Будет дополнено после выпуска робота
Начало работы
Аккумулятор робота для безопасности может быть переведет в режим транспортировки для исключения произвольного запуска в роботе.
Светодиоды аккумулятора при попытке активировать его будут перемигивать желтым цветом. Для вывода аккумулятора требуется разово подключить его к зарядному устройству.
Запуск робота
Вставьте аккумулятор в отсек под левой рукой робота.
Подняв левую руку ориентируйте и совместите угол склона корпуса аккумулятора и уклон торса. Затолкните аккумулятор с небольшого рывка, в результате защелки полностью раздвинутся и аккумулятор зафиксируется в отсеке робота.
Запустите аккумулятор робота двойным нажатием - быстро кликните один раз, после удерживайте более 3 секунд. Светодиод перемаргнет и будет постоянно гореть отображая уровень заряда зеленым цветом.
Для выключения зажмите кнопку включения на аккумуляторе на 5 секунд. Обратите внимание на светодиод в треугольнике на грудной пластине робота, который отображает текущий статус загрузки.
Пульсирующий бирюзовый - загрузка
Фиолетовый - без тока на моторах (Zero Torque)
Оранжевый - режим Damping
Белый - режим бега
Темно-синий - режим устойчивой позы
Красный - критические ошибки, проверьте приложение
Желтый - режим отладки/разработки(отключен базовый сервис походки)
Запуск на полу
Робот R1 инициирует калибровку при включении, поэтому перед включением робота
- Расположите лицом вверх горизонтально.

