Базовые операции и создание карты
Данная инструкция включает основные действия, которые необходимо совершить для первого запуска на точке.
Активация продукта
При покупке пользователь получает неактивированного робота. Активация необходима для возможности сохранения карт, т.е. для работы. Для активации робота передайте следующие данные при обращении в поддержку:
-
Серийный номер робота, проще всего его найти на этикетке продукта с коробки (Обычно начинается на Q***, находится на коробке, в документах к роботу и на самом роботе)
-
Контактное лицо администратора облачного аккаунта
-
Почтовый ящик администратора
-
Предположительная локация использования (Воронежская область г. Воронеж)
Если необходимо создать ассисента, пожалуйста, перейдайте дополнительный почтовый ящик для регистрации связанного аккаунта.
Проверьте, на указанный ящик должны поступить данные для входа в аккаунт облачного сервиса Keenon
Базовая предподготовка
Первоначальные настройки необходимы, чтобы привести робота в состояние готовое к работе. Пожалуйста, выполните действия из инструкции по обновлению, прежде чем приступать к следующим шагам.
Подключение к сети
Робот может работать будучи не подключенным к сети, однако для настройки требуется доступ к сети Интернет.
Подключение к Датацентру
Для загрузки/синхронизации карт, а также использования сервисов, связанных с облачным взаимодействием, у робота должен быть правильно указан. Следуйте инструкции:
Установка кирилицы для ввода
В базовых настройках робота кирилица отсутствует в возможности ввода. Для названия точек, карт и придания органичности русского интерфейса с русскими названиями точек следуйте инструкции:
Коррекция часового пояса
Коррекция часового пояса требуется для работы по расписанию в соотвествии с местным временем.
Следующие настройки настройки необходимы, чтобы применить синхронизацию времени:
Создание карты
В инструменте Robot Installation Assistant создают и редактируются карты, зоны, а так же устанавливаются специальные правила (например для работы нескольких роботов Keenon на одной карте) и глобальные правила ( и маршруты.
Находясь в меню приложения для постройки карт убедитесь, что вы подключены к WiFi или робот снабжен SIM картой для передачи трафика с доступом в Интернет, так как созданную карту необходимо будет загрузить в облако Keenon. Итак, для создания карты рекомендуем следовать порядку и рекомендациям обозначенным в дальнейших шагах:
- Нажмите [+New] в левом верхнем углу экрана
- Введите имя для сцены. Сцена - это набор особых правил и карт, включая различные этажи или крылья здания.
- Вас не переместит сразу к созданию карт, только что созданная сцена будет в списке ваших карт, если такие уже имеются. Найдите ее, она получит флаг In use как на изображении ниже Моя карта
- Нажмите дважды на плитку с названием вашей сцены, чтобы перейти к процессу построения
- В меню создания карты перейдите в меню привязки к этажам нажав на знак многоэтажного здания в верхнем левом углу
 Обязательно создавайте привязку даже в одноэтажных сценариях использования робота.
Обязательно создавайте привязку даже в одноэтажных сценариях использования робота. - Нажмите [New floor] в верхнем правом углу
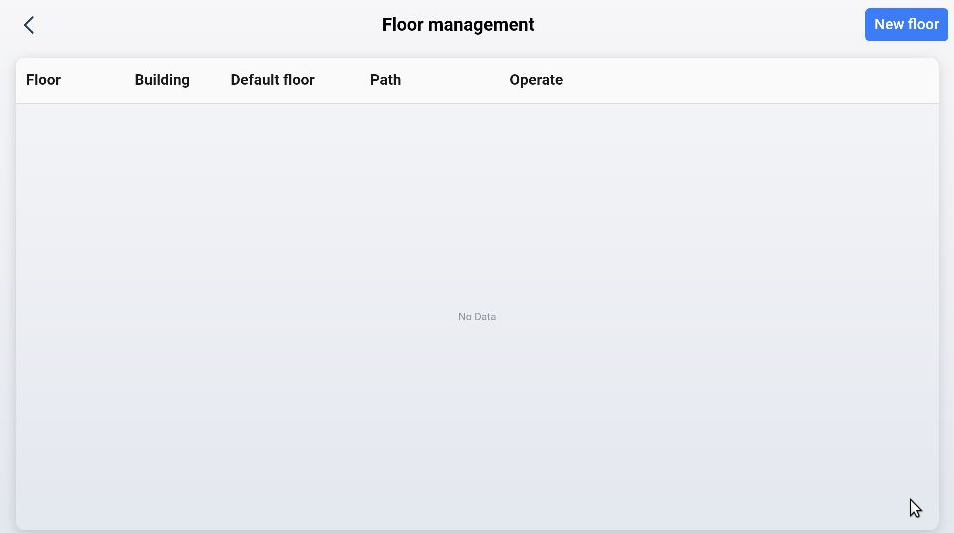
- Введите номер этажа в первое поле, название этажа не обязательно.
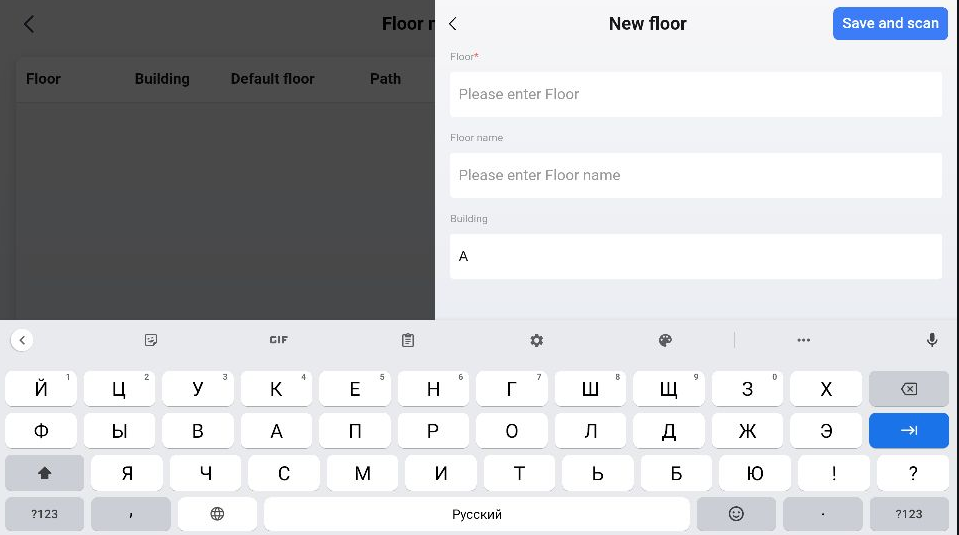
Обязательно указывайте правильный номер этажа в соотвествии с лифтом, если робот должен будет автоматически перемещаться по этажам здания используя лифт
После нажатия [Save and scan] для сохранения информации вы перейдете к первому этапу построения карты - отрисовка.
Этап 1. Отрисовка
На этапе необходимо отрисовать карту территории. Каждый этап будет воспроизводить видеоинструкцию, которая коротко объясняет и демонстрирует, что будет необходимо сделать на данном этапе
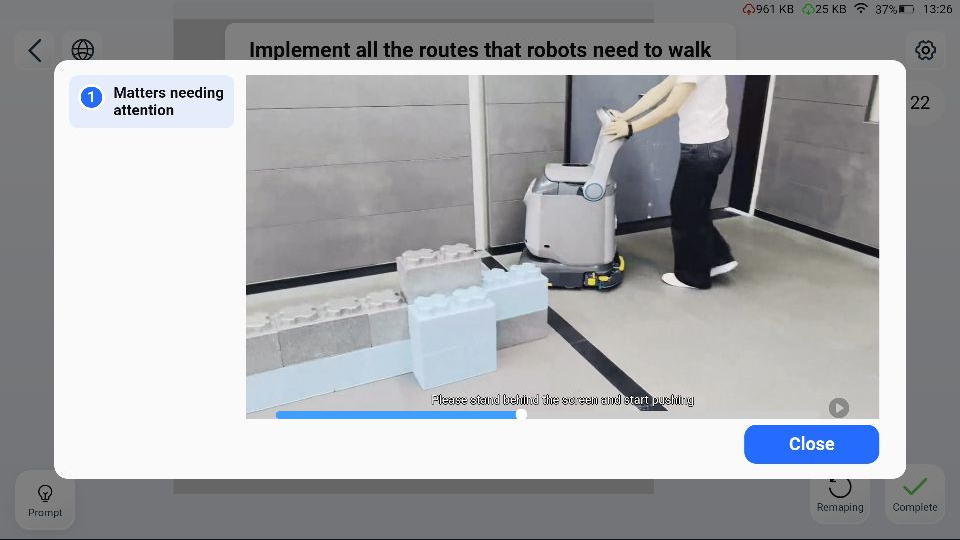
Рекомендуем не использовать навесное чистящее оборудование(щетки, скребки, валики) на данном этапе построения карты.От скорости перемещения робота будет зависеть точность построенной карты, в случае, если перемещение робота будет осуществляться на высокой для построения карты скорости, то он оповестит вас голосовым сообщением.
Для создания корректной карты робота нужно толкать (не тянуть), во время построения нельзя допускать пробуксовки и отрыва колес от земли. Если такое произошло, процесс создания карты нужно начинать сначала нажав [Remaping].
- Поднимите экран робота, чтобы превратить его в ручку
- Отожмите кнопку аварийной остановки и начинайте неспешно толкать робота по территории.
