Быстрый старт
Описание шагов, которые необходимо сделать с роботом для ввода его в эксплуатацию.
Начало работы
Активация
Пользователь получает робота в неактивированном состоянии. Для активации робота Он должен обратиться на портал технической поддержки ROBOHELP и передать необходимые данные:
- Наименование компании
- Дата покупки
- Предположительный регион использования робота (Например, Воронежская область, г.Воронеж)
- Серийный номер робота
- Электронный почтовый ящик, на который будет привязан аккаунт В ответ пользователь получает данные для входа в личный кабинет Бизнес платформа PUDU и активированного робота, готового к работе.
Проверьте почтовый ящик, там будут данные авторизации от аккаунта, сохраните их. Пароль рекомендуется изменить! 
Шаг 1. Подготовка и запуск
Индустриальные роботы Pudu T300 имеют схожие с сервисными роботами от Pudu Robotics требования к соответствию помещений. Однако индустриальные роботы рекомендуют более ответственного соблюдения требований для обеспечения безопасности
1. Требования к поверхностям пола
Поверхность, по которой перемещается робот, должна обеспечивать стабильность и безопасность перевозки грузов.
- Ровность: Допустимый перепад высот на стыках покрытий (плитка, стыки плит) не должен превышать 20 мм.
- Уклон: Максимально допустимый уклон для безопасного движения не более 5% (~3°). Избегайте кабель-каналы, и имейте резервный обходной путь для минования.
- Материалы: Робот адаптирован для работы на большинстве типов покрытий: керамическая плитка, ламинат, наливной пол, терраццо, резиновые покрытия.
- Зазоры: Глубина зазоров (например, между плиткой и лифтом) не должна превышать 35 мм.
2. Требования к пространству и навигации
- Ширина проходов и проемов:
- Абсолютный минимум для проезда в одну сторону с грузом не превышающим габариты робота: 0.60 м.
- Рекомендуемая ширина для комфортного и безопасного проезда: не менее 0.8 м.
- Для двустороннего движения (например, чтобы робот мог разъехаться с человеком или другим роботом) ширина коридора должна быть не менее 1.2 м.
3. Идентификация особых и опасных зон
Некоторые объекты и зоны требуют особого внимания при построении карты.
- Тонкие препятствия: Лазерный лидар (LIDAR) может не обнаруживать тонкие объекты диаметром менее 30 мм (ножки стульев и столов, стоперы дверей, тонкие поручни, хромированные решетки). Такие объекты необходимо вручную отметить на карте как виртуальные стены или запретные зоны во время процесса настройки.
- Зеркальные и стеклянные поверхности: Большие зеркала, стеклянные стены и двери могут дезориентировать систему навигации. Рекомендуется оклеить их матовой пленкой на высоту проезда робота или отметить на карте зоной сниженной скорости.
- Черные и поглощающие поверхности: Глубоко матовые черные поверхности (стены, ковры) могут поглощать сигнал лидара и восприниматься как бесконечное пространство. Их необходимо огородить физическими препятствиями или отметить на карте.
- Опасные зоны: Лестницы, пандусы с крутым уклоном, зоны погрузки, лифтовые шахты должны быть обязательно обозначены на цифровой карте робота как запретные зоны с отступом не менее 0.5 м для создания буфера безопасности.
- Электрические кабели и провода: Категорически запрещено наличие незакрепленных (лежащих на полу) электрических кабелей, проводов удлинителей или сетевых шнуров на пути следования робота.
Шаг 2. Запуск
Перед запуском стоит осмотреть робота. При выявлении любых внешних дефектов, механических повреждений корпуса Не включайте робота, Не пытайтесь самостоятельно починить.
Для предотвращения случайного включения и повреждений в робота встроена специальная защита от самозапуска во время перевозки устройства с установленным аккумулятором,. Устройство будет оставаться в заблокированном состоянии до тех пор, пока вы не подключите его к оригинальному сетевому зарядному устройству. Только после подключения к зарядке защитный режим автоматически снимается, и устройство можно будет включить в штатном режиме. Не пытайтесь активировать его другими способами — это предусмотрено конструкцией для вашей безопасности и сохранности техники.
Для запуска робота удерживайте кнопку в течении 3 секунд для включения. 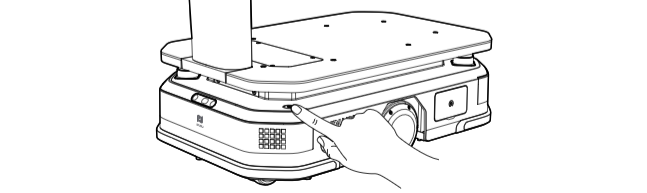 После включения на стойке загорятся два световых индикатора.
После включения на стойке загорятся два световых индикатора.
Для выключения робота удерживайте указанную кнопку в течении 2 секунд - на операционном экране появится вспывающее меню для выключения и перезагрузки. Выключение и перезагрузку можно вызвать через главное меню приложения нажав на соответсвующую кнопку в правом углу под изображением робота 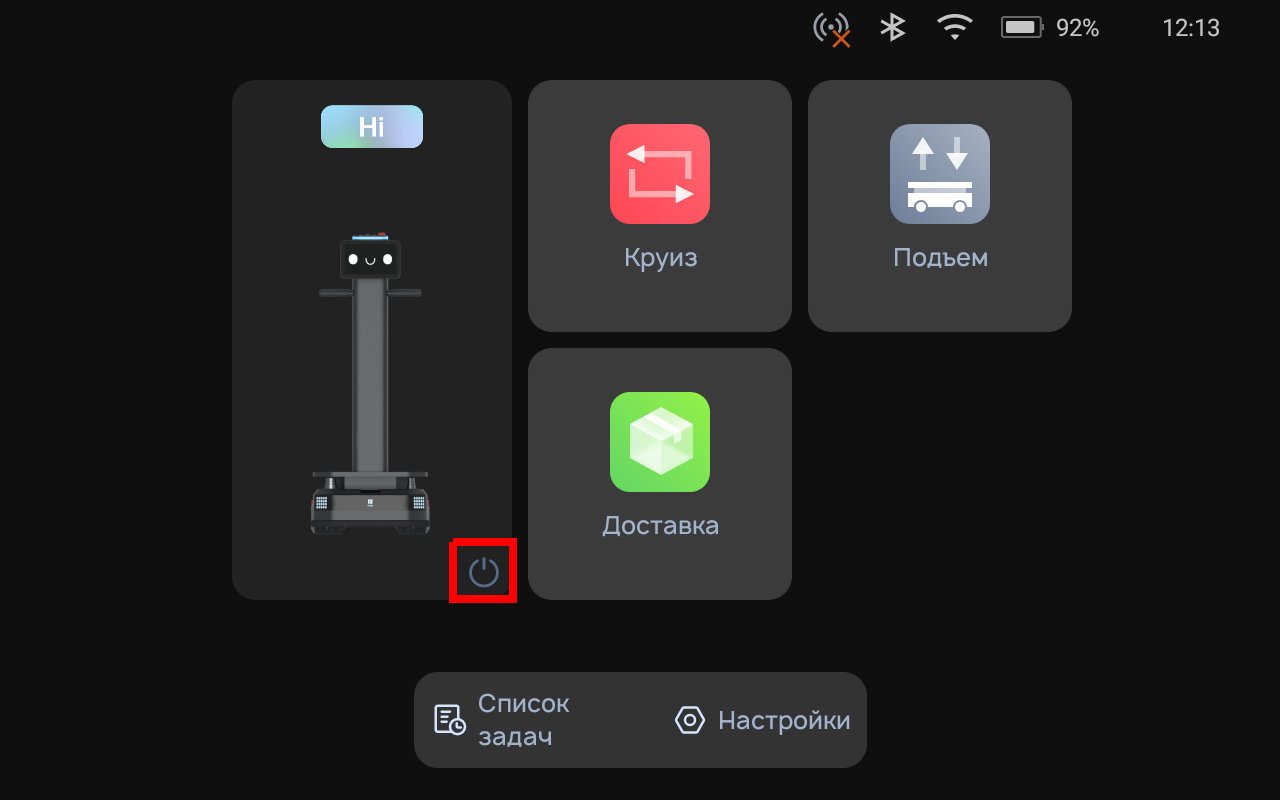
Если при запуске робота, например с другой зоны, на роботе уже существует карта другой территории, а на новой территории необходимо создать свою карту для прерывания локализации робота и перехода к взаимодействию с интерфейсом настроек держите два пальца на любой части экрана около 20 секунд пока не появится доступ к интерфейсу

Шаг 3. Создание первой карты.