- Запустите аккумулятор
- Во время загрузки робот повернет голову и светодиод загорится фиолетовым цветом - робот загрузился.
- Включите пульт R3-1 двойным нажатием, по аналогии с включением робота.
- Вызовите команду L2 + ВВЕРХ, чтобы напрячь моторы робота.
- Зажмите комбинацию L2 + X (4 секунды) и робот автоматически поднимится из положения лежа в устойчивое положение стоя.
- Для того, чтобы перевести робота в режим ходьбы/бега нажмите R2 + A.
Привязка в приложении
Мобильное приложение Unitree Explore необходимо для настройки и контроля сервисов, калибровки и диагностики гуманойдных роботов. Для всех роботов первоначально требуется обязательная регистрастрация в облаке Unitree для нормальной работы: она производится через это приложение Отсканируйте соответствующие QR-коды ниже или перейдите по прямым ссылкам под ними
 |  |
| Android | iOS(Testflight) |
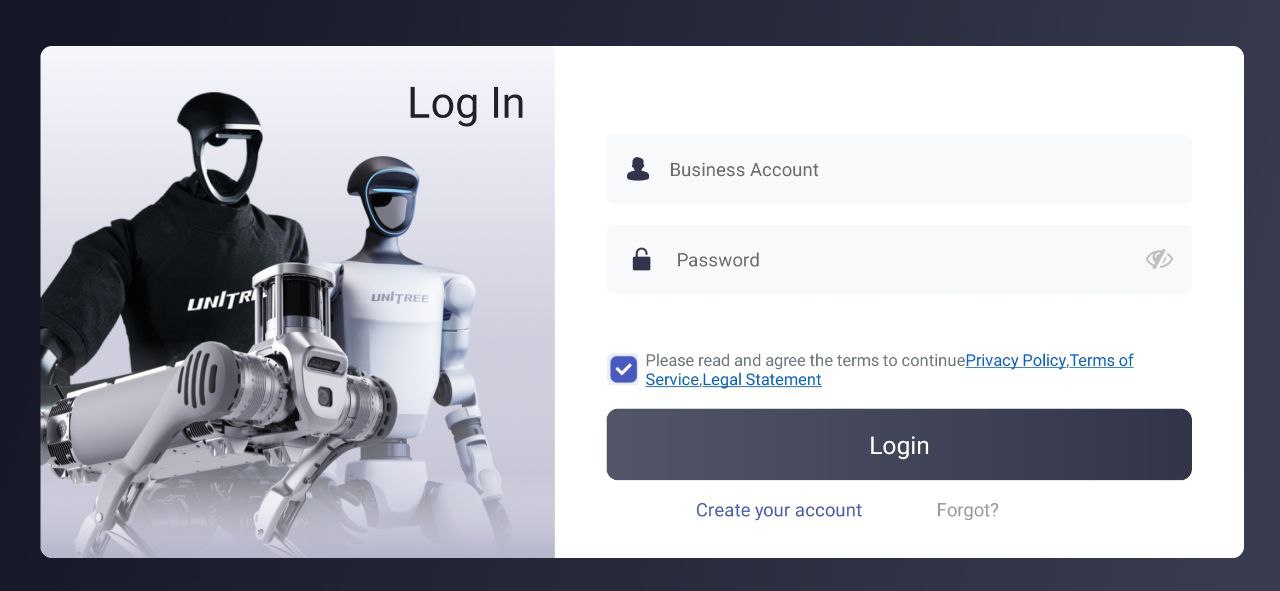
После этого зайдите в приложение создайте свой аккаунт для привязки робота. Поставьте галочку напротив текста: please review and agree the Privacy Policy, the Terms of Service and the Legal Statement, и нажмите Sign up.
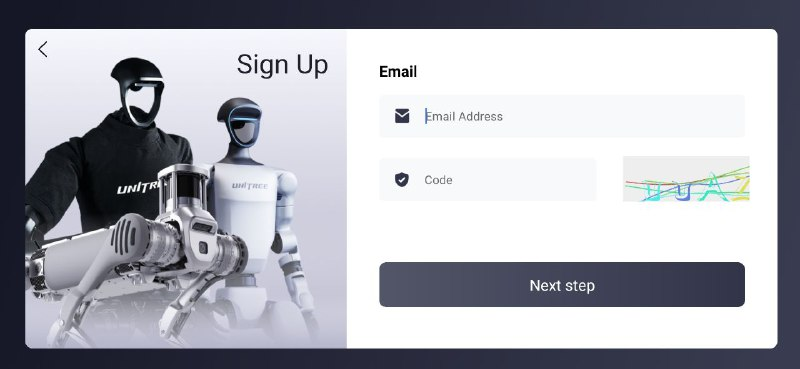
Введите ваш email и код с картинки.
Рекомендуем не использовать доменные и корпоративные почтовые адреса и при создании аккаунта отдать предпочтение почтовым ящикам @gmail.com.
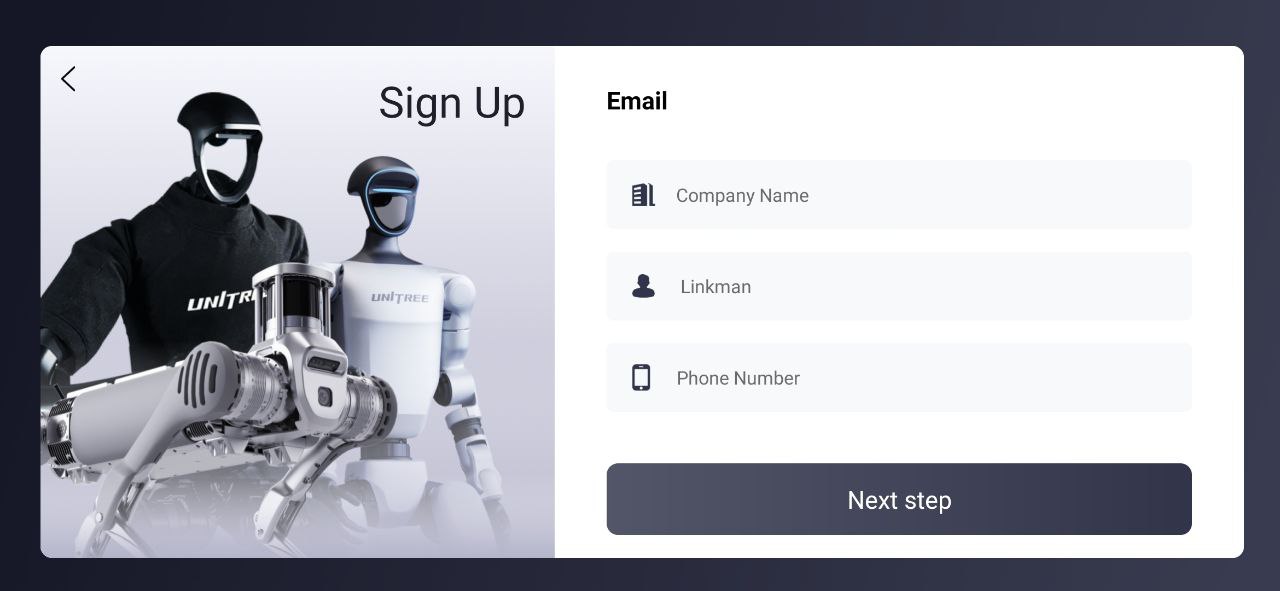
Укажите контактные данные компании.
