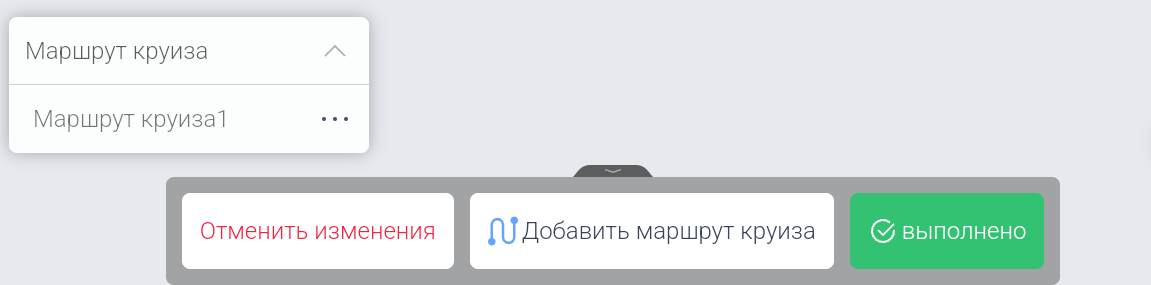
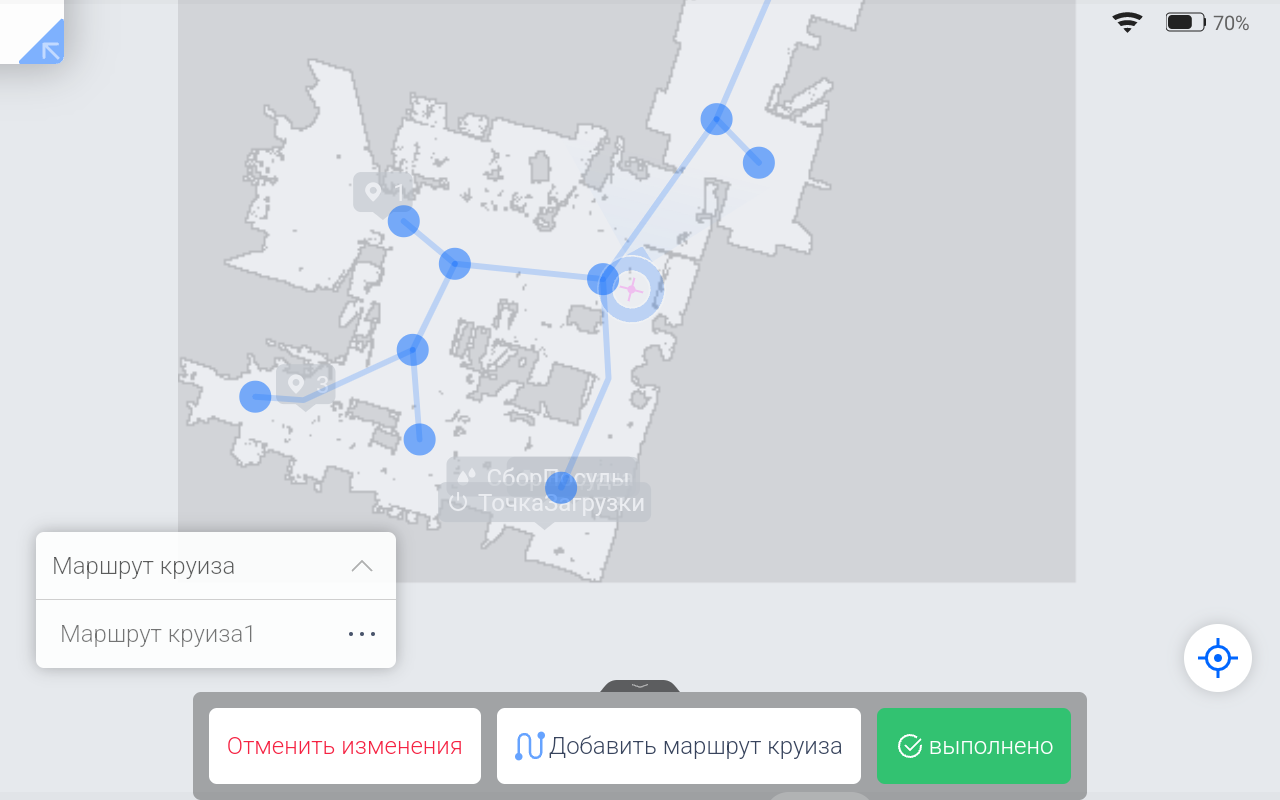
- После добавления маршрута круиза для сохранения необходимо нажать [Выполнено] и загрузить карту в облако для синхронизации отредактировать(изменить/удалить/переименовать) выбранный маршрут нажав на три точки около маршрута