- После полного обхода территории нажмите [Complete]
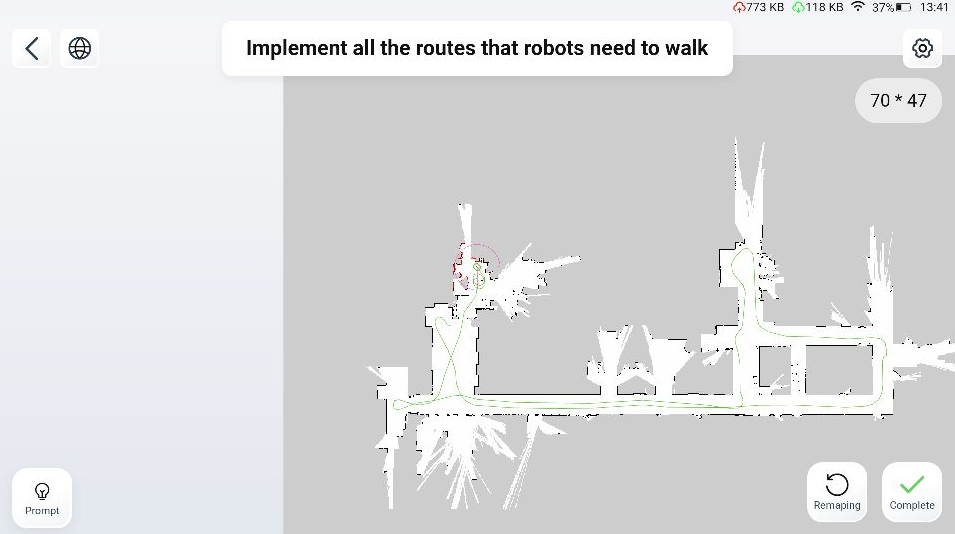
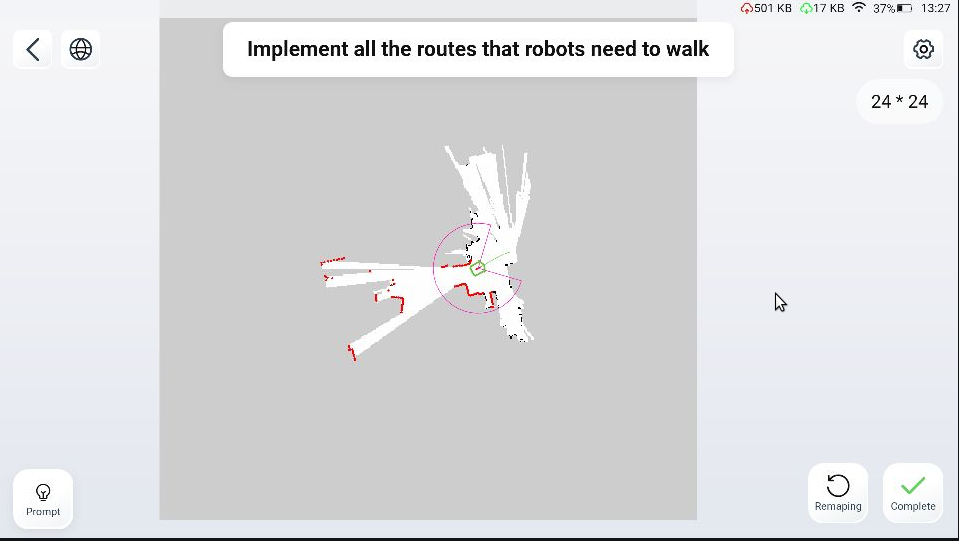
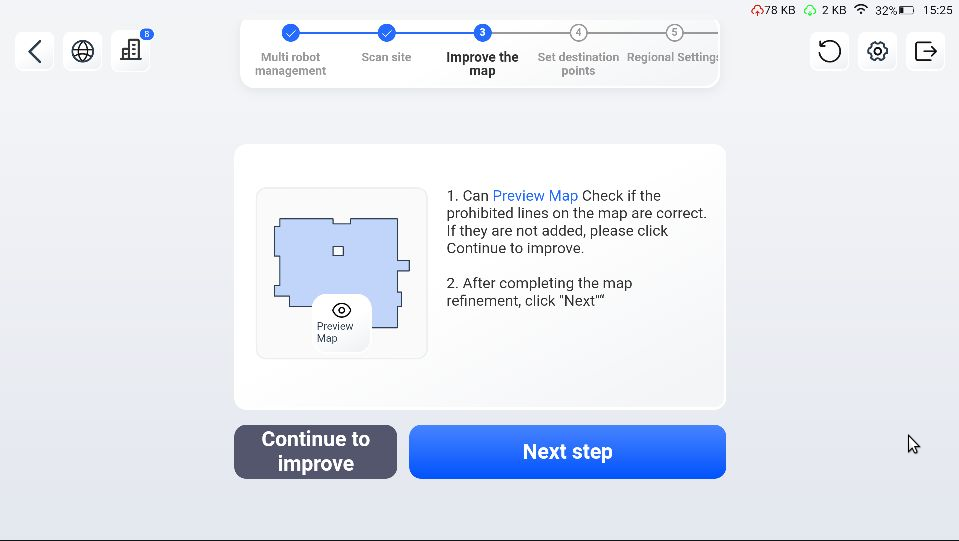
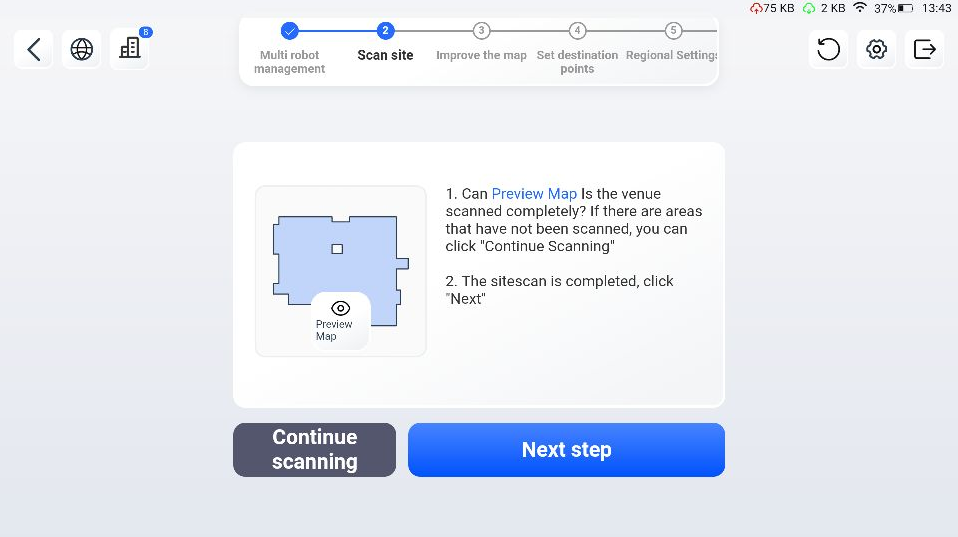 В меню каждого этапа можно просмотреть полученную карту, для этого нажмите [Preview Map], в этом режиме робот не будет пересканировать территорию, а сама карта будет недоступна для редактирования
В меню каждого этапа можно просмотреть полученную карту, для этого нажмите [Preview Map], в этом режиме робот не будет пересканировать территорию, а сама карта будет недоступна для редактирования 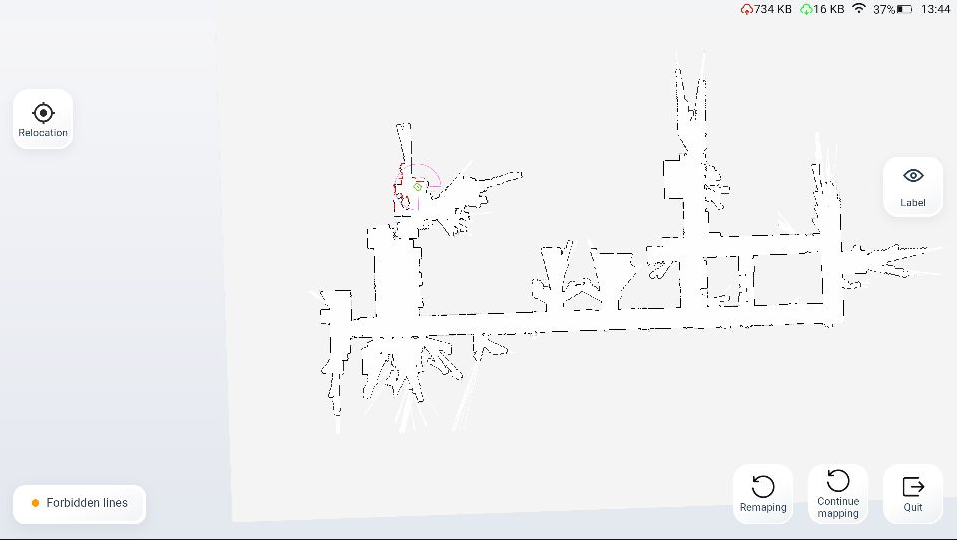 В этом же меню так же можно продолжить сканирование, для этого нажмите [Continue scanning]. Этот позволит достроить или перестроить определнные участки карты.
В этом же меню так же можно продолжить сканирование, для этого нажмите [Continue scanning]. Этот позволит достроить или перестроить определнные участки карты. - Для перехода к следующему этапу нажмите [Next step]
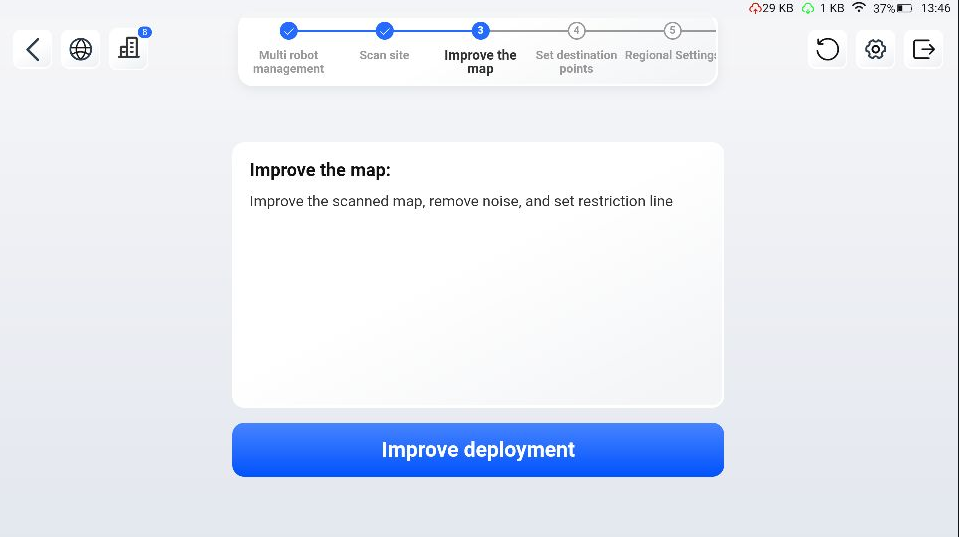
Этап 2. Улучшение карты
Этап улучшения карты заключается в очистке аномалий сканирования, ошибочно воспринятые препятствия и динамичные объекты, которые могут пропасть из зоны, чтобы эта территория была включена в сгенерированный маршрут уборки площади.