Запустив робота после активации, если нет карт, робот предложит создать новую - необходимо перейти в [Начать составление карты]; 
 В ином случае нажмите [Добавить] для создания новой карты на месте;
В ином случае нажмите [Добавить] для создания новой карты на месте; 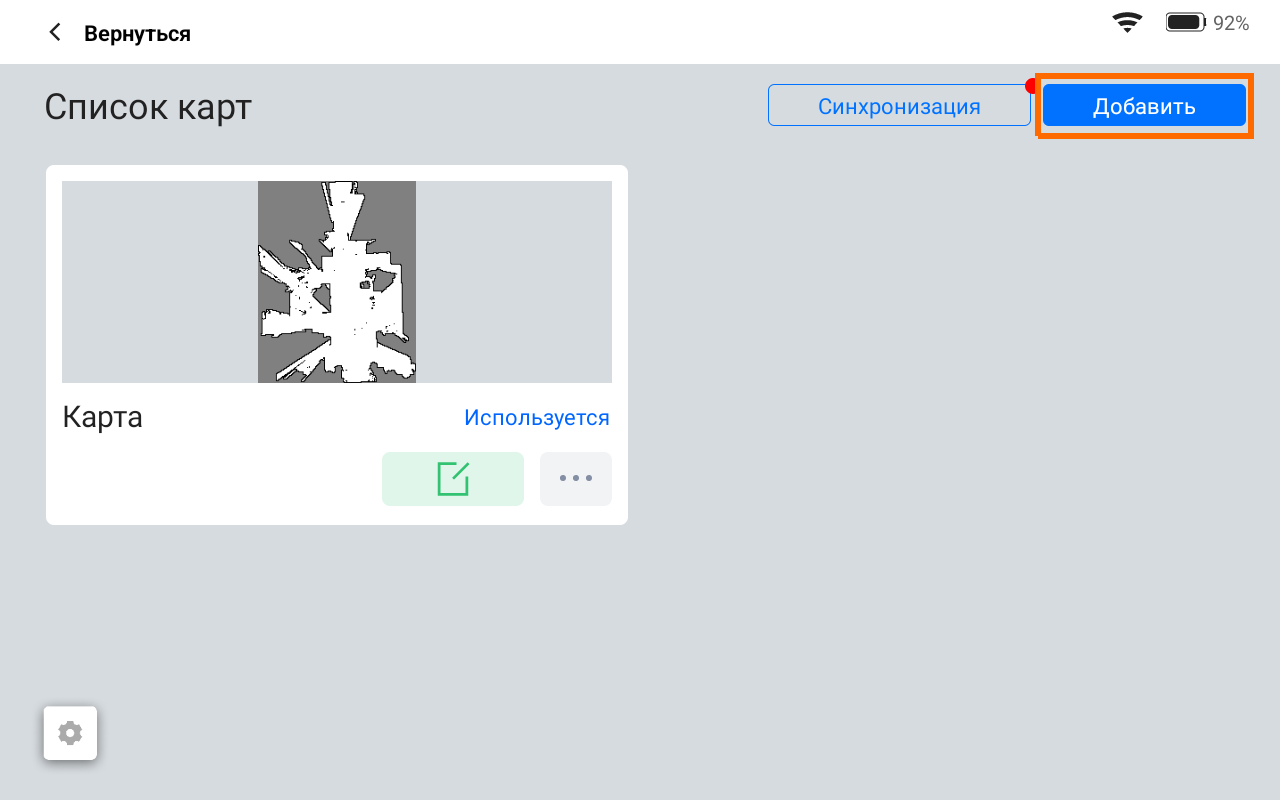 Перед созданием карты необходимо выбрать тип проекта: если планируется использование карты в мультиэтажном сценарии выбирайте второй. Для обычной карты, без данных о этаже строения выбирайте первый тип и переходите к следующему шагу нажав [Следующий проект]
Перед созданием карты необходимо выбрать тип проекта: если планируется использование карты в мультиэтажном сценарии выбирайте второй. Для обычной карты, без данных о этаже строения выбирайте первый тип и переходите к следующему шагу нажав [Следующий проект] 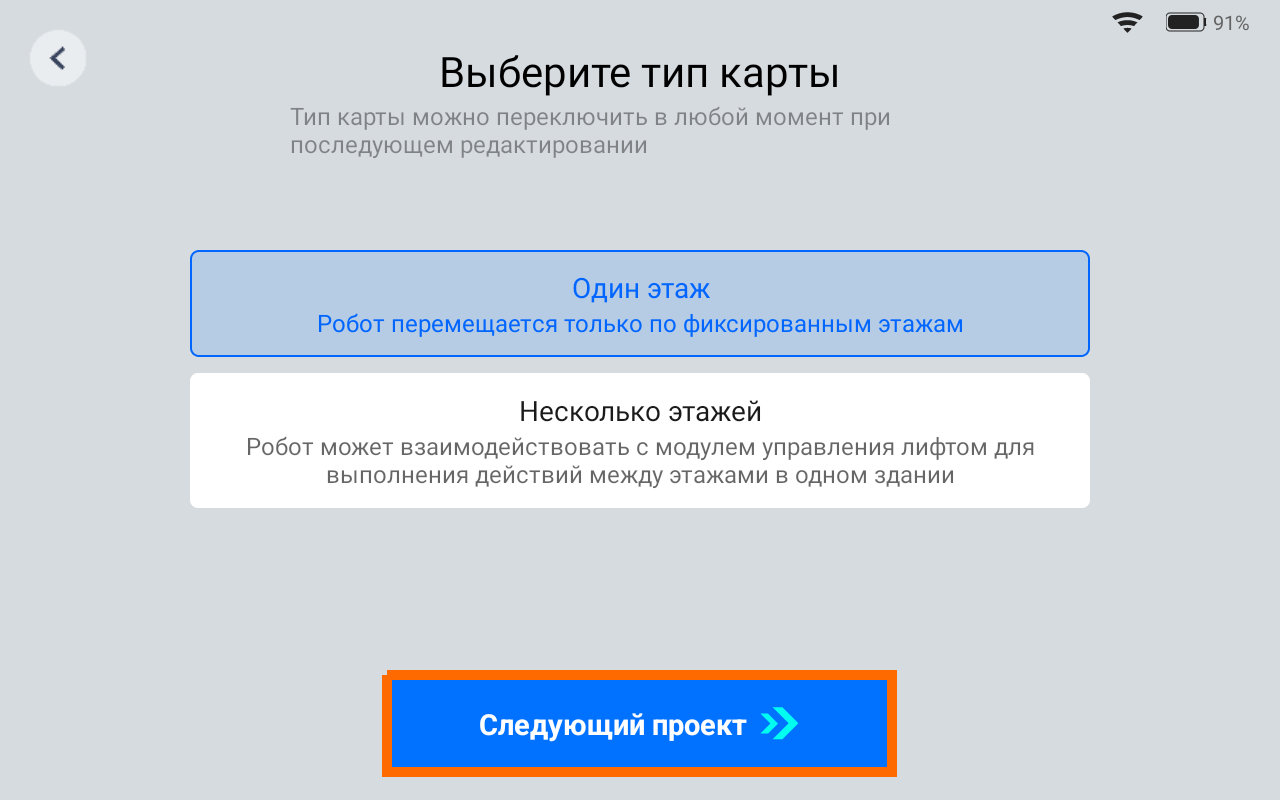 Введите название карты и нажмите следующий проект
Введите название карты и нажмите следующий проект 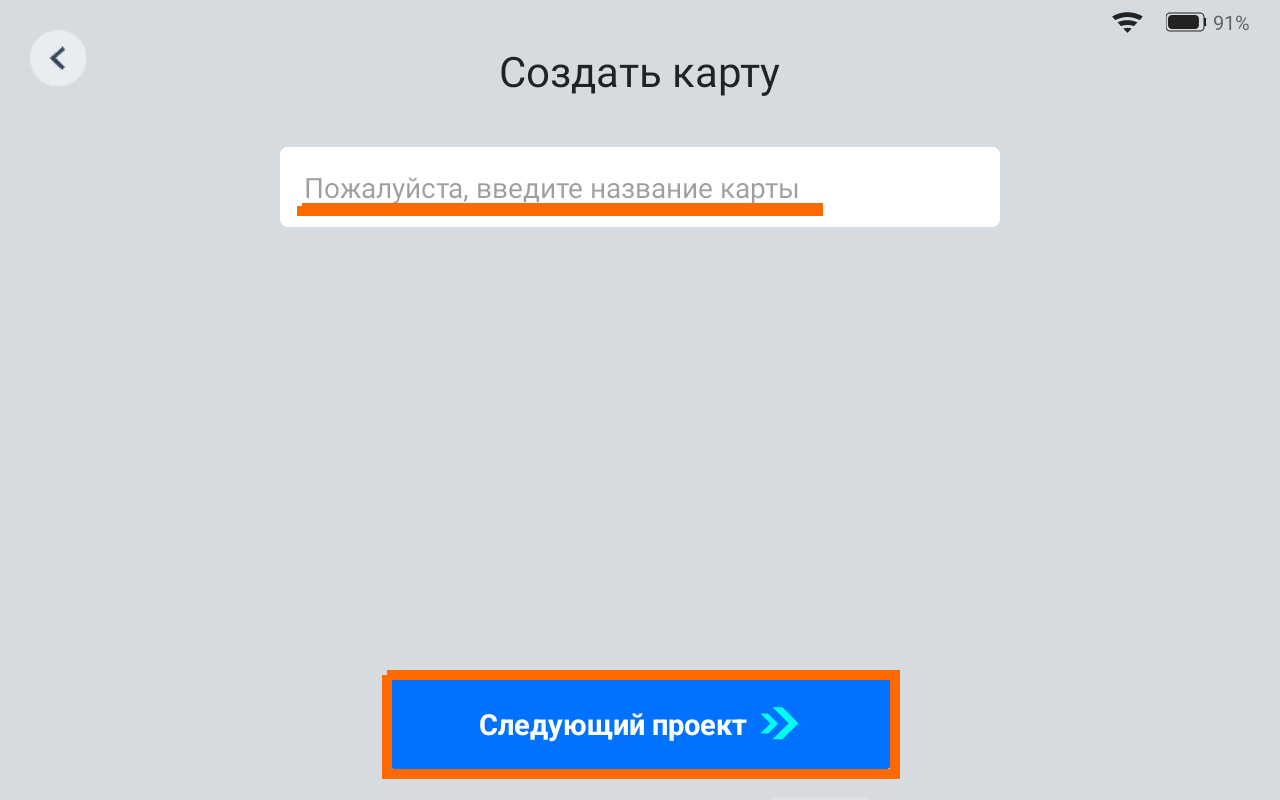 Для карты каждого этажа на этом этапе необходима будет привязка номера этажа для ассоциации карты и реального этажа здания
Для карты каждого этажа на этом этапе необходима будет привязка номера этажа для ассоциации карты и реального этажа здания