Круиз по точкам доставки:
- Перейдите в [Круиз] из Главного меню приложения
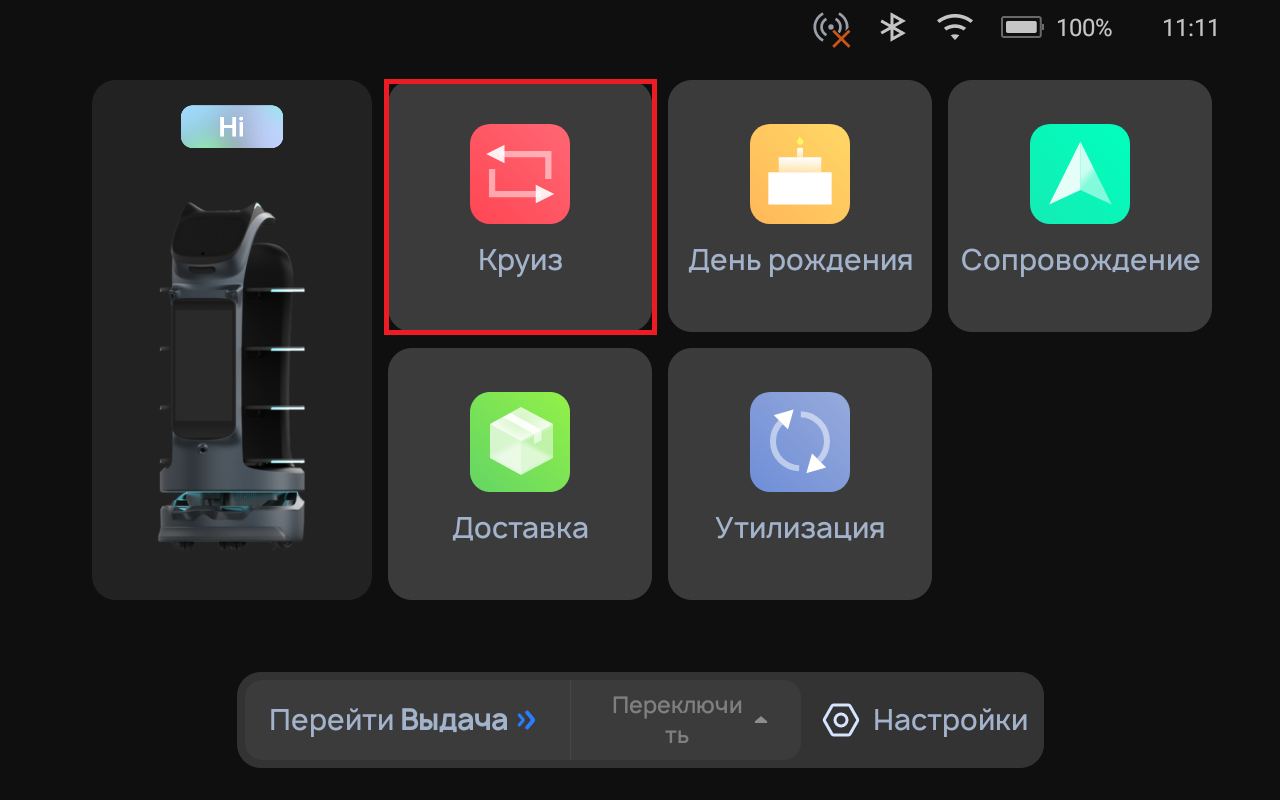
- В правом верхнем углу окна можно открыть общие настройки режима круиза нажав на знак Шестеренку, вернуться к точке ожидания нажав на знак Вернуться.