Этап улучшения представлен инструментами Ластик, Специальные зоны и Ограничительные линии
Ластик
- Для перехода к инструментам улучшения карты нажмите [Improve deployment]
- Нажмите [Eraser] для входа в инструмент Ластик
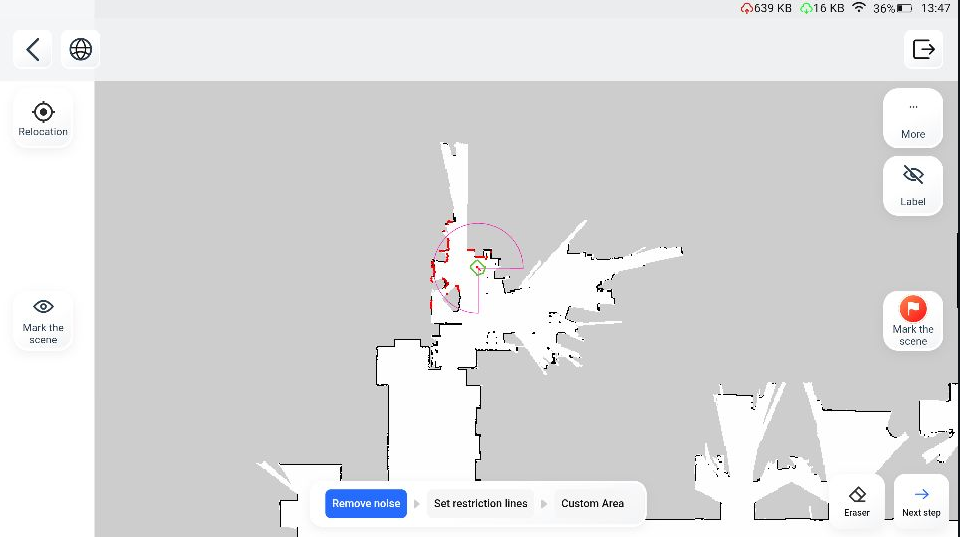
- Стирайте ошибочно отсканированные объекты и препятствия, программа так же выделит очевидные артефакты сканирования и обведет их в красный квадрат
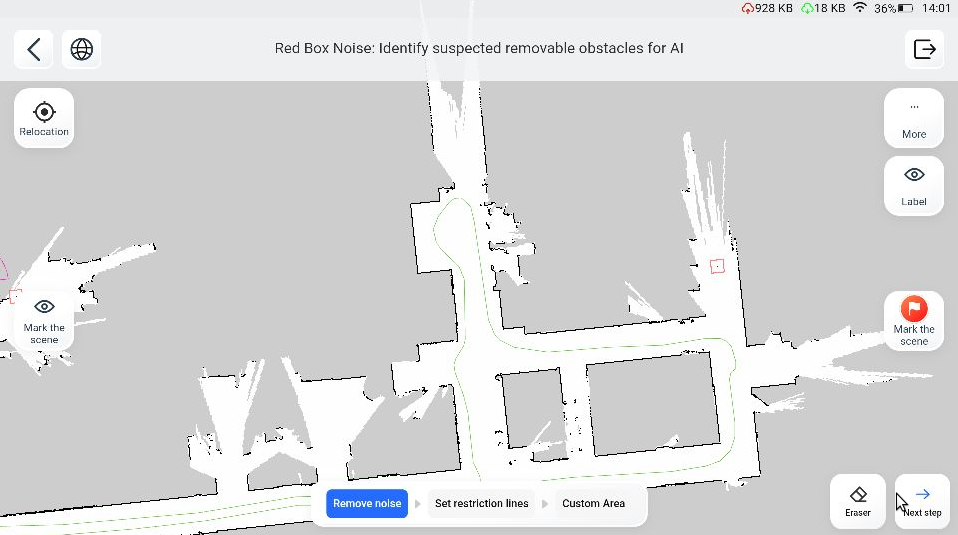 В нижнем части можно настроить размер и тип Ластика, отменить свои действия, если было удаленно лишнее.
В нижнем части можно настроить размер и тип Ластика, отменить свои действия, если было удаленно лишнее. 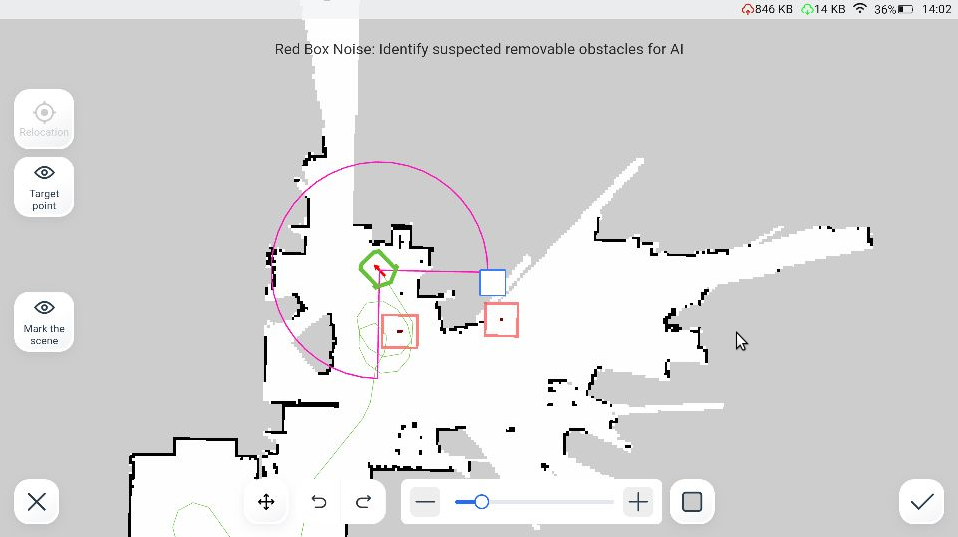 Для перехода в режим перемещения нажмите на соотвествующий символ. В этом состоянии (СИНИЙ) взаимодействие с экраном приводит только к перемещению, для удаления препятсвий отключите его (БЕЛЫЙ).
Для перехода в режим перемещения нажмите на соотвествующий символ. В этом состоянии (СИНИЙ) взаимодействие с экраном приводит только к перемещению, для удаления препятсвий отключите его (БЕЛЫЙ). 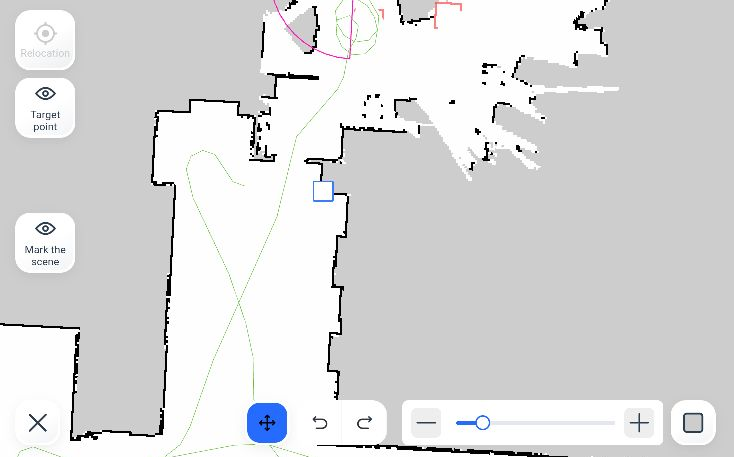
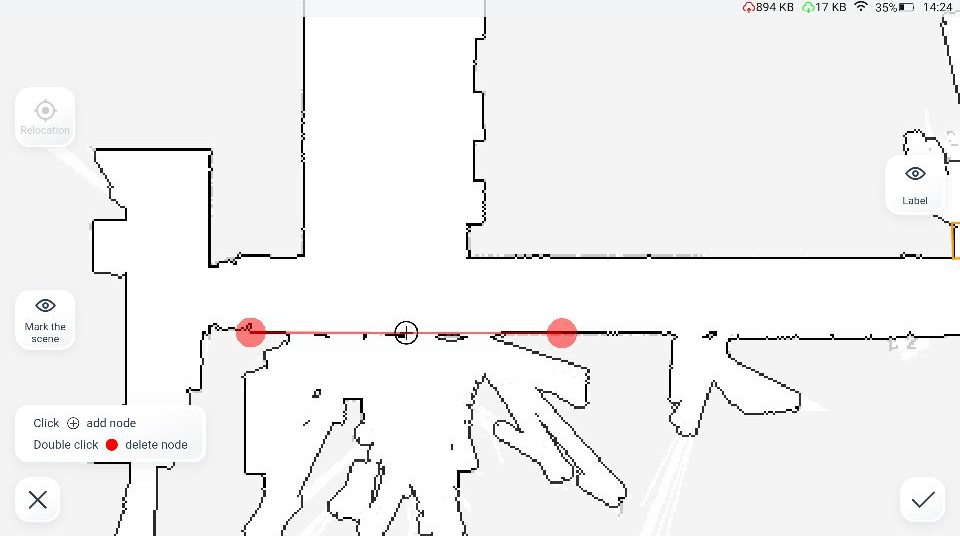
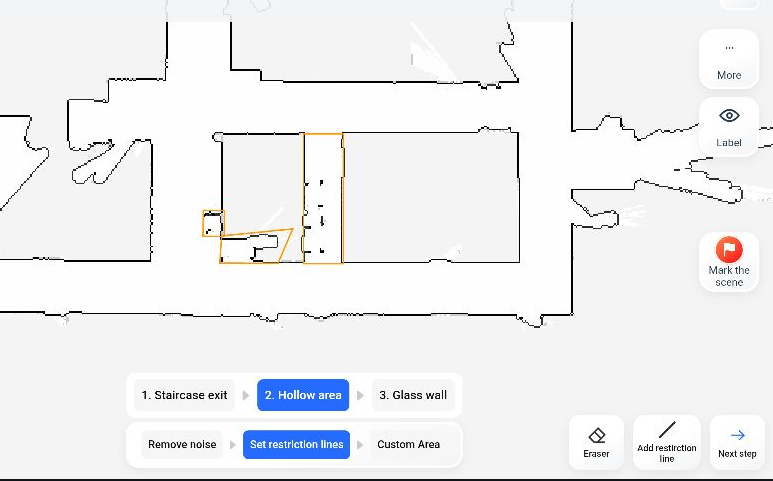
Ограничительные линии
В режиме [Set restriction lines] размечаются [Staircase exit], [Hollow area], [Glass wall]. Целевой разницы между этими зонами нет, так как они ограничивают перещение в зоне, не исключая участки карты из навигации, создавая виртуальные стены на карте.
- Нажмите на инструмент [Add restriction line] можно выбрать форму и тип ограничительных линий
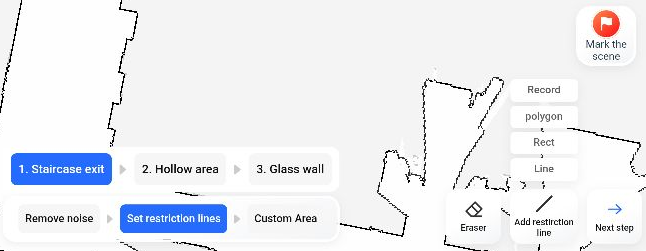
- Для размещения фигуры вращайте карту и саму фигуру/линии устанавливая ей правильную форму и положение
 Результат: Пороги или полости в половом покрытии рекомендуется отделять только объемными фигурами используя [Staircase exit] для перекрытия зон возможного проезда робота
Результат: Пороги или полости в половом покрытии рекомендуется отделять только объемными фигурами используя [Staircase exit] для перекрытия зон возможного проезда робота 
- Используйте [Glass wall] для разметки стеклянных стен
- Используйте [Hollow area] для разметки нависающих объектов ниже 75 сантиметров (столешницы, барные стойки)
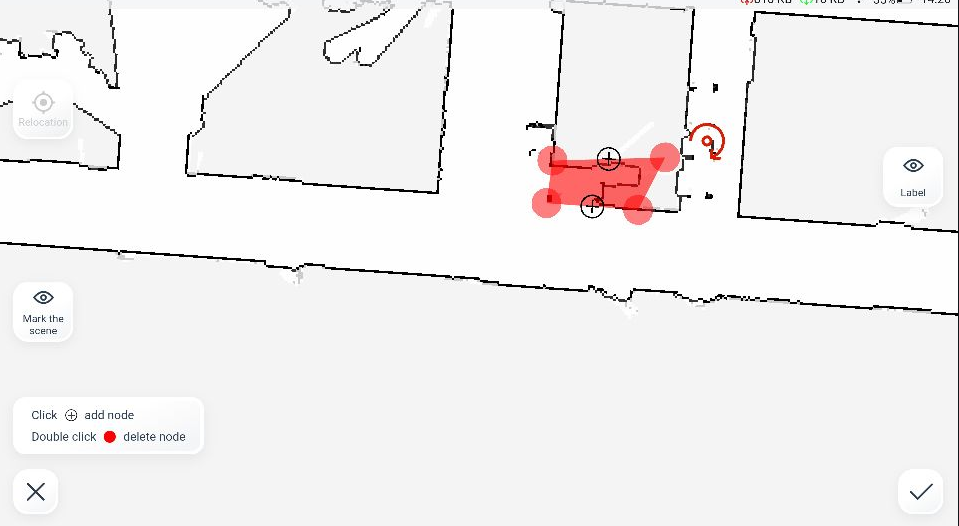 Такие объекты робот может распознать как доступную к проезду территорию, чтобы не нарушать карту их нужно отделять описанными выше ограничивающими зонами.