В данном примере будем составлять карту одноэтажную карту методом VSLAM + Laser, как самый точный и стабильный метод. Выберите VSLAM+Лазеры и нажмите [Следующий проект] 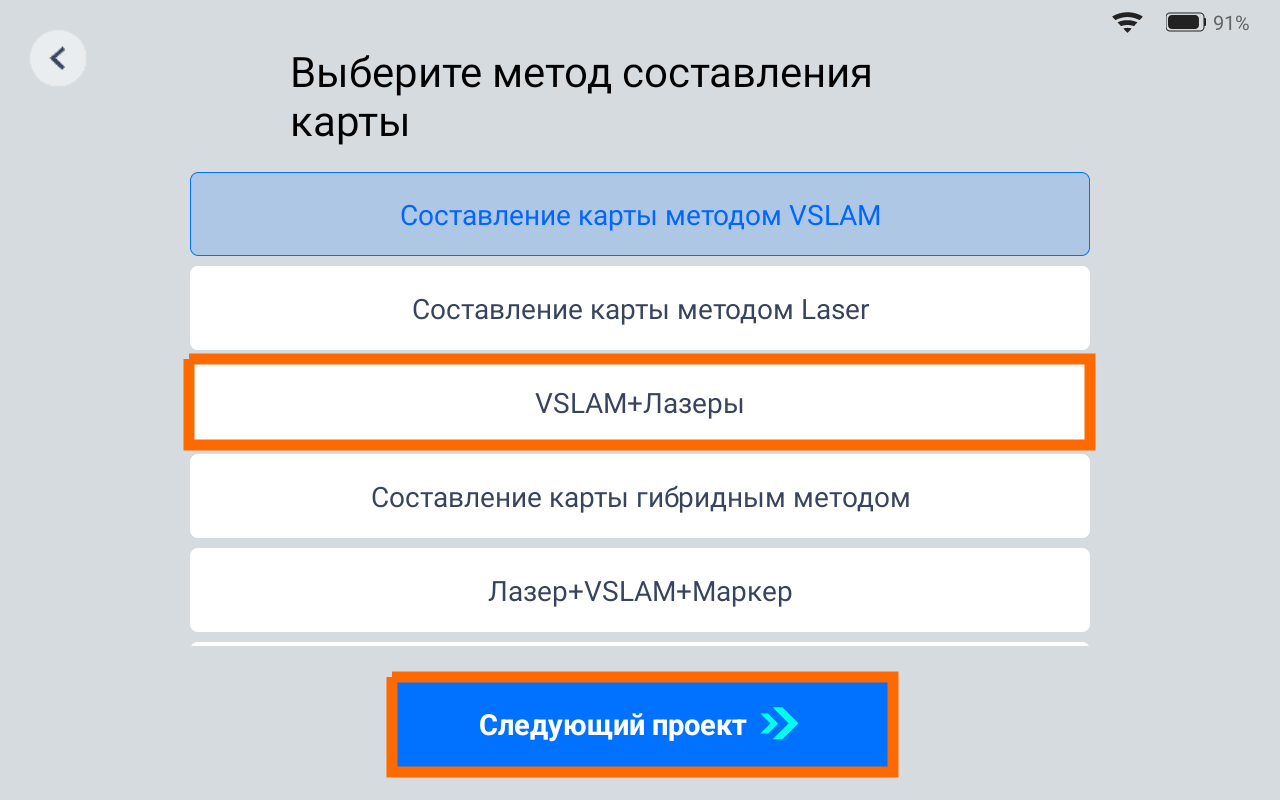
Метод Laser: Способ построения карты, использующий только данные лидара (лазерного сканера). Не рекомендуется, если планировка помещения (расположение мебели, предметов) часто меняется. При использовании этого метода, запускайте робота из угла помещения.
Метод Marker: Способ построения карты, использующий только специальные отражающие метки (маркеры) на потолке. Не рекомендуется для помещений с очень низкими (менее 2.2 м) или очень высокими (более 4.5 м) потолками.(Метки отсутсвуют в комплекте с роботом)
Метод VSLAM: Способ построения карты, использующий только уникальный рисунок потолка (светильники, балки, узоры). Не требует меток.
Гибридный метод: Самый мощный метод, объединяющий три метода выше (Laser, Marker, VSLAM) плюс данные со специальных 3D-камер для точного сканирования объема. Требует установки меток.
Метод VSLAM + Laser: Продвинутый метод, объединяющий алгоритмы VSLAM (рисунок потолка) и Laser (лидар). Использует дополнительные данные с 3D-камеры. Как и в методе Laser, рекомендуется начинать построение карты из угла помещения. Однако, если есть место с четким и уникальным рисунком потолка, можно начать построение карты с любого места.