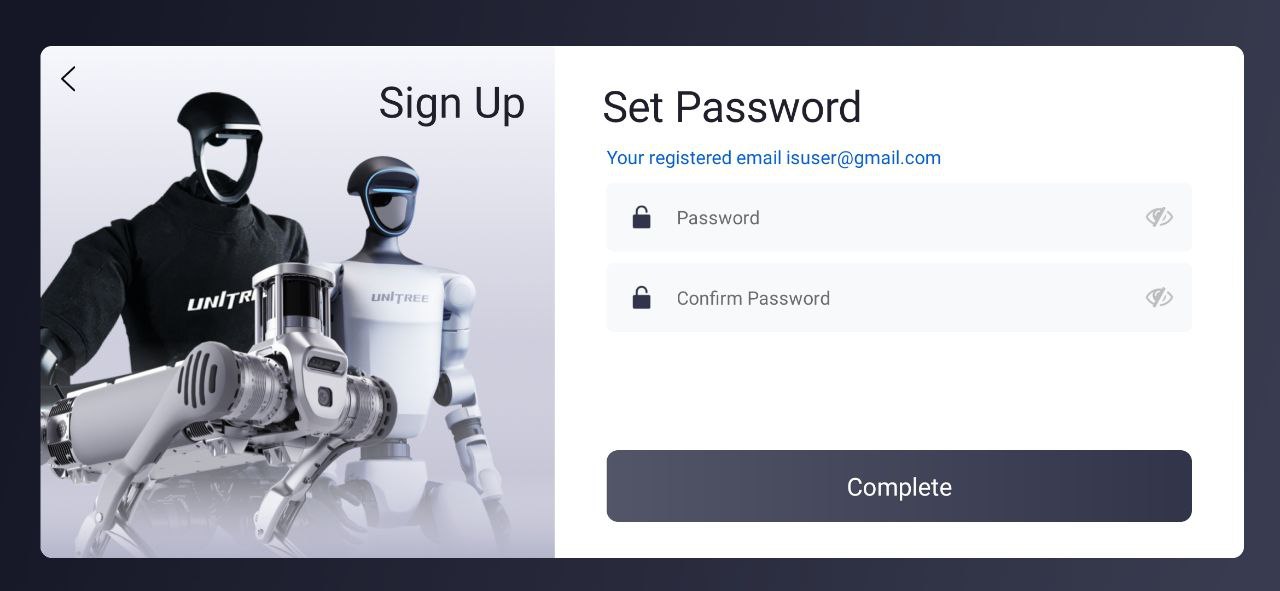
Установите пароль для аккаунта на латинице
Войдите в Ваш аккаунт и нажмите Add robot. Выберите вашего R1.