Такие объекты робот может распознать как доступную к проезду территорию, чтобы не нарушать карту их нужно отделять описанными выше ограничивающими зонами. 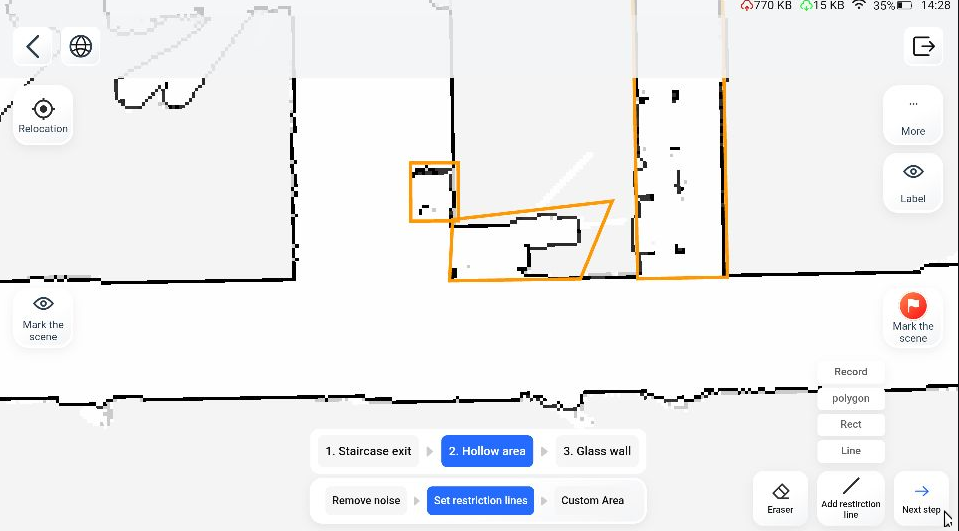
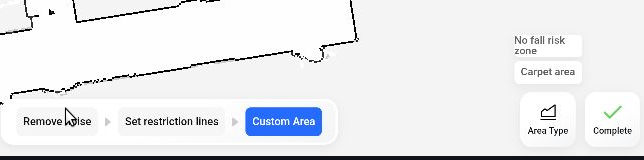
Специальные зоны
В режиме [Custom Area] размечаются специальные зоны, такие как зона ковров [Carpet Area] и зона без риска падения [No fall risk zone].
Просьба не размещать зону [No fall risk zone] на вашей карте, данная функция не поддерживается и может повредить текущую карту.
Зона ковров нужна для особых правил генерации маршрута на зонах пересечения твердых половых покрытий и ковровых покрытий.
Зона ковров не исключает возможность влажной уборки, рекомендуемый тип уборки как вариант по умолчанию устанавливается сухая уборка. Данная зона будет превентивно создана на этапе разметки регионов уборки.
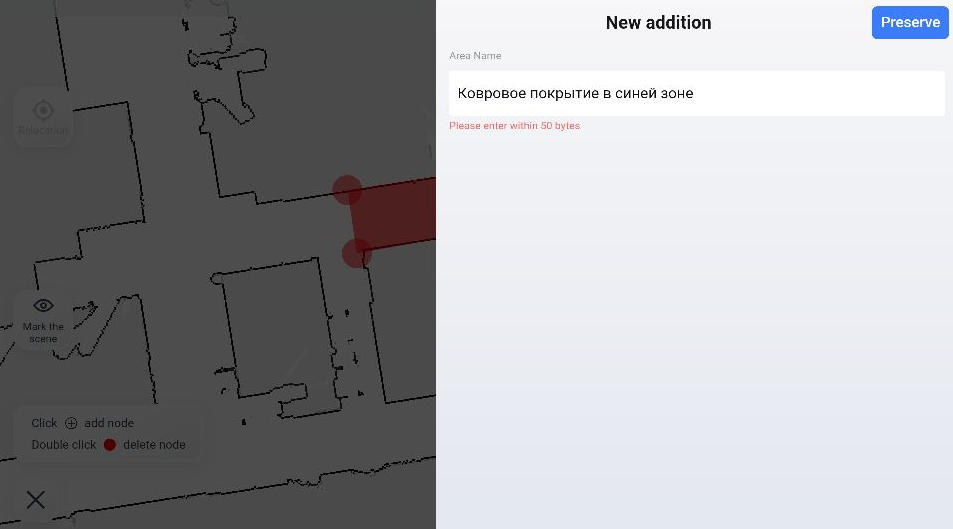
- Выберите инструмент [Carpet Area] нажав [Area Type] в правом нижнем углу
- Укажите фигуру, Зона создается правилом многоугольника, нажимайте на +, чтобы добавить вершину и установите зону на всю площадь ковра.
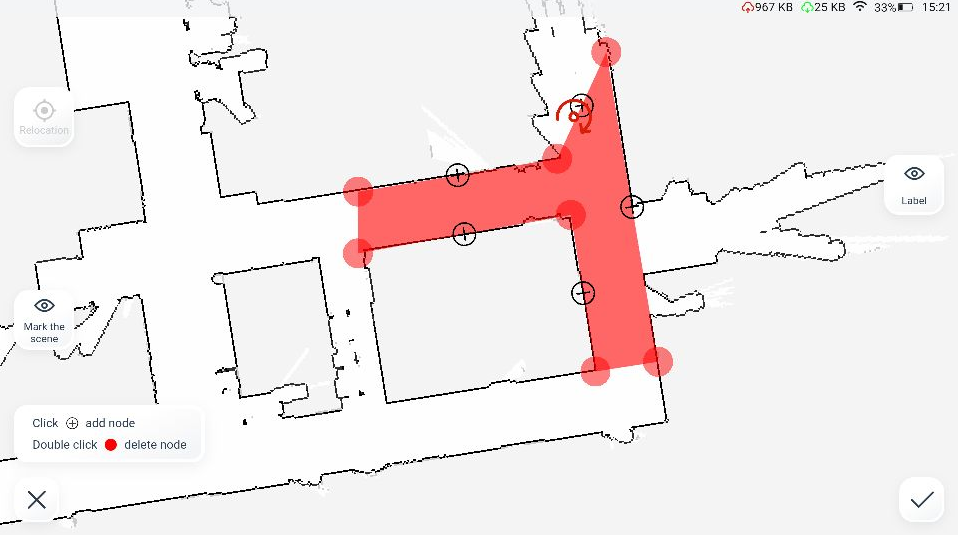
- Нажмите ✓ в нижнем правом углу и введите имя зоны для сохранения, и нажмите [Preserve]
После завершения данного этапа можно так же совершить предпросмотр нажав [Preview Map] или добавь недостающую разметку нажав [Continue to improve]
Для перехода к следующему этапу нажмите [Next step]
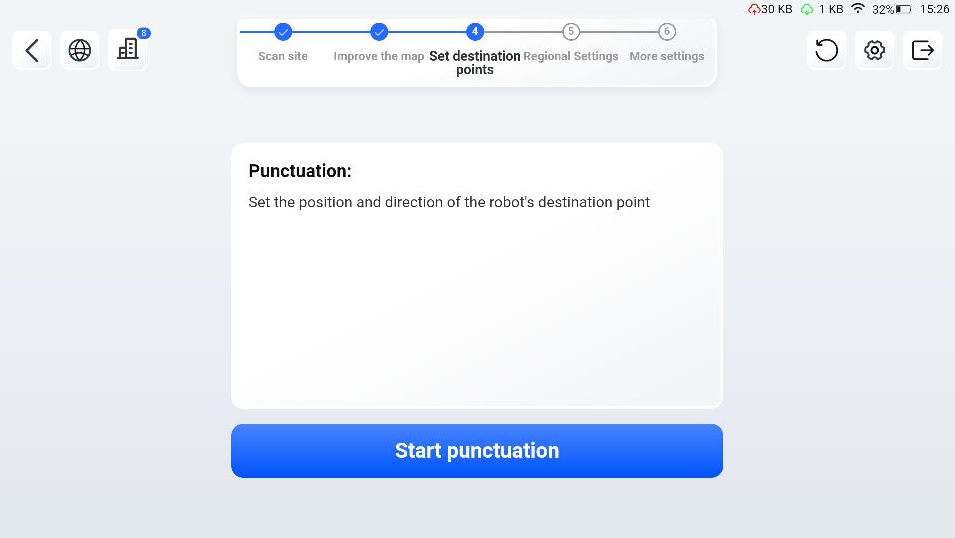
Этап 3. Разметка точек
Главная цель третьего - установка всех необходимых служебных точек для организации возможности уборки робота на территории
- Нажмите [Start punctuation], чтобы перейти в меню создания точек
- Используйте [Add] или [Manual add], однако отдайте рекомендацию первому методу
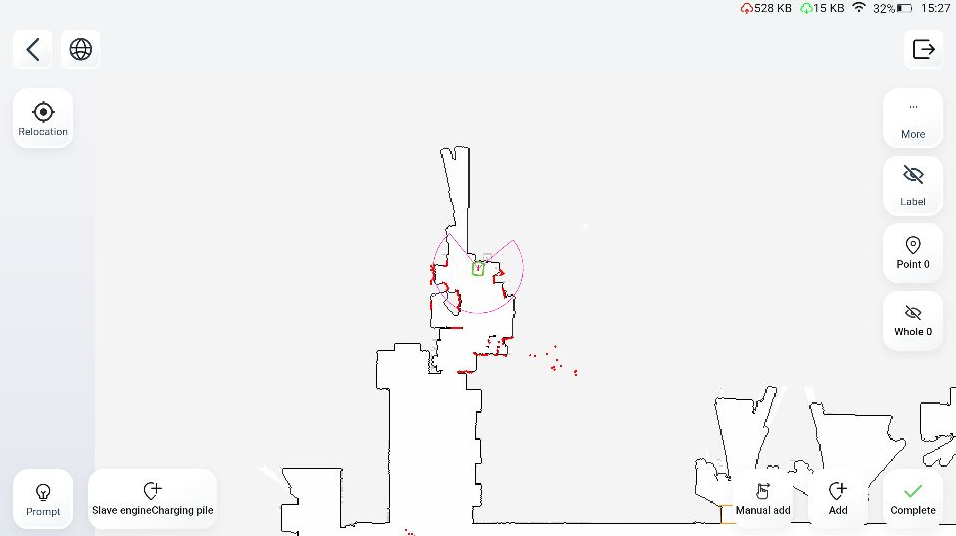 Метод Add требует установку робота в место, где будет установлена точка на карте, робот сам передает свою ориентацию и позицию; Метод Manual add не рекомендуется неопытным пользователям, требует установку и ориентирование вектора на карте самостоятельно;
Метод Add требует установку робота в место, где будет установлена точка на карте, робот сам передает свою ориентацию и позицию; Метод Manual add не рекомендуется неопытным пользователям, требует установку и ориентирование вектора на карте самостоятельно; - Нажимая Add в первой строке выбирается тип точки, а во второй точке устанавливается имя;