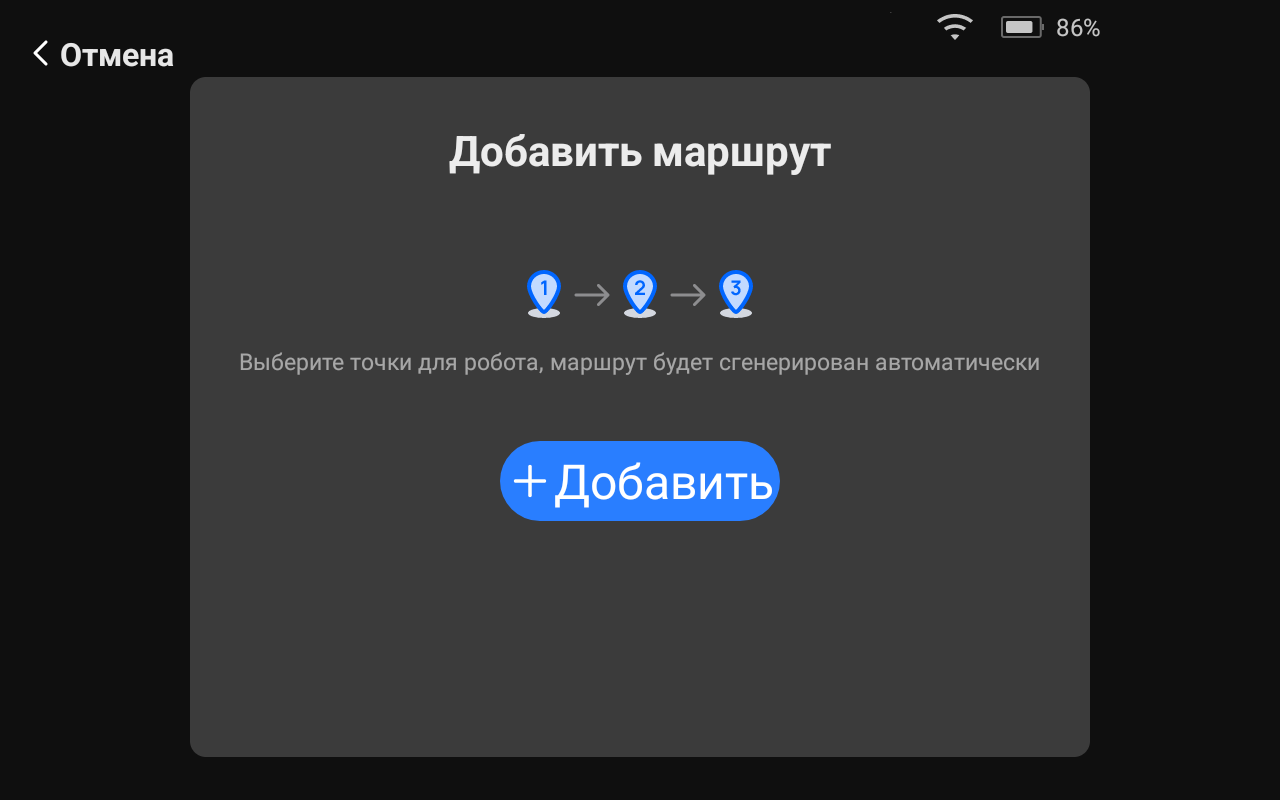
Чтобы добавить новый сгенерированный маршрут по точкам доставки нажмите на знак Плюс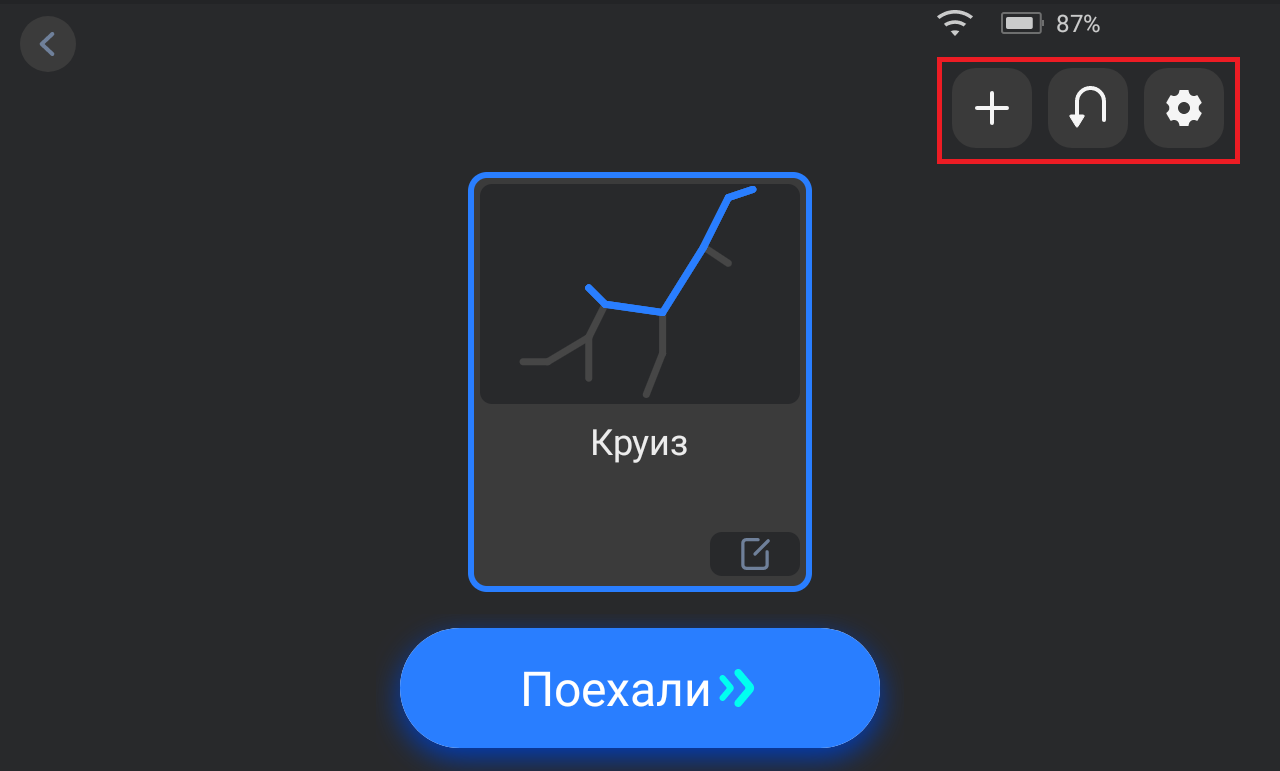
- Нажмите [Добавить] и далее нажимайте на названия точек доставке в нужной очередности
- Нажмите [ОК] для сохранения последовательности точек
- После подтверждения открывается меню полной конфигурации круиза:
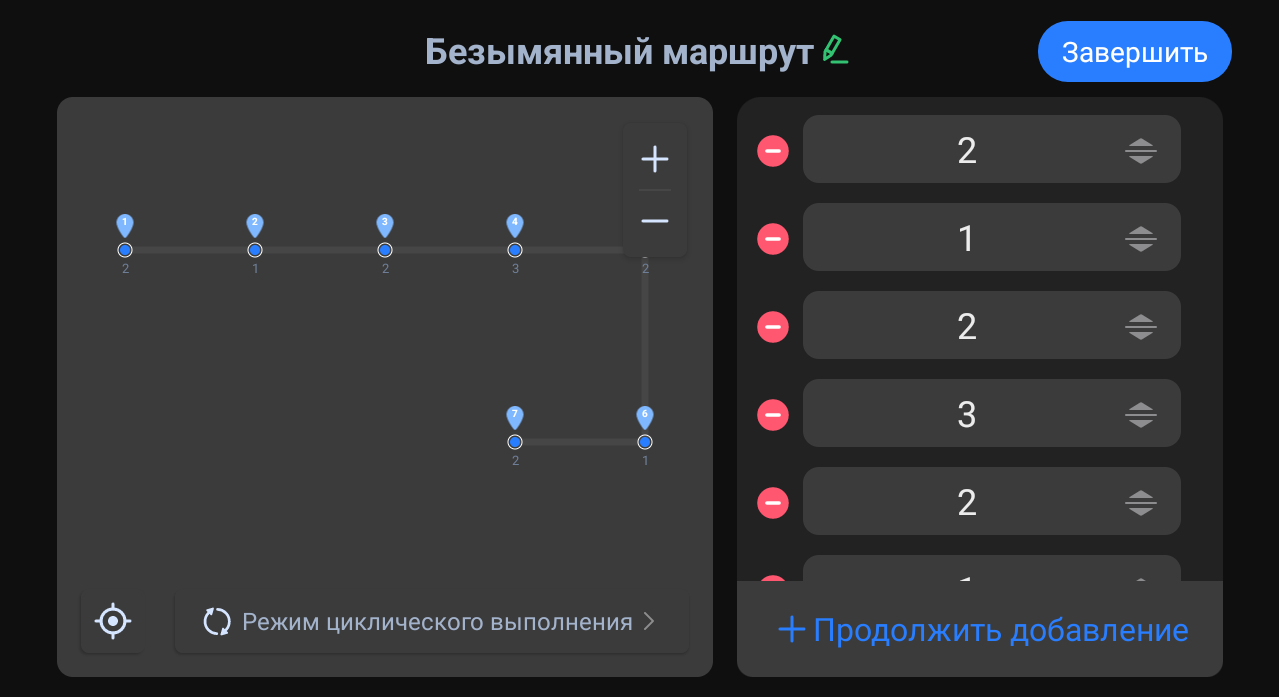 В нем можно отредактировать последовательность точек в правом блоке меню, изменить имя круиза сверху меню, а так же изменить “Цикличность” маршрута нажав [Режим циклического выполнения] снизу слева.
В нем можно отредактировать последовательность точек в правом блоке меню, изменить имя круиза сверху меню, а так же изменить “Цикличность” маршрута нажав [Режим циклического выполнения] снизу слева. 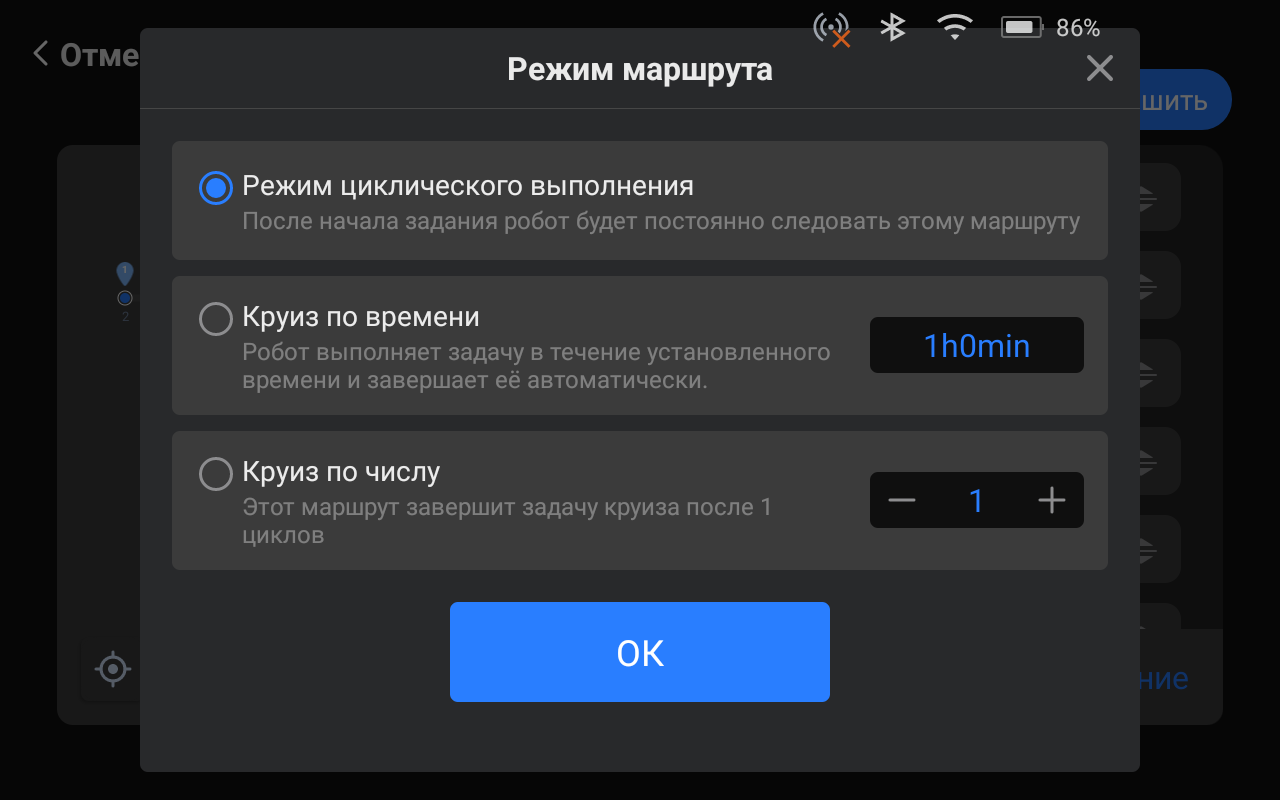