Для каждого метода перед составлением карты ознакомьтесь с особенностями, рекомендациями и мерами предосторожности, или нажмите [пропустить] для продолжения 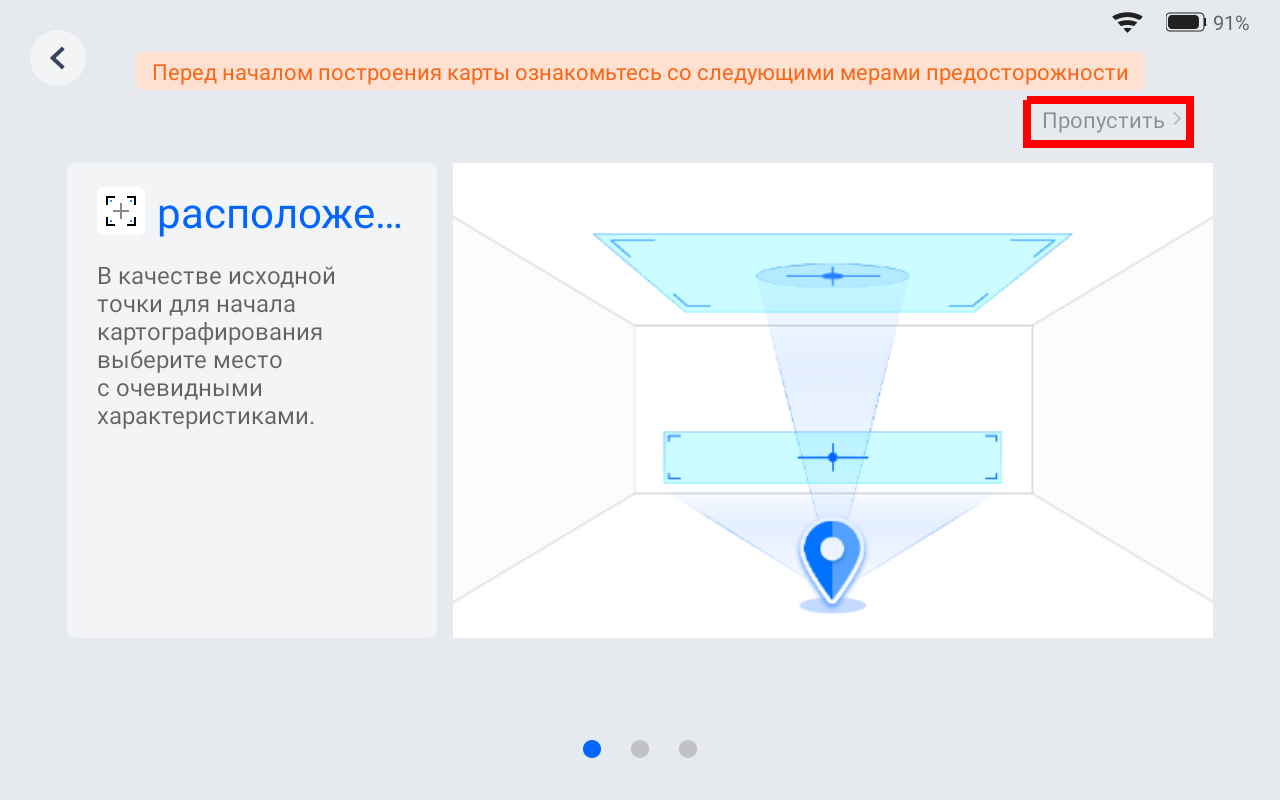 Начнется инициализация, во время инициализации нельзя двигать робота, так как он сохраняет данные о начальных условиях карты и активирует запись
Начнется инициализация, во время инициализации нельзя двигать робота, так как он сохраняет данные о начальных условиях карты и активирует запись  После инициализации Вы увидите следующий интерфейс: робот ,его ориентация, она будет обновляться в реальном времени с минимальной задержкой, начальная точка составления карты, которая отмечена звездочкой, кнопки для добавления точек назначения и специальных служебных точек. Обязательно запомните ориентацию и точку, где начиналось составление карты и медленно толкайте робота по всей территории, сканируя помещения, где робот будет задействован. Перемещайте робота медленно, если скорость высока - робот предупредит используя уведомления на экране и голосовое оповещение.
После инициализации Вы увидите следующий интерфейс: робот ,его ориентация, она будет обновляться в реальном времени с минимальной задержкой, начальная точка составления карты, которая отмечена звездочкой, кнопки для добавления точек назначения и специальных служебных точек. Обязательно запомните ориентацию и точку, где начиналось составление карты и медленно толкайте робота по всей территории, сканируя помещения, где робот будет задействован. Перемещайте робота медленно, если скорость высока - робот предупредит используя уведомления на экране и голосовое оповещение. 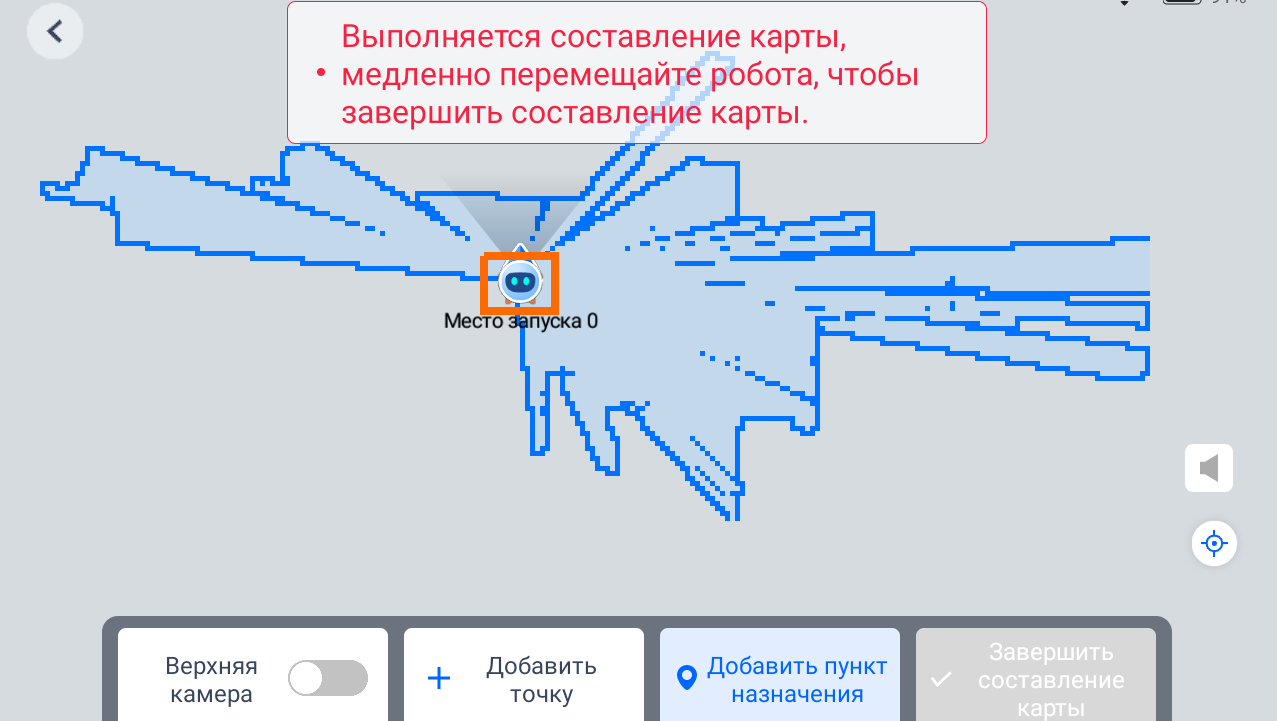
Для создания корректной карты робота нужно толкать (не тянуть), во время построения нельзя допускать пробуксовки и отрыва колес от земли. Если такое произошло, процесс создания карты нужно начинать сначала.
Во время или после(рекомендуемо) сканирования территории размечайте точки назначения, пункты погрузки, точки ожидания или служебные точки для активации соотвествующего функционала(работы с лифтами и воротами).
Ознакомьтесь с базовым пониманием разметки точек для составления корректной карты;
Пункт назначения - основная точка доставки, куда робот привозит заказы.
Точка погрузки заказов - стартовая точка и место ожидания робота, если не задано других. Здесь на робота загружают грузы и назначают задания. Робот автоматически возвращается сюда после завершения доставки.
Временное место парковки - место для ожидания и временного размещения после или во время задачи, как пункт промежуточной остановки. Требуется обязательная настройка если несколько роботов работают на одной карте.
Точка загрузки - опорная точка для точного позиционирования на карте. Важно: изменяется только через редактор карт! Позволяет переместить точку запуска робота, отличную от точки начала построения карты.