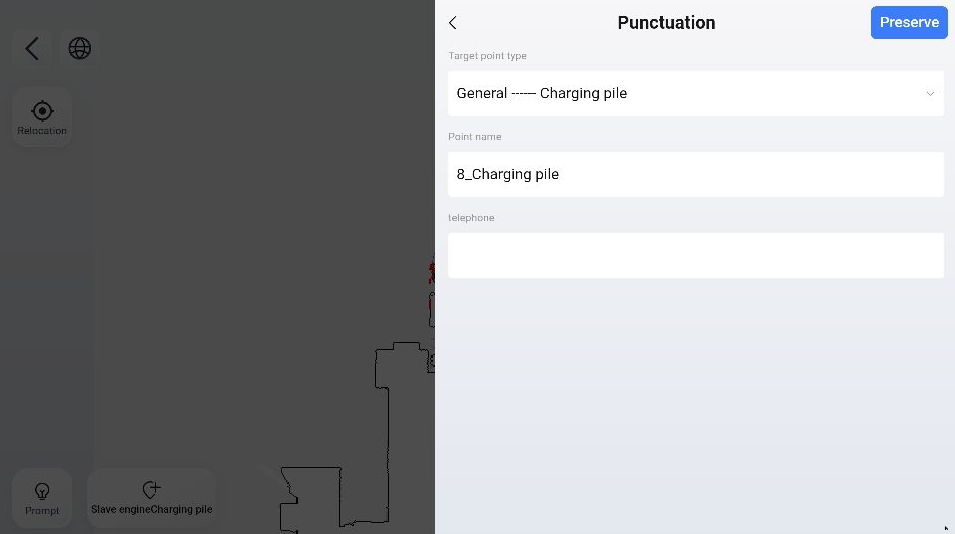
- Создайте точку General - Charging pile, это основная точка зарядной станции робота, она является обязательной точкой на карте;
- Для сохранения нажмите [Preserve],
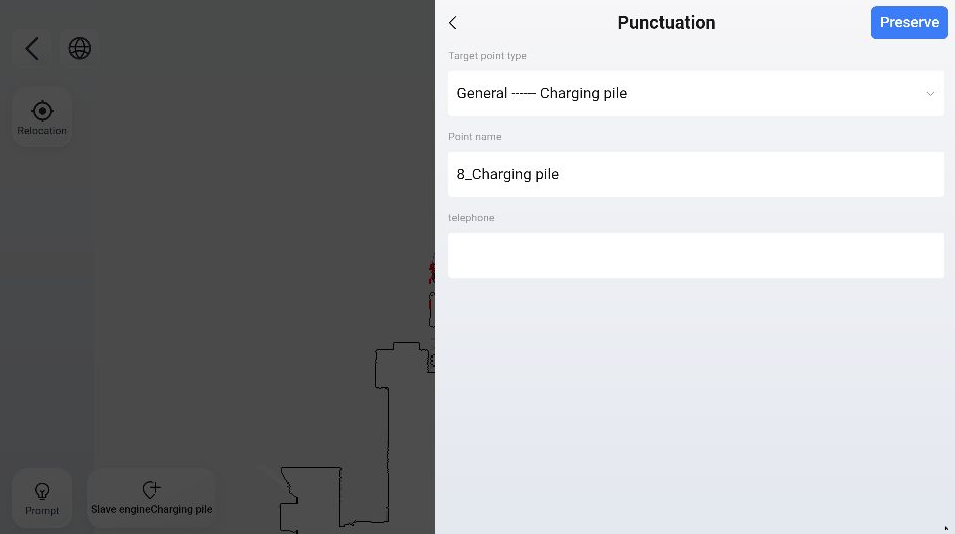
Точка зарядной станции создаст стрелку(ЗЕЛЕНАЯ) на небольшом отдалении, которая является точкой, с которой робот начинает сопоставление со станцией.
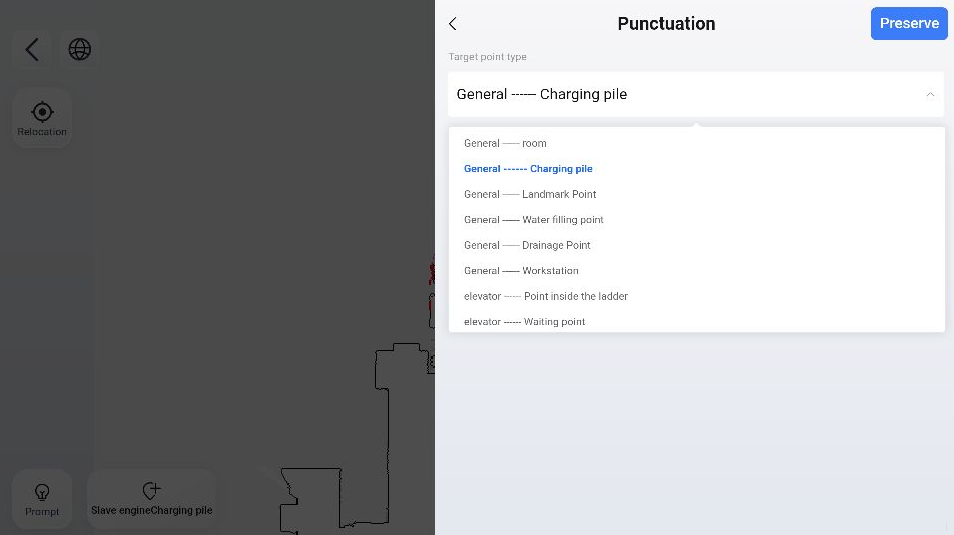
Типы точек
В меню точек можно найти все точки, которые используются для активации различных режимов, например автономного перемещения робота на лифте.
-
Charging pile: основаня зарядная станция
-
Landmark Point: точка ориентирования. Рекомендуется размещать такую точку в местах, где часто не изменяется планировка.
-
Water filling point: точка залива чистой воды. К этой точке робот подъезжает для запроса чистой воды при ее нехватке.
-
Drainage Point: точка слива грязной воды. К этой точке робот подъезжает для запроса слива грязной воды при заполнености бака.
-
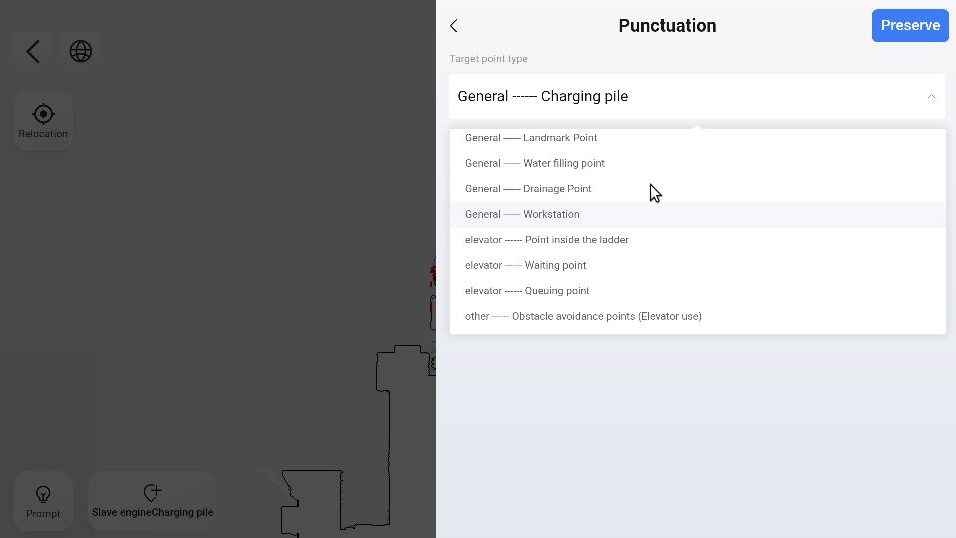
Workstation: точка станции слива/залива воды и зарядки. (Станция не входит в базовый комлект робота и является дополнительным покупным аксессуаром)
Для автоматизации функции рабочей станции Workstation требуется установка точек Water filling point, Drainage Point и точку основной зарядной станции Charging pile для использование станции в роли зарядной.
-
Point inside the ladder: точка внутри лифта, которую робот будет стараться занять при въезде в лифт
-
Waiting poing: точка ожидания в лифте (внутри лифта)
-
Queuing point: точка очереди ожидания лифта к этажу
Для завершения шага нажмите [Complete] для выхода из редактирования этапа разметки точек.
После завершения данного этапа можно так же совершить предпросмотр нажав [Preview Map] или добавь недостающую разметку нажав [Continue punctuation]
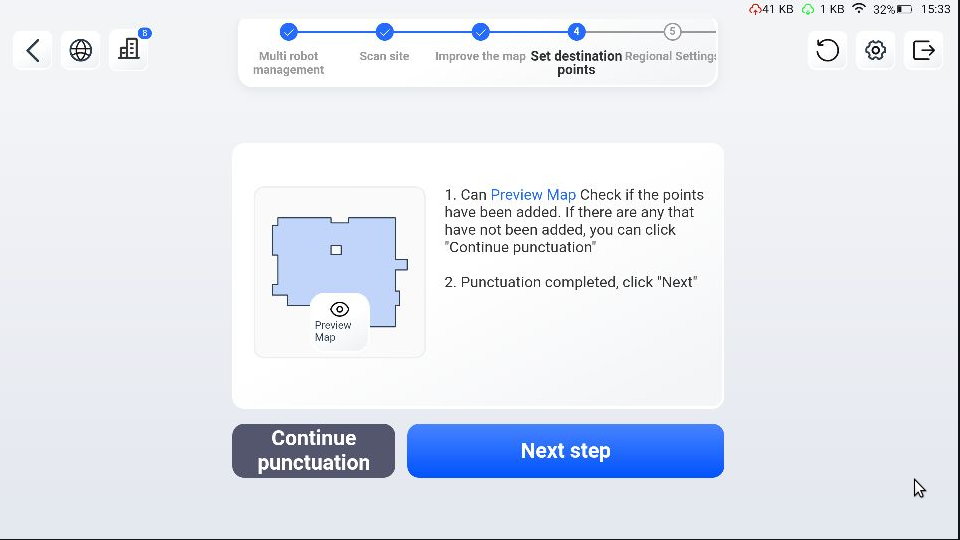
Для перехода к следующему этапу нажмите [Next step]
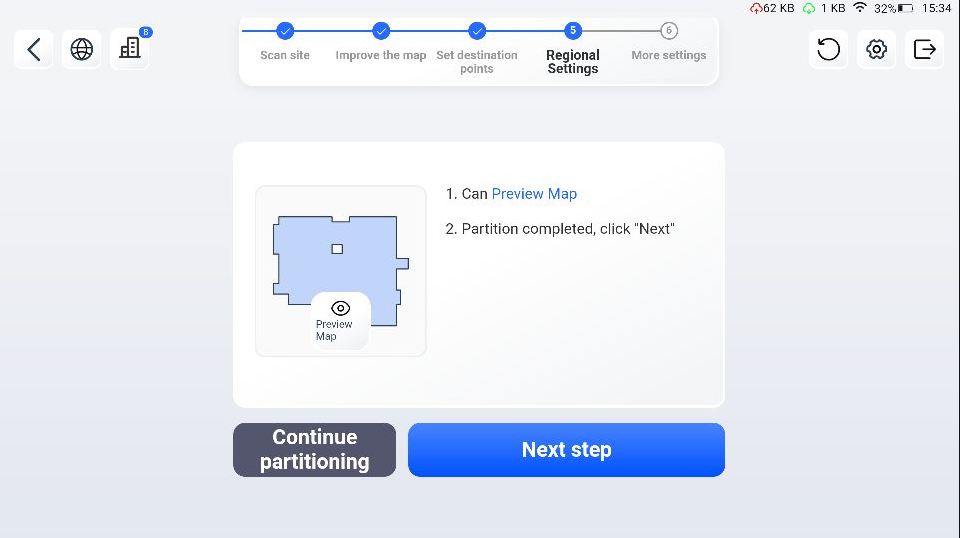
Этап 4. Разметка зон уборки
На этапе разметки зон пользователь создает зоны уборки, чтобы разделить его территорию на участки для уборки. Разделение на небольшие области является целесообразным, увеличивает интенсивность точечной уборки на территории. Позволяет роботу обсуживать желаемые зоны вне расписания для поддержания чистоты. Лучше подходит для помещений сложной формы, а так же для помещений с переменным доступом.