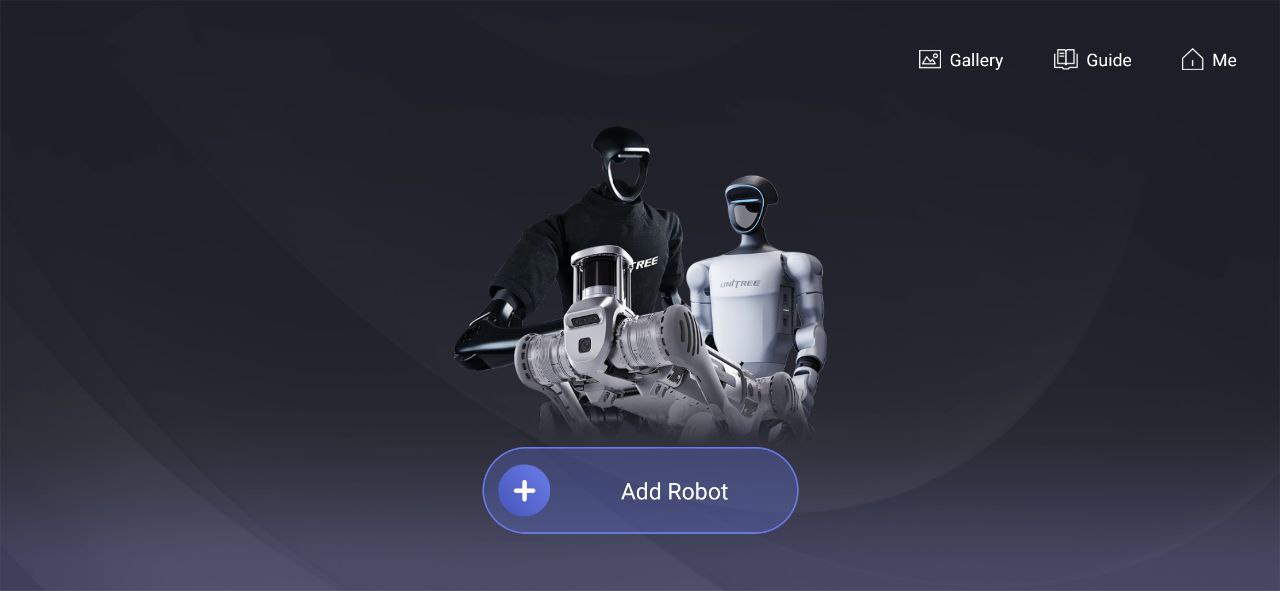
И режим подключения к роботу. Режим Wi-Fi предпочтителен.
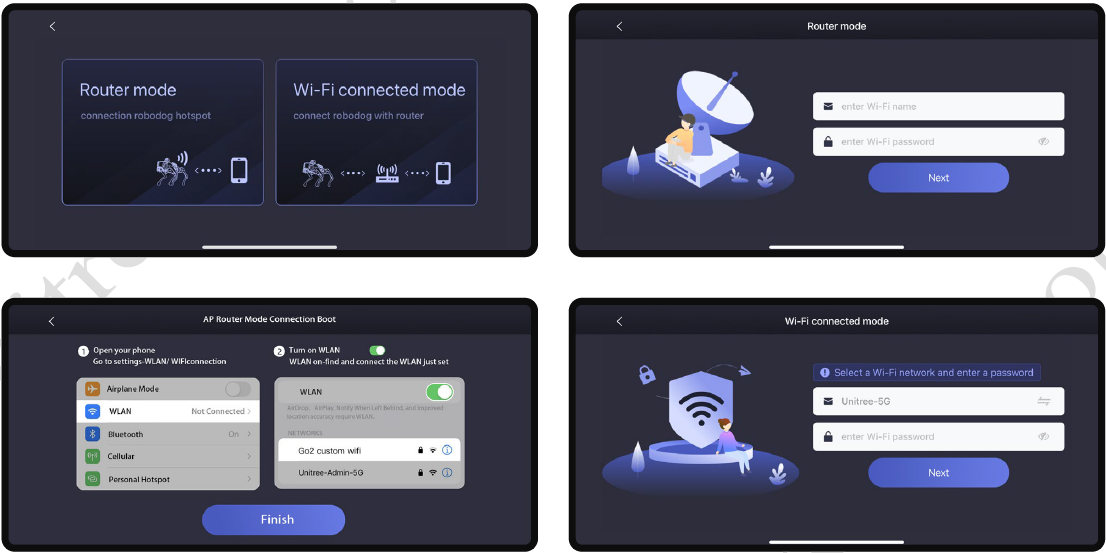
Приложение используя Bluetooth передаст роботу указанные данные, и робот будет передавать свой уникальный идентификатор в облако Unitree, чтобы привязаться к аккаунту. Если все прошло хорошо, то робот будет привязан к аккаунту.