- Из меню конфигурации круиза нажмите [Завершить] для подтверждения добавления маршрута.
Доставка
Доставка — это основной режим работы робота-официанта, при котором персонал загружает приготовленный заказ на полку-поднос робота и через операционную панель указывает точку доставки — соответствующую зону около стола. После этого робот автономно следует к указанному месту, где посетители могут либо самостоятельно забрать свой заказ, взаимодействуя с интерфейсом робота, либо дождаться помощи обслуживающего персонала. По завершении доставки робот подтверждает выполнение задачи и возвращается на базовую станцию или ожидает следующего задания.
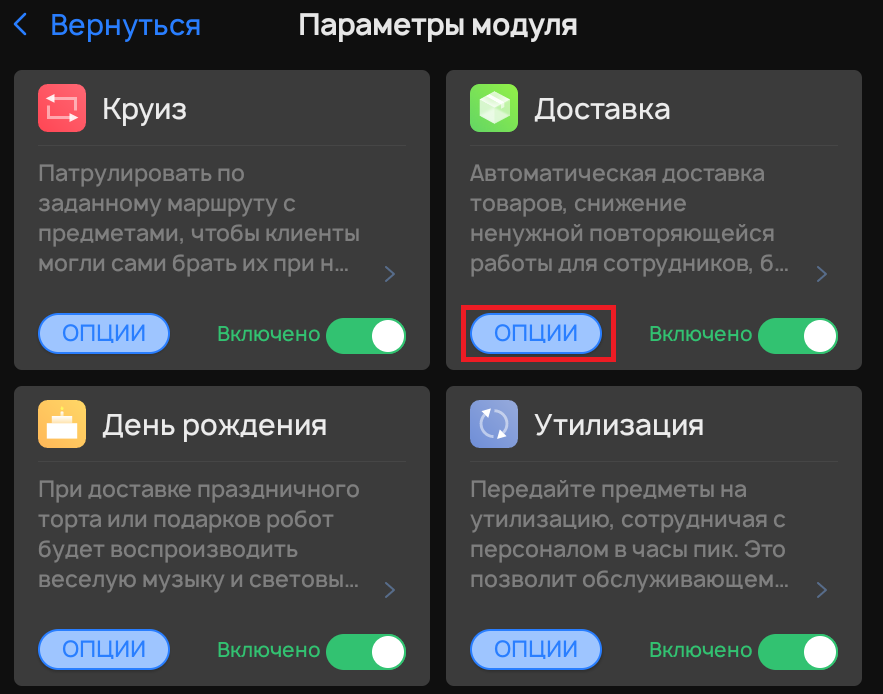
Конфигурацию режима доставки можно вызвать из меню настроек модулей (режимов) по следующей инструкции:
- Перейдите в [Настройки] из Главного меню приложения