Этап разметки зон для уборки требует большого внимания к разметке, чем лучше разметка была сделана на предыдущих шагах, тем правильнее зоны будут созданы в автоматическом режиме.
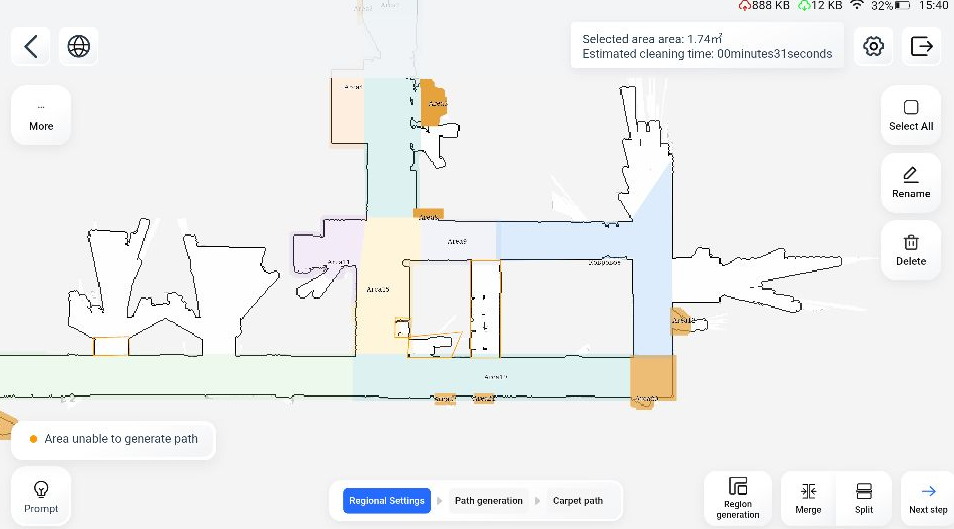
Генерация регионов
Регионы - это размеченные области, в которых робот может спланировать путь уборки. Их можно создать автономно и в ручную, для создания в ручном режиме используйте инструмент спрятанный во вкладке More:
Для классического метода с автогенерацией следуйте инструкции:
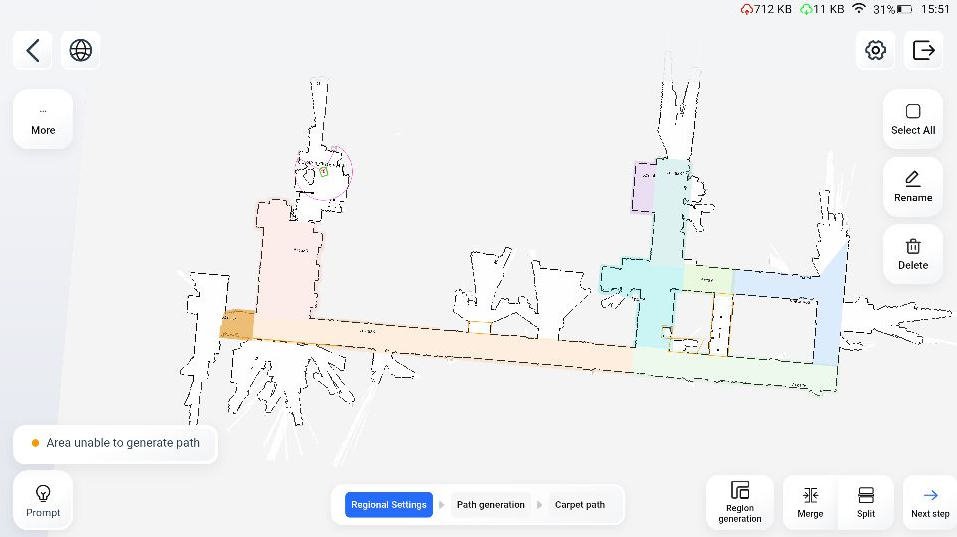
- Находять в режиме [Regional Settings] используйте Region generation
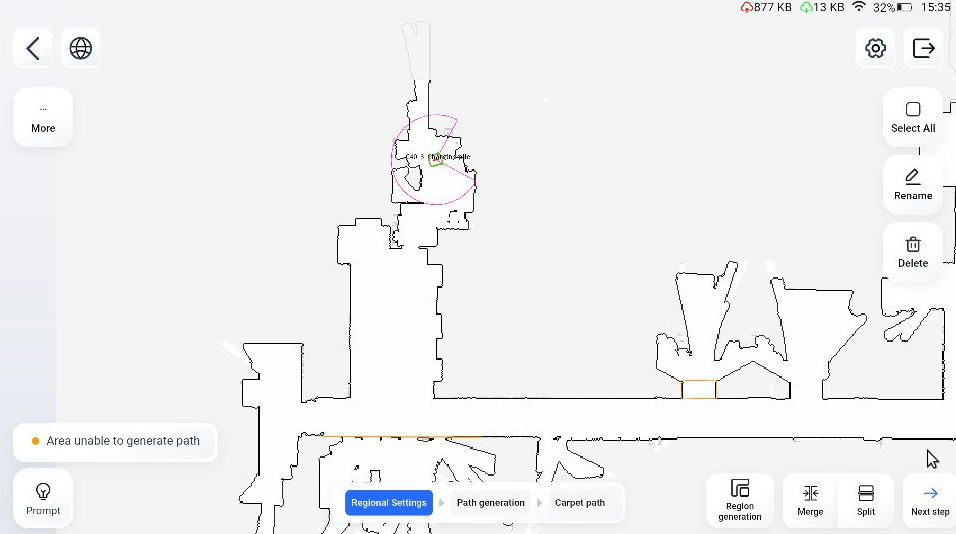 Аналитические алгоритмы автоматически распределят зоны, и перед тем как приступать к генерации пути необходимо отредактировать эти зоны.
Аналитические алгоритмы автоматически распределят зоны, и перед тем как приступать к генерации пути необходимо отредактировать эти зоны. 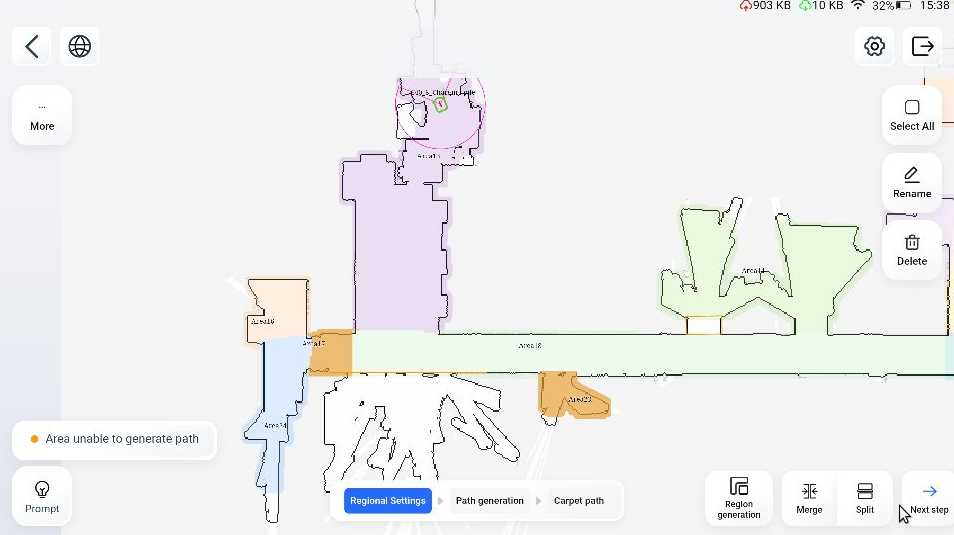
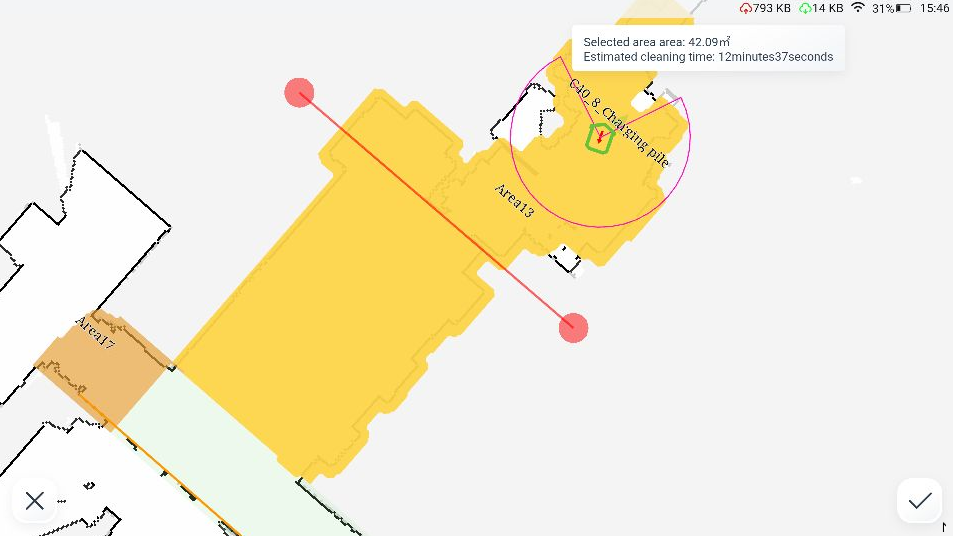
- Для корректировки зон уборки после используйте инструменты Merge, Split и Delete
- Например: были созданы паразитные зоны, размер их не пригоден для уборки и их следует объединять, используя Merge с соседствующей зоной, но это площади, на которых робот не должен проводить очистку. В этом случае, их нужно выделить, чтобы их цвет стал более контрастным и нажать Delete в меню справа
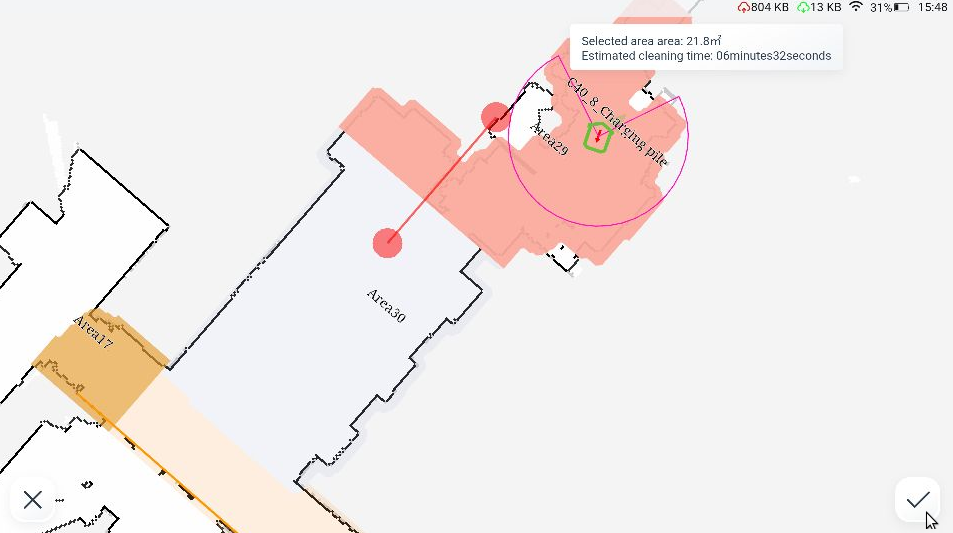