Ворота - точка интеграции с системами автоматических дверей. Требует установки дополнительного оборудования. Робот останавливается здесь для активации открытия дверей и ворот. Точка полки - место позицинионирования для транспортировки стелажей адаптированных под WHMS. —
Важно: При создании любой точки сохраняются точные координаты и ориентация робота в пространстве. Убедитесь, что робот расположен правильно перед созданием точки. Рекомендуется создавать точки с запасом свободного пространства для маневрирования и убедиться, что робот самостоятельно способен добраться до этой точки.
Пункт назначения - , можно добавлять “одним нажатием” используя [Добавить пункт назначения] и сразу вводить его название;  или добавить конфигурируемую точку;
или добавить конфигурируемую точку; 
Для завершения составления карты и сохранения верните робота в позицию, где начиналось построение карты, обычно оно отмечается как Звезда с подписью Место Запуска и нажмите [Завершить составлевление карты] 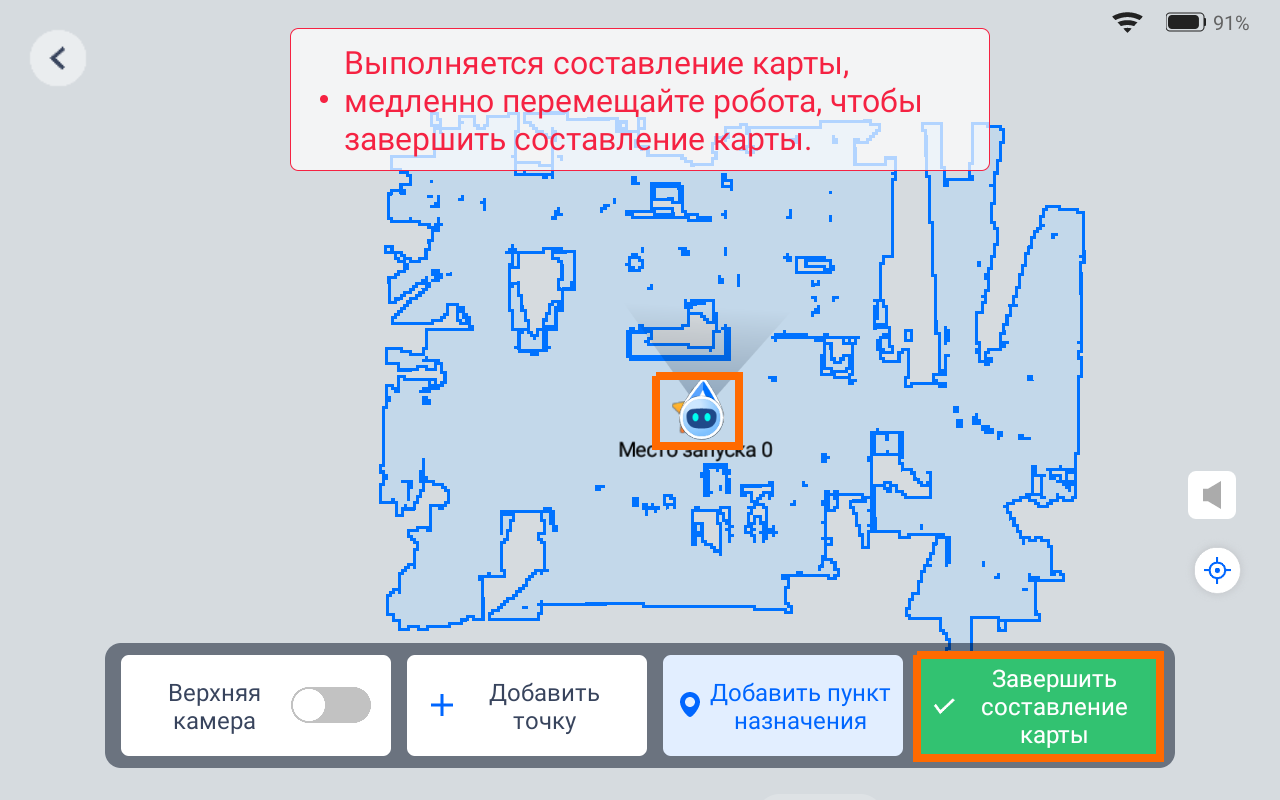 Подтвердите нахождение в точке начала составления карты нажав [Ок]
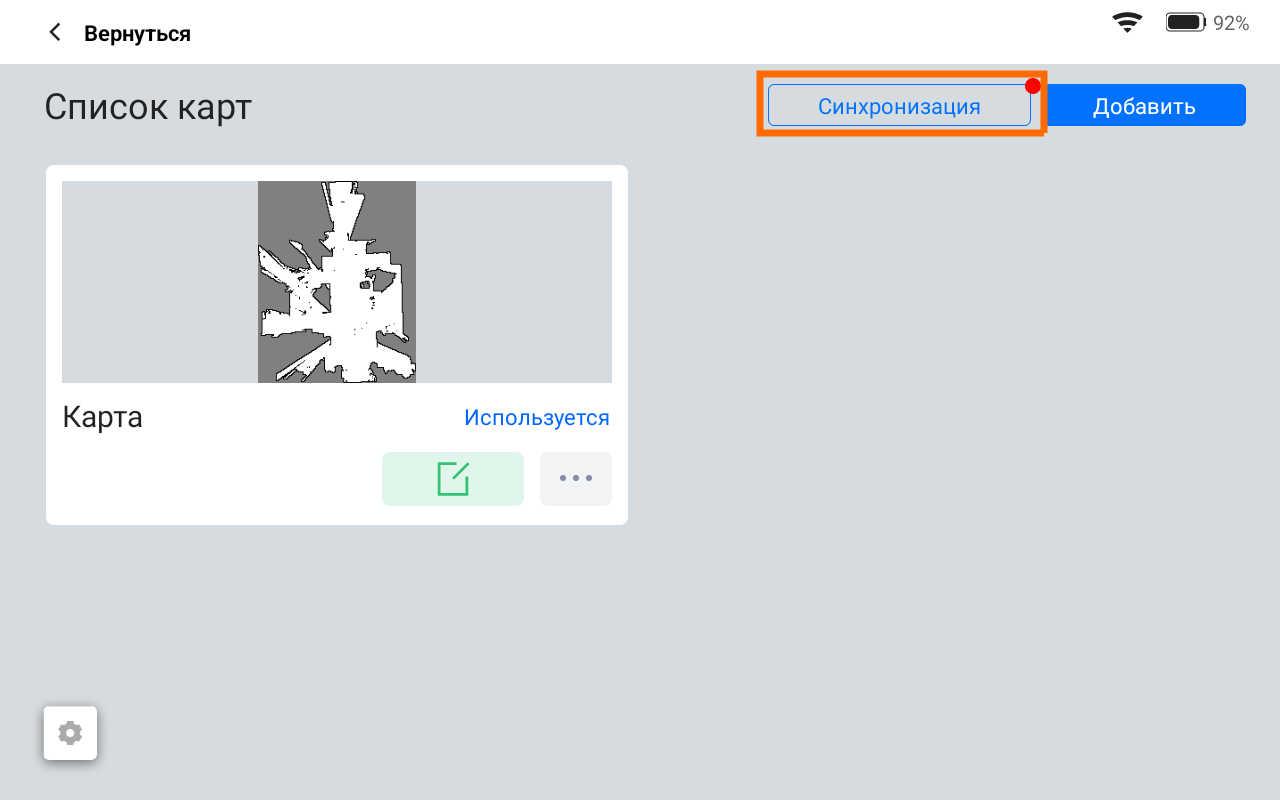