- В меню навигации по разделам найти раздел - [Функции робота] и перейти в [Настройку модулей]
- Перейти в [ОПЦИИ] режима Доставка
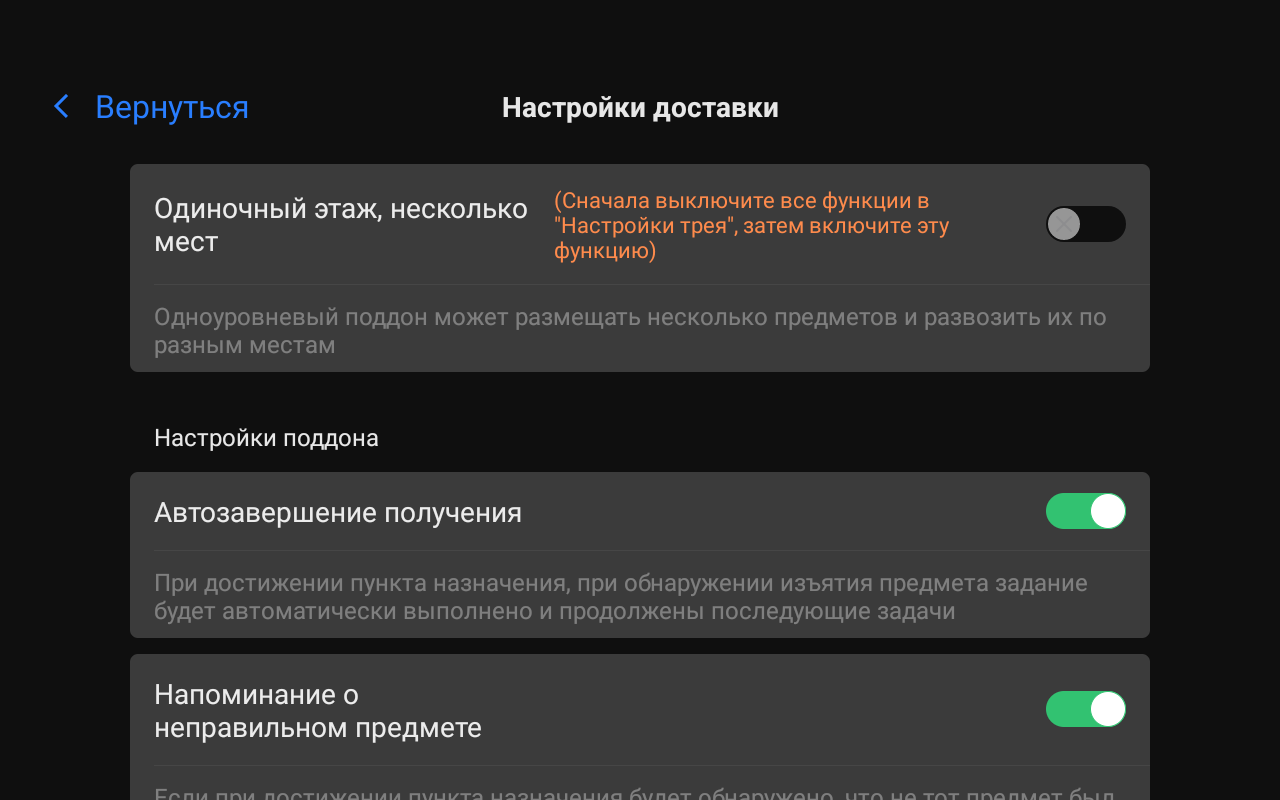
 В этом разделе настроек можно изменить скорость доставки, приоритет очередности, время ожидания по прибытие к точке, точку возврата после завершения задачи, а так же выбрать аудиофайлы, которые будут проигрываться при работе.