- Например: зона уборки соседствует с неотсканированной территорией
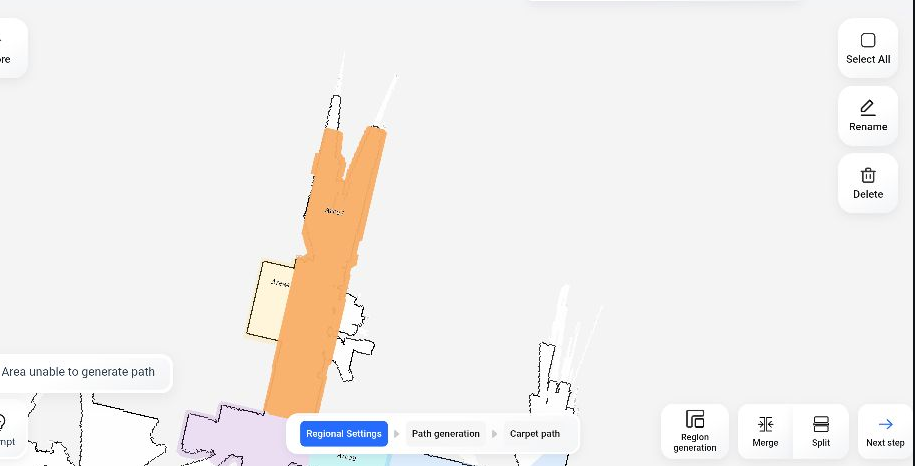 Для устранения возможных проблем нужно исключить зону выделив зону, используя инструмент Split
Для устранения возможных проблем нужно исключить зону выделив зону, используя инструмент Split - Для отсечения участка зоны необходимо разместить линию, которая обязательно должна двумя точками быть за границей выбранной зоны
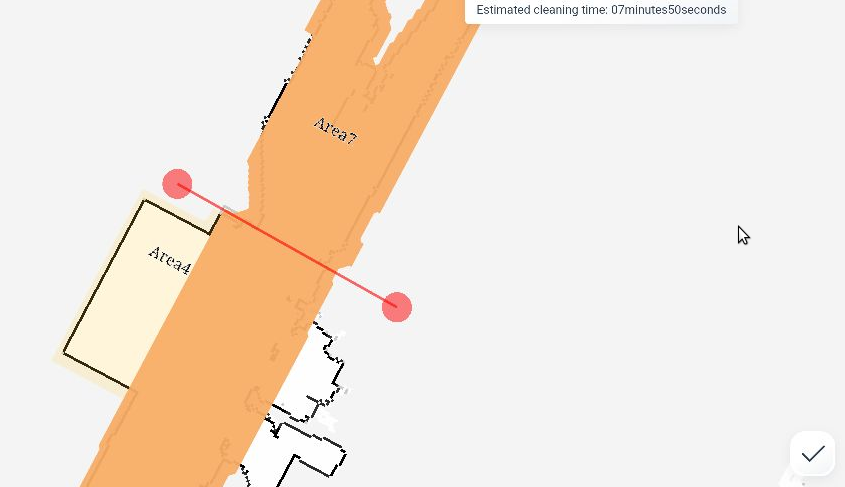
- Зона разделится и лишний участок можно будет отделить
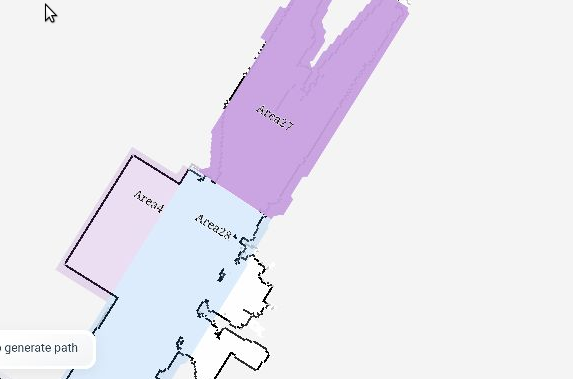
- Например: разделение сложной составной зоны
- Выделите зону и отсеките наибольший участок

- Выделите наименьший участок, который принадлежит помещению холла(Area30)
 Результат сплита:
Результат сплита: 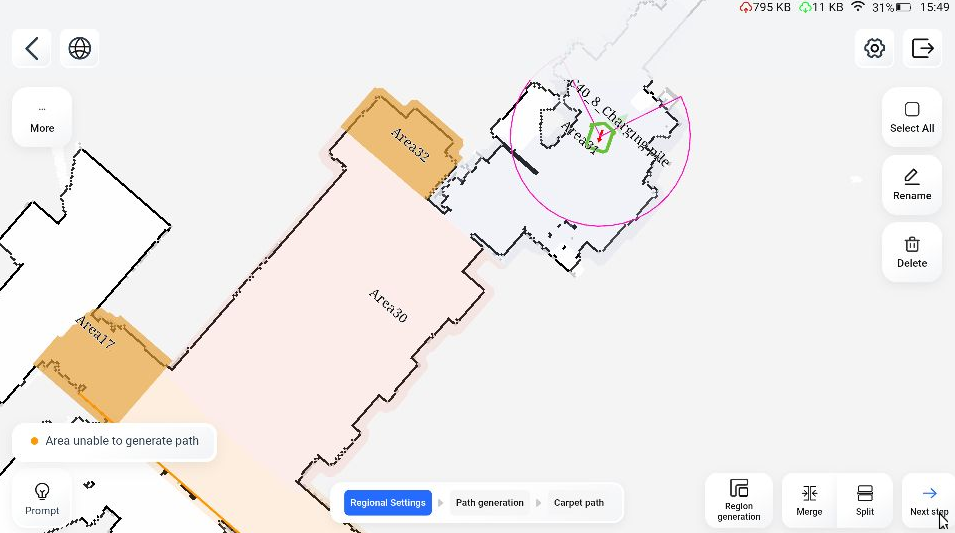
- Объедините зону (Area 30) и (Area 32), чтобы восстановить целостность зоны, которая охватывает помещение холла
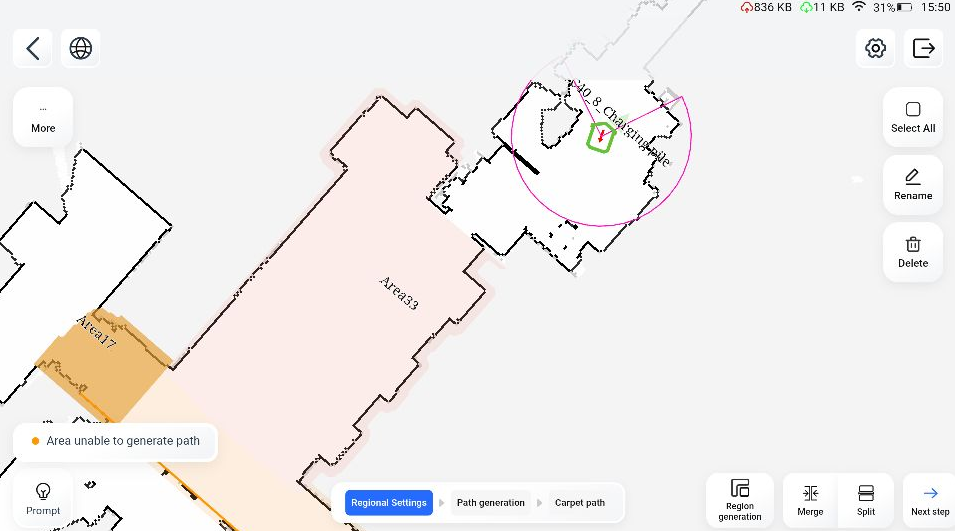
- После разметки зон уборки нажмите Next step, чтобы перейти к следующему шагу генерации путей уборки в зонах
- Если зоны размечены правильно, выбирайте зоны и применяйте правило генерации маршрута

- Нажмите на инструмент Path generation и выберите один из методов генерации Back shape или Bow shape
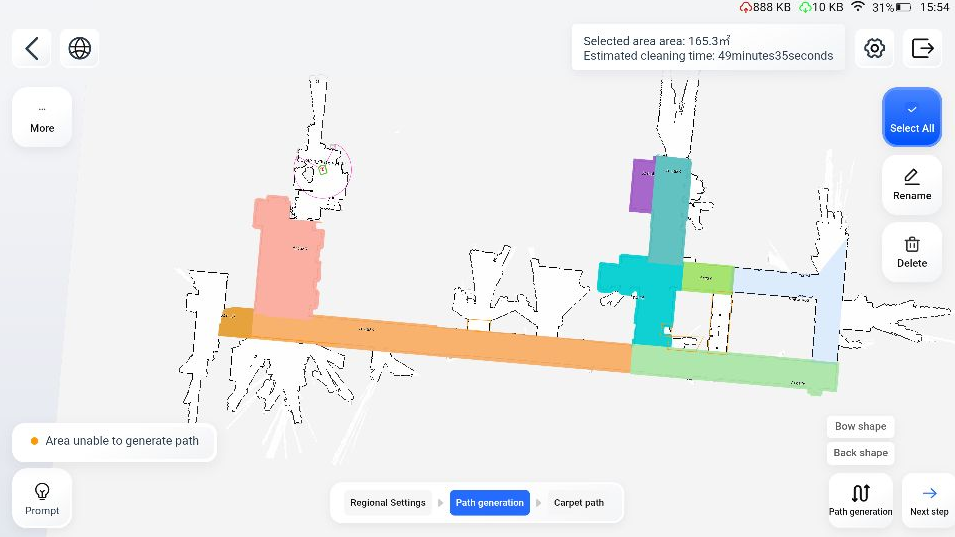
Два метода генерации позволяют лучше адаптировать уборку зон различной формы и размера.