Подтвердите нахождение в точке начала составления карты нажав [Ок]  Дождитесь сохранения карты локально на роботе, и не забудьте загрузить карту в облако PUDU
Дождитесь сохранения карты локально на роботе, и не забудьте загрузить карту в облако PUDU 
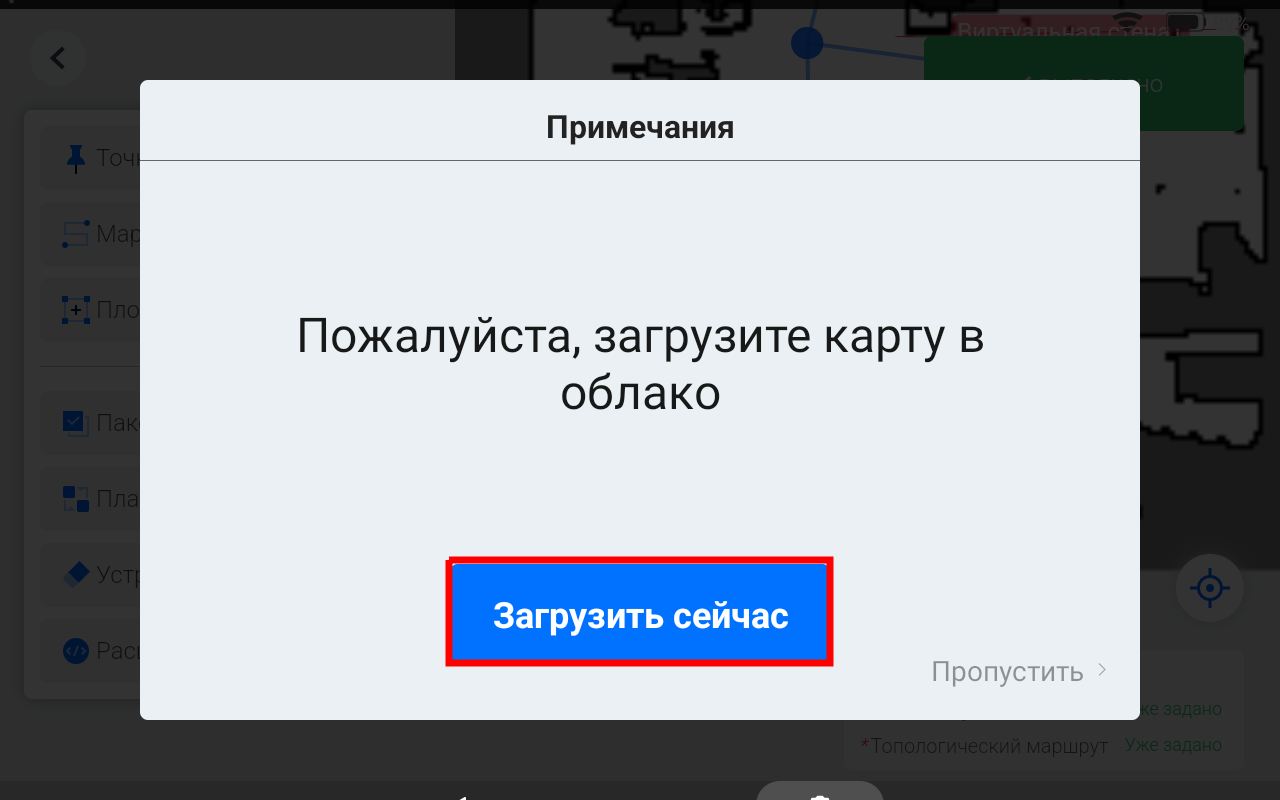
Если карту не удается загрузить в облако попробуйте использовать другую сеть WiFi, а так же убедитесь, что эта сеть имеет доступ к Интернету.
После загрузки пользователя возвращает в меню выбора карт, где в списке появится новая карта - ее можно отредактировать и расширить 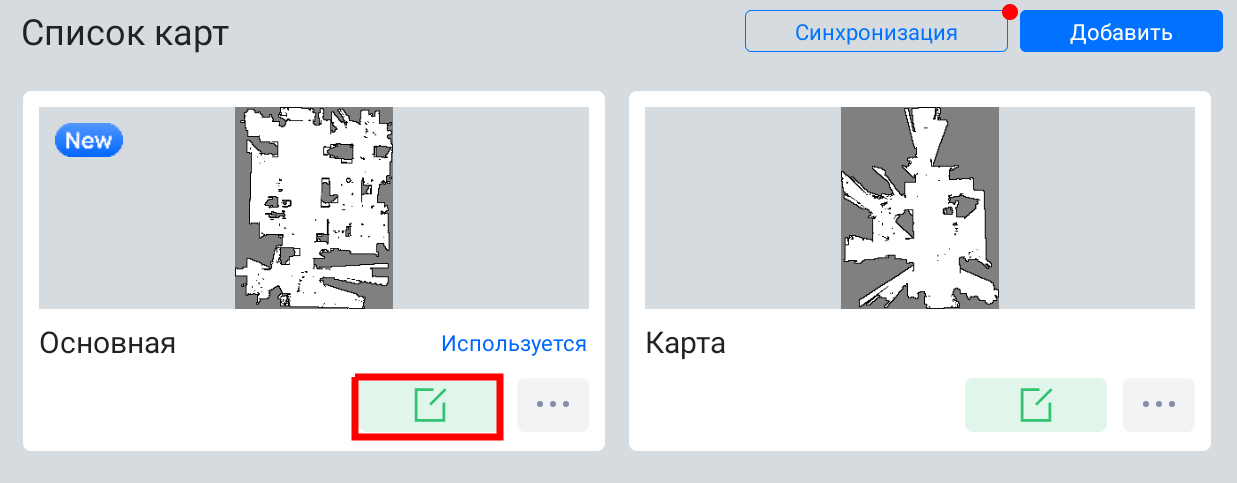
Шаг 4. Разметка и улучшение карты.
При использовании методов Laser, VSLAM + Laser, Гибридный на карте появляются артефакты сканирования, для очистки перейдите в инструмент [Устранить помехи] 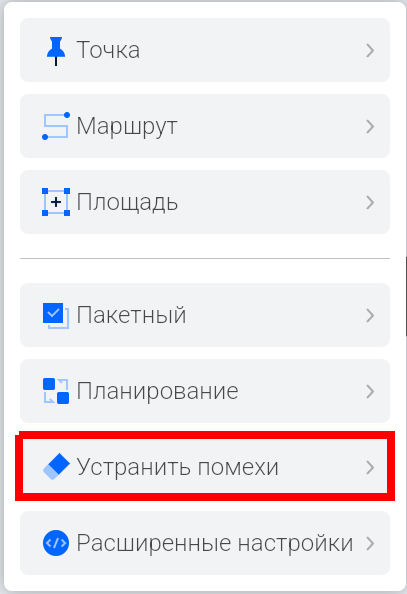 Следуйте инструкции на роботе, чтобы удалить ошибочно отсканированные препятствия
Следуйте инструкции на роботе, чтобы удалить ошибочно отсканированные препятствия 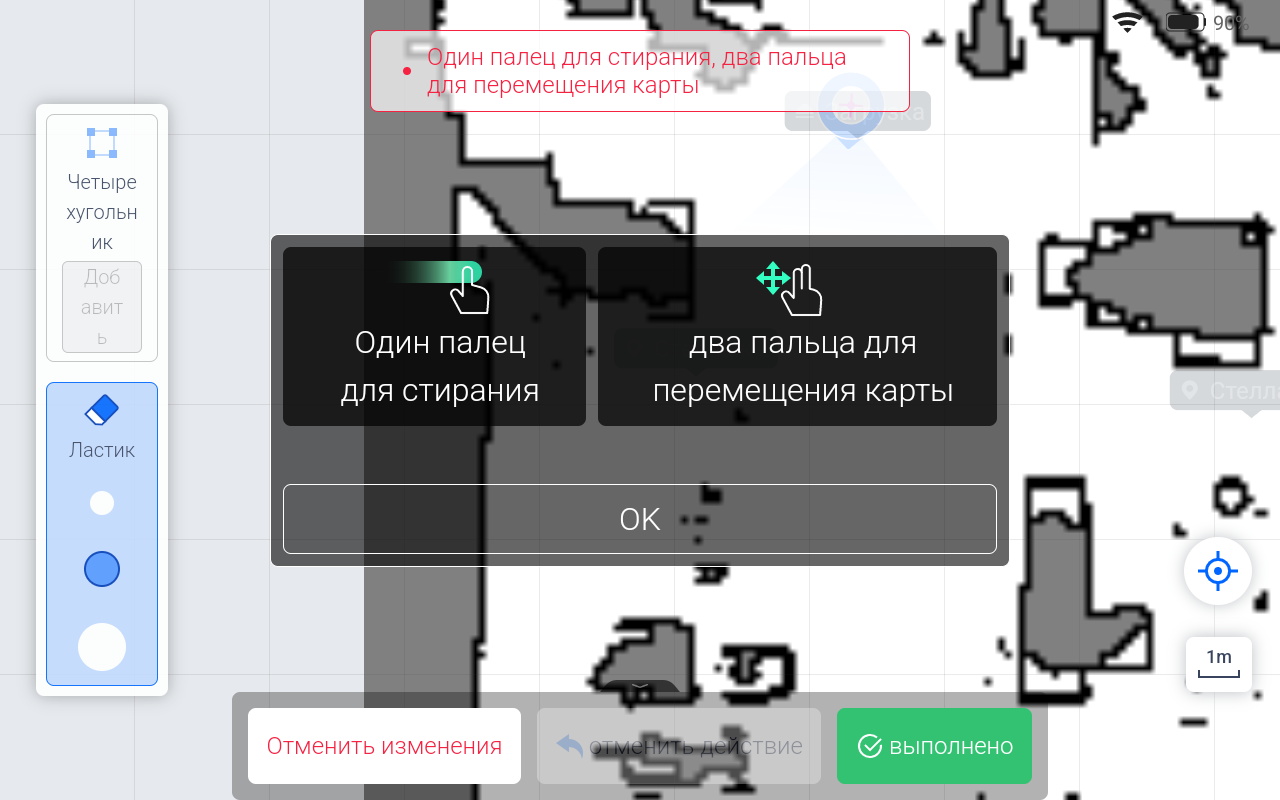 Нажмите [Выполнено], чтобы сохранить изменения или [Отменить изменения], например если было удалено лишнее.