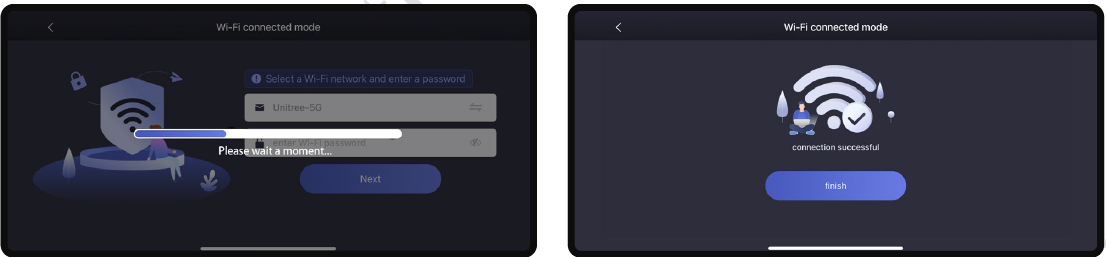
При невозможности подключения к Wi-Fi используйте AP mode. Проблема с регистрацией робота в облаке в нашем регионе может возникать на сетях Интернет.
Привязка пульта
- В приложении перейдите в раздел [Device]-[Data]-[Remote Control]
- Найдите на пульте стикер с кодом
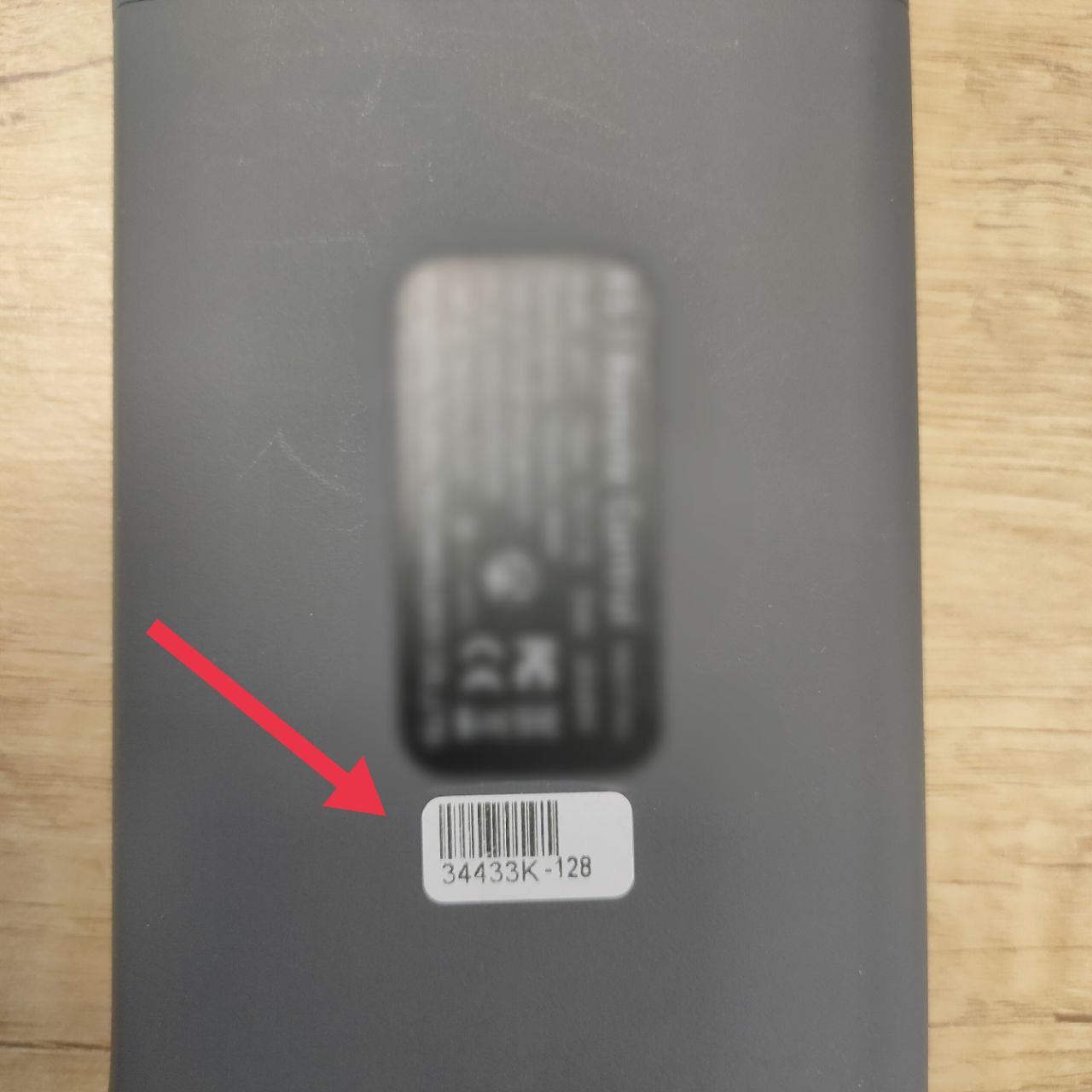
- Введите в поле binding код со стикера до тире (например: 34433К)

- Проверьте успешность привязки выполнив любую команду, перезапуск пульта не требуется.
Разметка кнопок
| Основные действия | Комбинация | Примечание к комбинации |
|---|---|---|
| Zero Torque(Снятие напряжения с моторов) | L2 + Y | Удерживать 4 секунды |
| Damping(Снятие нагрузки с моторов) | L2 + B | Удерживать 4 секунды |
| Locked Standing(Установка моторов в начальное положение без удержания равновесия) | L2 + ВВЕРХ | Удерживать 2 секунды |
| Lie<->Stand(Подъем с земли и опускание) | L2 + X | Короткое нажатие, требуется пространство вокруг |