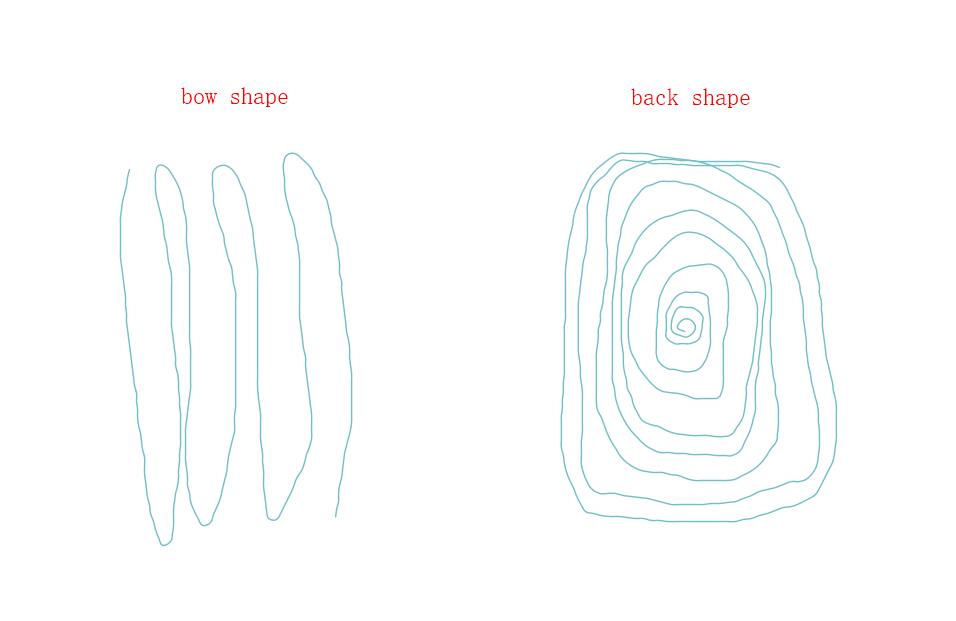
Bow shape метод по умолчанию, позволяет охватывать зоны уборки сложной формы минимизируя неохваченные участки.
Back shape метод генерации, рекомендуемый для применения к площадям, чья форма ближе к квадрату, чтобы сделать уборку более эффективной.
- Для генерации на зонах, которые были обозначены как ковровые покрытия на втором этапе используйте так же инструмент Path generation
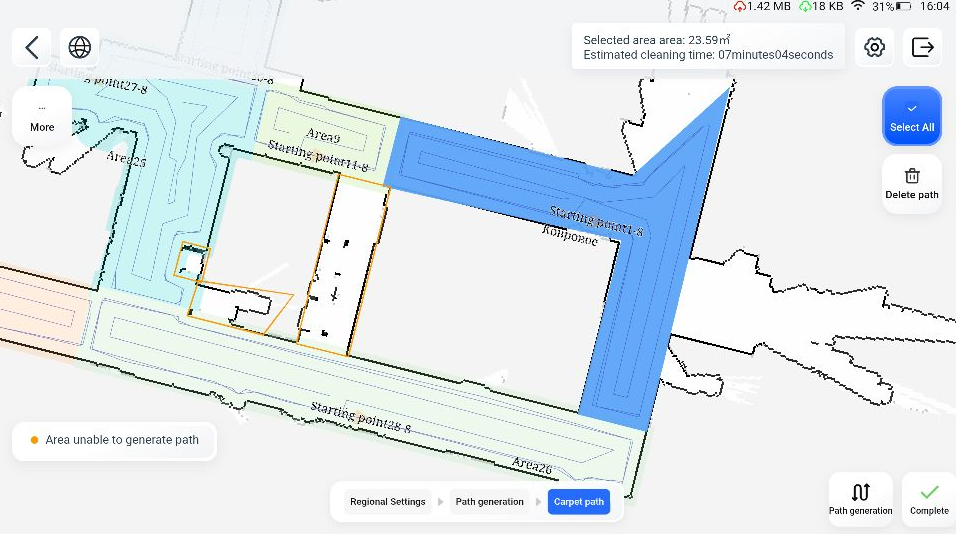
После завершения данного этапа можно так же совершить предпросмотр нажав [Preview Map] или продолжить создавать зоны уборки нажав [Continue partitioning]
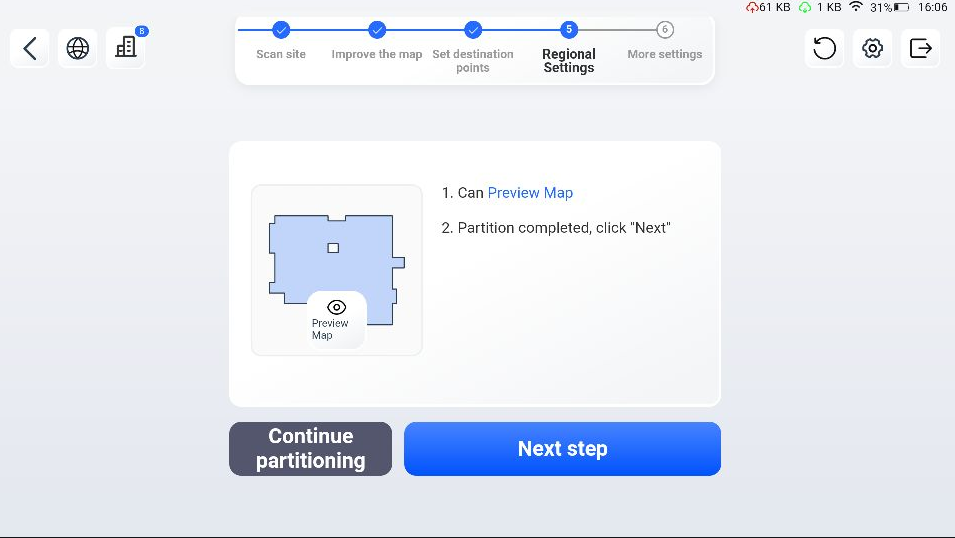
Для перехода к следующему этапу нажмите [Next step]
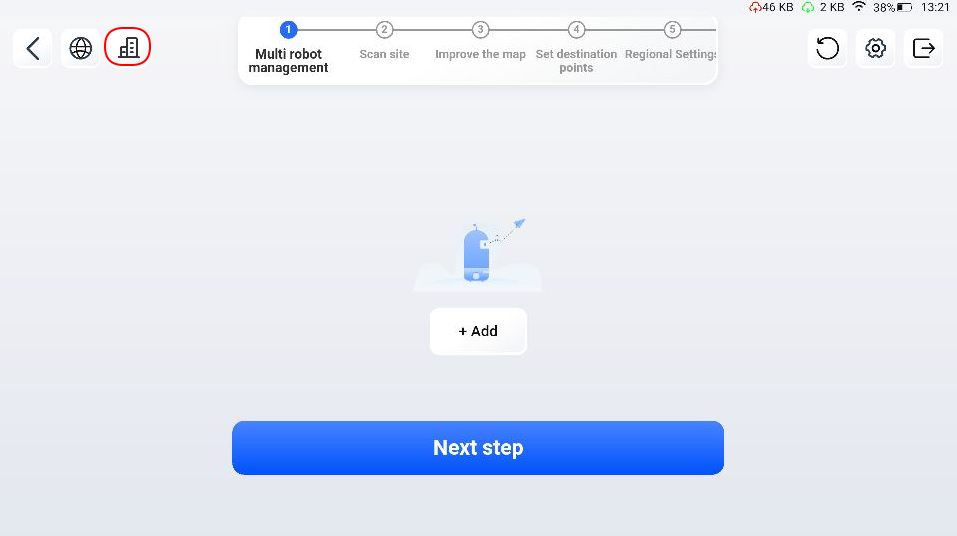
Этап 5. Дополнительные настройки.
Последний этап позволяет финализировать настройку:
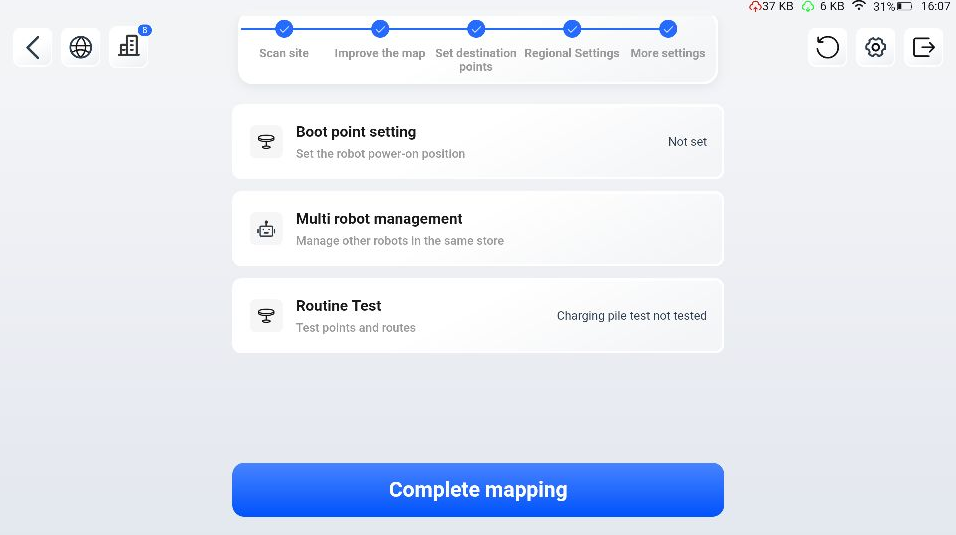
В Boot point setting можно установить дополнительную точку запуска.
Добавить роботов, которые будут работать в кооперативе на одной территории (используя одну и ту же сцену) Multi robot management.
В Routine Test предоставляет инструмент проверки стыковки с зарядной станцией.
Для загрузки карты используйте [Complete mapping]
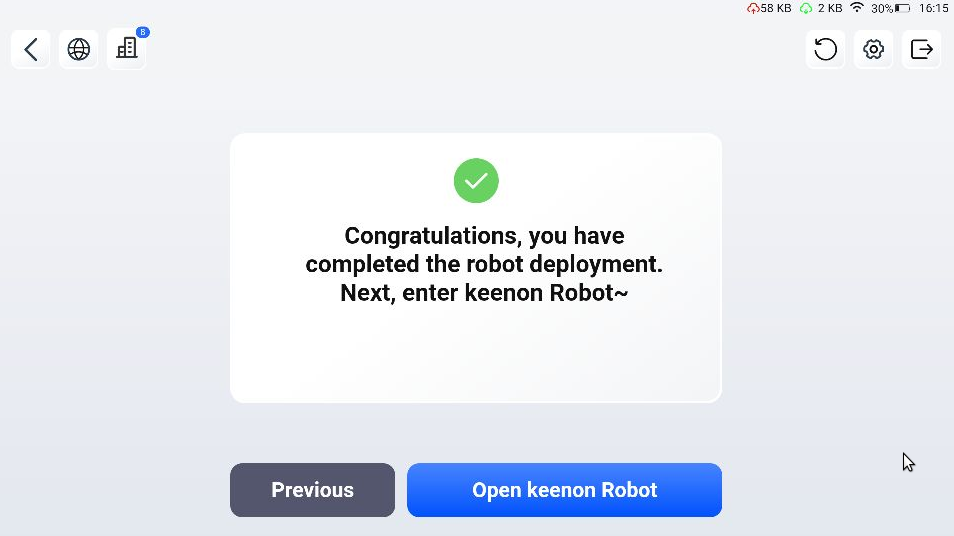
Если возникает проблема загрузки совершите повторную попытку загрузки или смените WiFi. Если проблемы сохраняются, обратитесь к поддержке.
В случае успешной загрузки будет следующее сообщение:
Описание меню:
-
Навигационный блок, по которому можно перейти на любой этап создания после разового прохождения первых трех этапов
-
Менеджер карт этажей
-
Языки (только английский и китайский)