Нажмите [Выполнено], чтобы сохранить изменения или [Отменить изменения], например если было удалено лишнее.
Для безопасности робот должен обходить участки с риском падения или столкновения: лестницы, лифты, подъемники, мебель с выступающими углами или краями. Такие места необходимо отметить на карте.
Используйте иструмент [Площади] на панели редактирования, чтобы нарисовать виртуальные стены, зоны с риском падения, особые зоны ограничения RGBD, а так же установите ограничения скорости там, где это необходимо 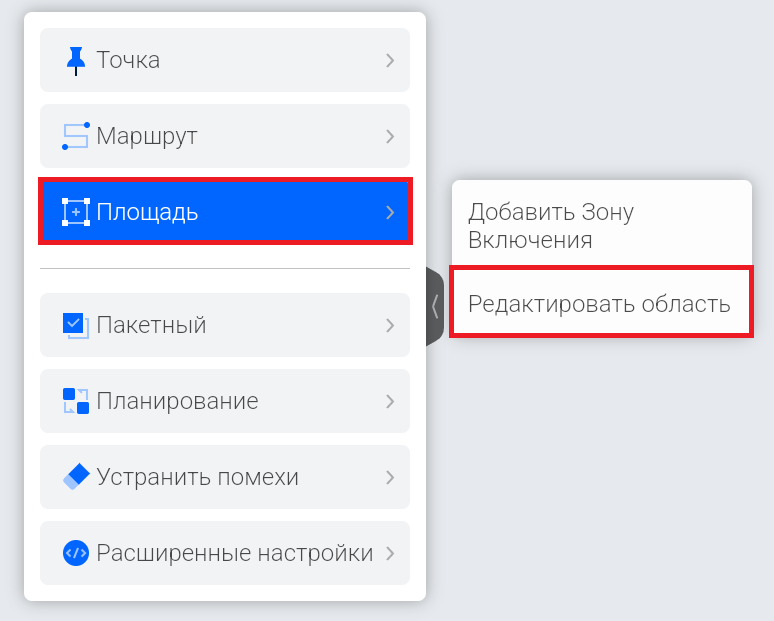 Нажмите [Добавить область] и выберите следующий тип особых зон
Нажмите [Добавить область] и выберите следующий тип особых зон 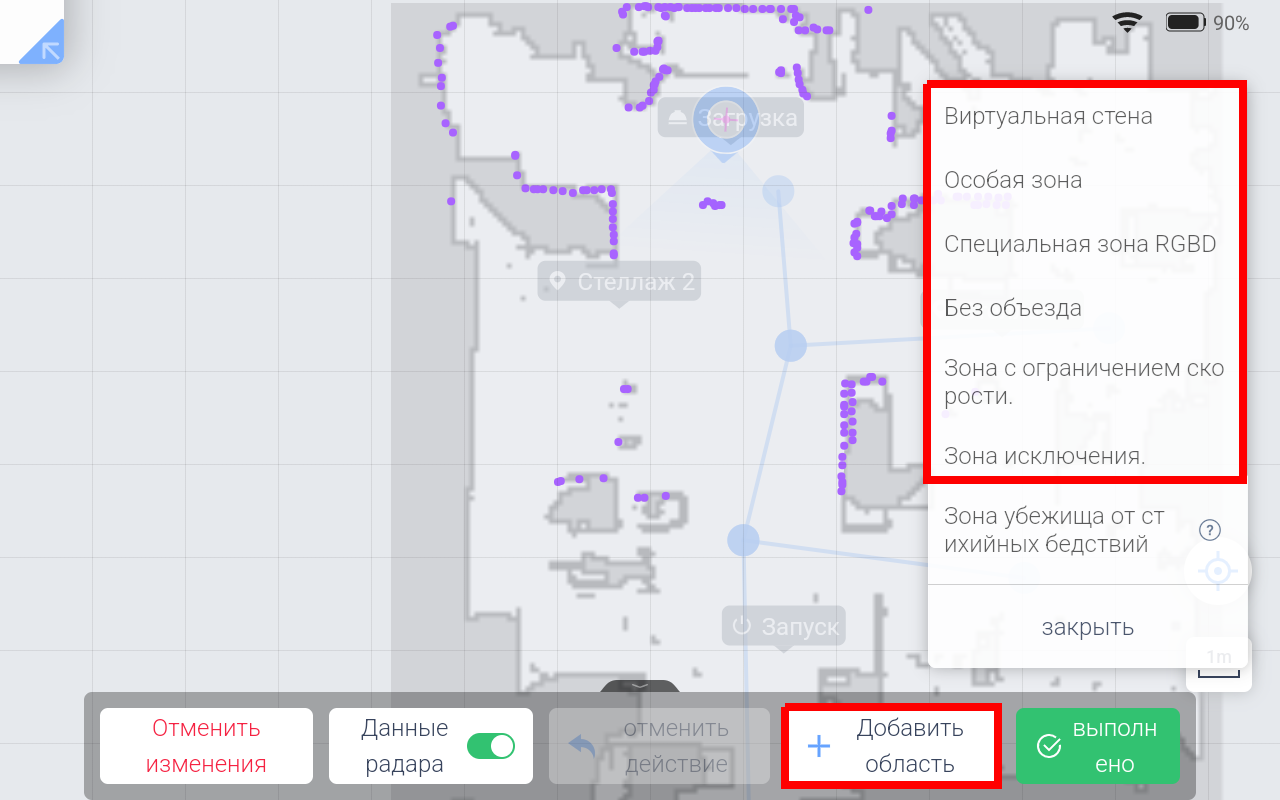 Виртуальная стена - на карте отмечается отрезок, который роботом будет воспринят как физическая стена, робот не будет пересекать эту линию.
Виртуальная стена - на карте отмечается отрезок, который роботом будет воспринят как физическая стена, робот не будет пересекать эту линию.
Особая зона - зона с измененным алгоритмом определения препятствий. Такой зоной следует отмечать места около лестниц и элеваторов, столешницы с большим вылетом и пороги.
Специальная зона RGBD - специализированная особая зона, в которой робот не будет реагировать на препятсвия с помощью RGBD камер спереди и сбоку, а полагаться только на LiDAR.
Без объезда - область на карте, определяющая поведение робота, в случае возникновения препятсвия при движении от точки к точке по топологическому маршруту робот будет сам ожидать, пока путь не освободится и не будет пытаться перестроить путь для объезда препятсвия на пути.
Зона с ограничением скорости - это область, при въезде в которую робот автоматически снижает свою скорость до заданного значения.
Зона исключения - это область в виде замкнутой фигуры из виртуальных стен, которая исключает въезд по периметру.
После разметки и сохранения карты она становится доступна для создания задач и выполнения базовых операций.
Постредактирование
После создания карты ее можно свободно в любой момент отредактировать: расширить, скопировать. Однако нельзя никак изменить метод локализации и изменить тип карты под многоэтажную.
Важно: Восстановите локализацию на карте, которую хотите изменить для того, чтобы не испортить карту.