| Seated Mode(Приседание) | L2 + ВЛЕВО | Удерживать 2 секунды, тр |
| Runnaing Mode(Режим ходьбы/бега) | R2 + A | Короткое нажатие, робот начинает держать баланс |
| Уменьшение скорости | R2 + ВНИЗ | Короткое нажатие |
| Увеличение скорости | R2 + ВВЕРХ | Короткое нажатие |
| Анимация и взаимодействие | ||
| Рукопожатие | SELECT + A | Короткое нажатие |
| Махание рукой | SELECT + Y | Короткое нажатие |
| Отказ | SELECT + X | Короткое нажатие |
| Махание рукой на уровне головы | Y + Y | Быстрое двойное нажатие |
| Воздушный поцелуй | X + X | Быстрое двойное нажатие |
| Хлопки руками | A + A | Быстрое двойное нажатие |
| Подъем правой руки | B + B | Быстрое двойное нажатие |
| Поднятие правой руки | ВПРАВО + ВПРАВО | Быстрое двойное нажатие |
| Поднятие левой руки | ВЛЕВО + ВЛЕВО | Быстрое двойное нажатие |
| Поднятие обоих рук | ВВЕРХ + ВВЕРХ | Быстрое двойное нажатие |
| Переключение писк/вибрация пульта ДУ | F1 + F1 | Быстро нажать |
| Отключение вибрации пульта | F3 + F3 + F3 | Быстро нажать |