В этом разделе настроек можно изменить скорость доставки, приоритет очередности, время ожидания по прибытие к точке, точку возврата после завершения задачи, а так же выбрать аудиофайлы, которые будут проигрываться при работе.
Также активируются особенности режима [Доставка] такие как:- Автозавершение при получении (доступно только при следовании правилу: один поднос - один заказ)
- Голосовое напоминание о получение не своего заказа
- Активация функции плавного движения для доставки напитков и жидкостей
- Несколько заказов на одной полке; позволяет назначать одну полочку на несколько точек
День рождения
День рождения - режим специальной доставки, служит для отделения фраз и аудиоконтента поздравлений от аудиоконтента для регулярного использования.
Утилизация/Сбор
Сбор - дополнительный режим, который позволяет задействовать робота в процессах постобслуживания, например сбор грязной посуды. Требует обязательного добавления следующих специальных точек на карте: Моечная, Точка утилизации
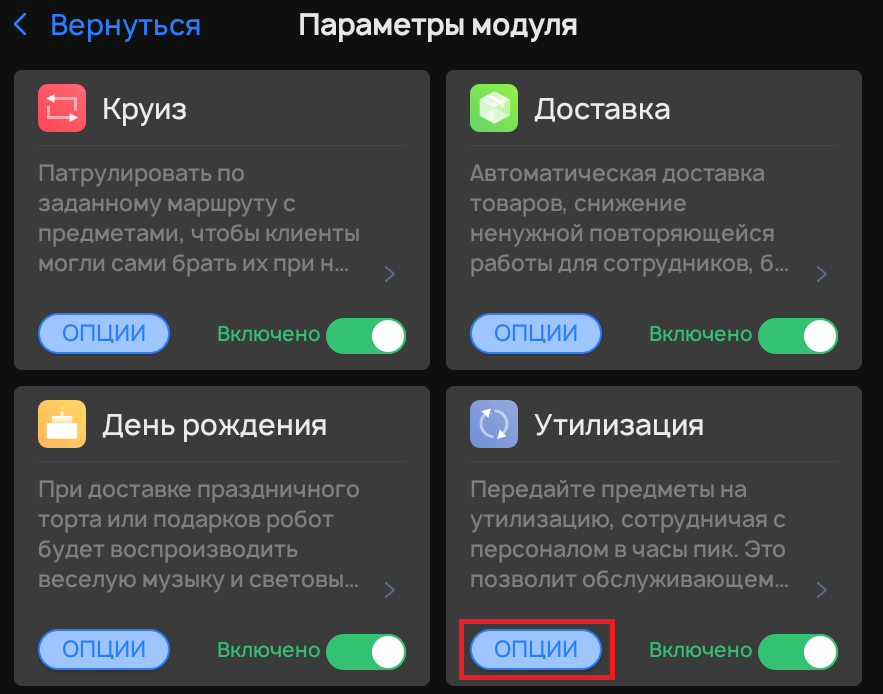
Настройка параметров режима устанавливается в разделе по следующему пути:
- Перейдите в [Настройки] из Главного меню приложения
- В меню навигации по разделам найти раздел - [Функции робота] и перейти в [Настройку модулей]
- Перейти в [ОПЦИИ] режима Утилизация
 Устанавливается поведение на точках сбора и утилизации, скорость движения, а так же голосовые функции для этого режима.
Устанавливается поведение на точках сбора и утилизации, скорость движения, а так же голосовые функции для этого режима.
Сопровождение
Сопровождение и приветствие - это режим, который подразумевает встречу, привлечение и приветствие гостей и посетителей. Робот стоит на заданной точке, откуда также может помочь в рассадке гостей или сопроводить их до нужного стола. Требует обязательного добавления специальной точки на карте: Точка приветствия