Для перехода в меню редактирования карт перейдите в [Настройки] с главного экрана приложения робота 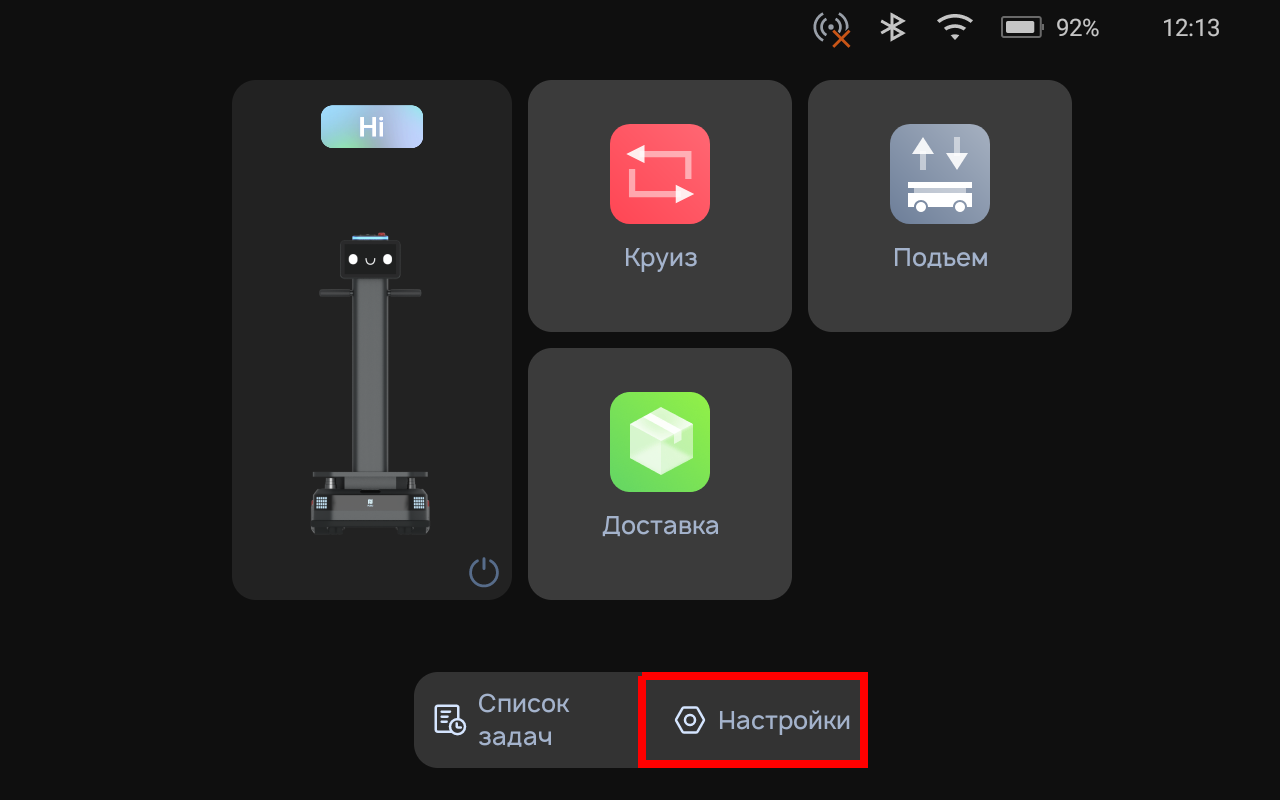 Перейдите во вкладку [Настройки карты] и переключите карту, на которой планируется внесение изменений.
Перейдите во вкладку [Настройки карты] и переключите карту, на которой планируется внесение изменений.  Для перехода к редактированию зайдите в [Редактировать карту]
Для перехода к редактированию зайдите в [Редактировать карту]  Вход в данное меню требует пароль суперпользователя. Или пароль отладки pudupw
Вход в данное меню требует пароль суперпользователя. Или пароль отладки pudupw
Для перехода в редактирование карты и точек используйте инструмент, выделенный зеленым цветом. 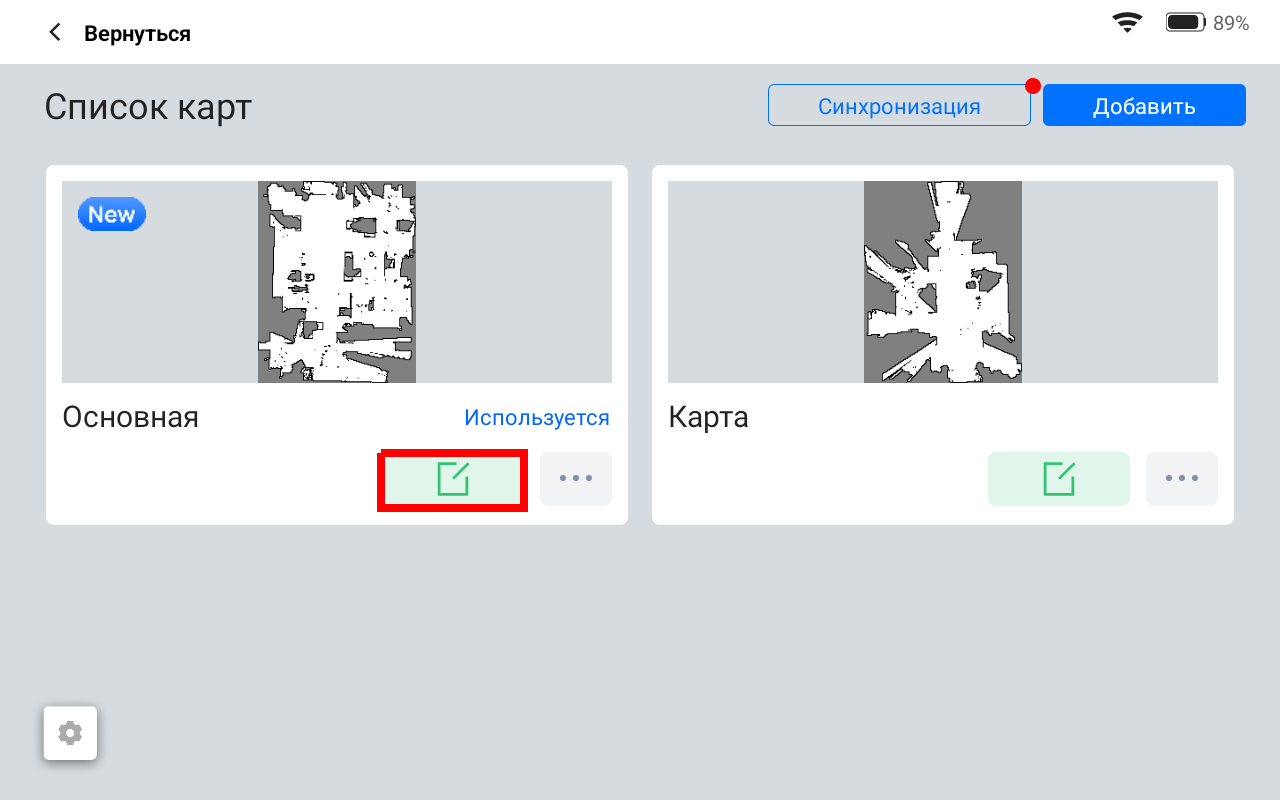 Нажмите на три точки для вызова дополнительных настроек, например расширение карты
Нажмите на три точки для вызова дополнительных настроек, например расширение карты 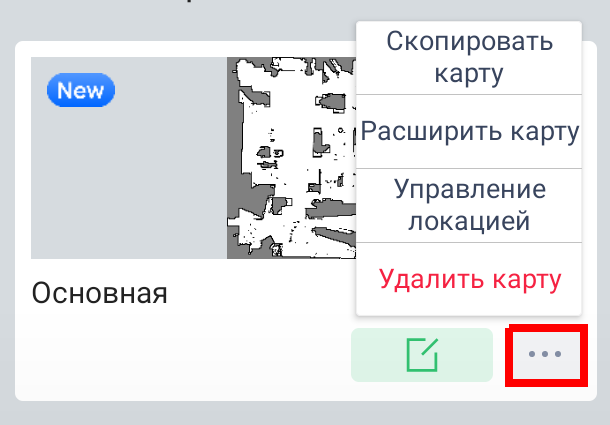
Некоторые операции над картой могут требовать пароль pudupw